Professional Documents
Culture Documents
Cap7 Compensacion
Uploaded by
David NasaelOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Cap7 Compensacion
Uploaded by
David NasaelCopyright:
Available Formats
PLEV 2010
Diseo y Compensacin de Sistemas de
Control
M.Sc. Javier A. Muoz V. Eduardo E. Espinosa N.
Ingeniero Civil Electrnico Ingeniero Civil Electrnico
javiermunoz@udec.cl eespinosa@udec.cl
Universidad de Concepcin Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Contenido del Capitulo PLEV 2010
Diseo y Compensacin de Sistemas de Control
I. Introduccin
II. Compensacin en Adelanto para Sistemas Continuos.
III. Compensacin en Atraso para Sistemas Continuos.
IV. Compensacin con Redes de Primer Orden Discretas.
V. Compensacin Adelanto - Atraso.
VI. Compensador P.I.D. Anlogo.
VII. Compensador P.I.D. Discreto.
Universidad de Concepcin -2- Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Introduccin PLEV 2010
Los anlisis y herramientas desarrollados hasta aqu son tiles para determinar el
controlador a utilizar en un esquema realimentado. Como se ha indicado, el controlador
deber asegurar caractersticas estticas (error en estado estacionario, etc.) y
dinmicas (sobrepaso, tiempo de asentamiento, etc.). En este captulo, se estudiarn
las redes ms difundidas como son las de adelanto, atraso y PID (continuos y discretos)
incluyendo el diseo de todas y cada una de sus componentes.
Universidad de Concepcin -3- Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Introduccin PLEV 2010
La estructura a estudiar se presenta en la Fig. 7.1, en donde deber determinarse el tipo de
controlador o combinacin de ellos y los parmetros de ste, para cumplir con requerimientos tales
como,
- Cero error en estado estacionario (yo = ydo),
- Estabilidad ( |y(t)| , t 0),
- Seguimiento ( yd(t) - y(t) = 0),
- Regulacin ( y(t) yd(t) ),
- Caractersticas dinmicas (sobrepaso, tiempo de asentamiento, margen de fase, de
ganancia,...)
- etc.
en plantas del tipo lineales, invariantes en el tiempo, continuas o discretas y/o hbridas, y SISO.
Fig. 7.1. Sistemas en L:C. a estudiar.
Universidad de Concepcin -4- Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Introduccin PLEV 2010
La estructura del compensador podr ser una red de adelanto, red de atraso, una combinacin
adelanto-atraso o un P.I.D.. La mayor diferencia entre los compensadores es que a excepcin del
compensador P.I.D., todos son compensadores de primer orden. Como herramientas de anlisis y
diseo se emplearn el L.G.R., Diagrama de Bode, y Nyquist.
Universidad de Concepcin -5- Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Adelanto para Sistemas Continuos. PLEV 2010
El compensador es del tipo:
, h ( s ) = k 1 + sTc = k s + 1 Tc ,donde
1 + Tc s s + 1 Tc
c c c
debe cumplirse que el parmetro est en el
rango 0 < < 1. Una alternativa de
implementacin para este compensador se
muestra en la figura 7.2(a), donde se
eo ( s ) R4 R2 R1C1s + 1
encuentra hc ( s ) = = que
ei ( s ) R3 R1 R2C2 s + 1
, por lo tanto, Tc=R1C1, = (R2C2)/(R1C1),
kc=(R4C1)/(R3C2)
Fig. 7.2. Red de adelanto; (a) Circuito (b) L.G:R.
(c) Nyquist, (d)(e) Bode.
Universidad de Concepcin -6- Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Adelanto para Sistemas Continuos. PLEV 2010
Caractersticas del Compensador en Adelanto
El L.G.R. del compensador, Fig. 7.2(b), indica un cero en s=-1/Tc y un polo en s=-1/(Tc), del
hc ( s ) s + 1 Tc
Nyquist de = ,Fig 7.2 (c), se aprecia que la mxima fase m cumple con la
kc s + 1 Tc
expresin sin m =
(1 ) 2 = 1 , por lo que, = 1 sin m y del bode, Fig 7.2(d) y (e), se obtiene
(1 + ) 2 1 + 1 + sin m
1 1 1 1
que log m = log + log , por lo que m = . Con estos antecedentes se puede
2 Tc Tc Tc
enunciar un procedimiento para el diseo de una red de adelanto.
Universidad de Concepcin -7- Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Adelanto para Sistemas Continuos. PLEV 2010
Tcnicas de Compensacin de Adelanto Basadas en el L.G.R.
El procedimiento es el siguiente:
1.- Enumerar las especificaciones solicitadas a la respuesta del sistema en el tiempo. Traducir
stas a una ubicacin deseada para los polos dominantes.
2.- Dibujar el L.G.R. del sistema no compensado y determinar si es posible que la ganancia lleve
los polos del sistema en L.C. a la ubicacin deseada.
3.- Si el compensador es necesario, colocar el cero de la red de adelanto bajo la ubicacin de
los polos en L.C. deseadas.
4.- Determinar la ubicacin del polo restante de manera que cumpla con la condicin de ngulo.
5.- Calcular la ganancia del sistema en L.D. y as determinar la ganancia del controlador.
Calcular la ganancia de error esttico que corresponda (kp, kv, ka).
6.- Si la ganancia de error esttico fue especificada y no se cumple, ubicar el cero ms a la
izquierda del punto original del compensador y volver a 4.
Universidad de Concepcin -8- Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Adelanto para Sistemas Continuos. PLEV 2010
Ejemplo 36
1
Se tiene: gr = y se desea =0.45 y n=4 ts=1 seg y kv=15
s ( s + 2)
Al utilizar una realimentacin unitaria con ganancia k, no se consigue llevar las races al lugar
deseado. Por lo tanto se propone una red de adelanto.
Paso 1.
=0.45 y n=4 s1,2=-4+-7.93j
Paso 2.
Dibujar L.G.R del sistema no compensado
Universidad de Concepcin -9- Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Adelanto para Sistemas Continuos. PLEV 2010
Ejemplo 36
Se tiene: gr = 1 y se desea =0.45 y n=4
s ( s + 2)
Paso 3.
Indica que 1/Tc =4
Paso 4.
Condicin de ngulo. p1 + p 2 + p 3 z1 = 180 p 3 = 49.11
7.93 7.93
tan p 3 = x = + 4 = 10.86
x4 tan p 3
Resumiendo, 1/(Tc)=10.86, Tc=0.25, =0.368, la ganancia es
( s + 1 Tc ) s s + 2 10.48
kc = ( ) = 8.888.17 = 95.87
( s + 1 Tc) s =4 + j 7.93
7.93
95.474
Con lo que kv = lm sgr ( s ) = = 17.65 por lo que el diseo es correcto.
s 0 10.862
Universidad de Concepcin - 10 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Adelanto para Sistemas Continuos. PLEV 2010
Tcnicas de Compensacin de Adelanto Basadas en el Diagrama de Bode.
Esta tcnica se justifica en el caso de tener sistemas con retardo, en cuyo caso el uso del
L.G.R. pasara indeclinablemente por una aproximacin de ste. El procedimiento es el siguiente:
1. Dibujar el diagrama de Bode para gr(s) con una ganancia tal que se satisfagan las condiciones
de error en S.S.
2. En el bode (1) determinar el M.F. del sistema no compensado. Calcular la fase necesaria a
introducir por el compensador, m. Agregar de un 10% a 30% como seguridad.
1
3. Utilizando sin m = , determinar = 1 sin m .
1+ 1 + sin m
4. Calcular la ganancia necesaria h(dB)=10 log.
5. Ubicar en el Bode de (1) la frecuencia m a la cual la atenuacin es de h(dB) y utilizando
m=1/Tc determinar Tc.
6. Dibujar el bode compensado, si las condiciones no se cumplen volver a (2) y utilizar otro margen
de seguridad.
Universidad de Concepcin - 11 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Adelanto para Sistemas Continuos. PLEV 2010
Ejemplo 37
k
Se tiene: g ( s ) = y se pide ess <10% para entrada rampa y un M.F.>30.
s ( s + 1)( s + 20 )
Paso 1.
Como se desea ess = 1/(k/20)=0.1, entonces k=200.
Bode Diagram
Gm = 6.44 dB (at 4.47 rad/sec) , Pm = 9.35 deg (at 3.07 rad/sec)
Paso 2 y 3 20
10
MF aprox. 10, por lo tanto,
Magnitude (dB)
0
m=20+8=28. Luego =0.361. -10
-20
Paso 4. -30
-135
H(db)=10 log =-4.34
Phase (deg)
-180
Paso 5.
m=4.05 y por lo tanto Tc=0.406. -225
0 1
10 10
Frequency (rad/sec)
Se hace notar que 200=200Kc Kc=2.71
Bode sistema sin compensar
Universidad de Concepcin - 12 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Atraso para Sistemas Continuos. PLEV 2010
El compensador es del tipo:
1 + sTc s + 1 Tc
hc ( s ) = kc = kc
1 + Tc s s + 1 Tc
donde debe cumplirse que el parmetro
>1. Una alternativa de implementacin para
este compensador se muestra en la figura
7.3 (a), donde se encuentra que
eo ( s ) R4 R2 R1C1s + 1
hc ( s ) = = ,
ei ( s ) R3 R1 R2C2 s + 1
R2C2 RC
con Tc = R1C1 , = y kc = 4 1
R1C1 R3C2
Fig. 7.3 Red de Atraso; (a) Circuito,
(b) L.G.R.,(c) Bode.
Universidad de Concepcin - 13 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Atraso para Sistemas Continuos. PLEV 2010
A. Caractersticas del Compensador en Atraso.
El L.G.R. del compensador, Fig 7.3(b), indica un cero en s=-1/Tc y un polo en s=-1/Tc, del
hc ( s ) s + 1 Tc
Nyquist de = , Fig 7.3 (c), se aprecia que la mxima fase m cumple con la
kc s + 1 Tc
expresin sin m =
( 1) 2 = 1 , por lo que 1 sin m
= (con m<0) y del bode, Fig 7.3 (d) y
( 1 + ) 2 1 + 1 + sin m
1
1
(e), se obtiene que log m = log + log 1 1 =
por lo que, m
. Con estos antecedentes
2 Tc Tc Tc
se puede enunciar un procedimiento para el diseo de una red de atraso.
Universidad de Concepcin - 14 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Atraso para Sistemas Continuos. PLEV 2010
B. Tcnicas de Compensacin para la Red de Atraso Utilizando L.G.R.
El procedimiento es el siguiente:
1.- Dibujar el L.G.R. para el sistema no compensado.
2.- Del comportamiento transitorio determinar la ubicacin deseada de los polos en L.C. Si el
sistema no pasa por el lugar deseado se deber emplear otra red de compensacin para que as
sea (p. ej. red de adelanto).
3.- Determinar la ganancia necesaria para obtener las races en el lugar deseado. Calcular la
constante de error esttico.
4.-Si la constante de error esttico no es suficiente, calcular el factor en que debe ser
aumentada. Este factor tambin corresponde al factor .
5.- Para asegurar que las races no se vean afectadas por el cero y polo del compensador, el
aporte neto de ngulo entre stos debe ser menor a 5. Es decir, | z comp-p comp|<5.
Universidad de Concepcin - 15 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Atraso para Sistemas Continuos. PLEV 2010
Ejemplo 38
k
Se tiene: g ( s ) = del cual se desea tener =0.45 y kv=7, disee un compensador
s ( s + 1)( s + 5 )
en atraso.
Root Locus
Paso 1. 3 System: sys
Gain: 4.16
Pole: -0.398 + 0.797i
2 Damping: 0.447
Overshoot (%): 20.8
Frequency (rad/sec): 0.891
Imaginary Axis 1
-1
-2
-3
-5 -4 -3 -2 -1 0 1
Real Axis
Paso 2 y 3 LGR sistema sin compensar.
k
Kv=7, como kv = lim sgr = = 7 k = 35
s 0 5
Universidad de Concepcin - 16 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Atraso para Sistemas Continuos. PLEV 2010
Ejemplo 38
Sin embargo, el polinomio caracterstico es k + ( s 2 + s ) ( s + 5 ) = s 3 + 6 s 2 + 5s + k y el polinomio
deseado es (s 2
+ 2n s + n2 ) ( s + a ) , con = 0.45, por lo que, ( s 2 + 0.9n s + n2 ) ( s + a ) = ...
... = s 3 + as 2 + 0.9n s 2 + 0.9n as + n2 s + n2 a = s 3 + s 2 ( 0.9n + a ) + s ( 0.9n a + n2 ) + n2 a, igualando
( )
trminos se tiene que, ( 0.9n + a ) = 6, 0.9n a + n2 = 5, n2 a = k , por lo que
a = 6 0.9n , 5 = ( 0.9n ( 6 0.9n )+ ) =
2
n
2
n + 5.4n 0.81n2 , donde n = 0.8976, y entonces
a = 5.192, n = 0.4, k = 4.183. Con estos resultados se tiene que kv=k/5=4.183/5=0.8366=kv N-C
=kv C-C / kv N-C = 8.37.
Sea Tc=10, por lo que 1/Tc=0.1, 1/Tc=0.012,
p comp = 90 +tg 1 ( ( 0.4 0.012 ) 0.8 ) = 115.87 z comp = 90 +tg 1 ( ( 0.4 0.01) 0.8 ) = 110.55
p comp z comp = 5.31
Universidad de Concepcin - 17 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Atraso para Sistemas Continuos. PLEV 2010
Ejemplo 38
En caso que los 5 deban ser exactos, se puede utilizar la siguiente expresin.
1 T
1
1 n 1 Tc
5 = tg n c
tg =
n 1 n 1
2 2
Entonces,
{ }
Tc2 { tg n2 } Tc n ( + 1) tg +n 1 2 ( 1) + tg = 0
Tc = 10.56
s + 0.0947
Finalmente en el compensador es
s + 0.0113
Universidad de Concepcin - 18 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Atraso para Sistemas Continuos. PLEV 2010
C. Tcnica de Compensacin para la Red de Atraso Utilizando el Diagrama de Bode
Al igual que en la red de adelanto, este procedimiento se justifica en el caso de tener sistemas
con retardo, en donde la utilizacin del L.G.R. como herramienta de diseo pasara
ineludiblemente por simplificaciones. El procedimiento es el siguiente:
1.- Dibujar el Bode del sistema sin compensador pero con la ganancia ajustada de manera de
cumplir con la premisa del coeficiente de error esttico, de donde se obtiene kc 1.
2.- Determinar el M.F. del sistema. Si no es suficiente, proceder de acuerdo a lo siguiente.
3.- Determinar del grfico la frecuencia (g) a la cual se generara un M.F. igual al deseado ms
5.
4.- Colocar el cero del compensador una dcada por debajo de g, es decir, 1/Tc = g/10.
5.- Medir la atenuacin necesaria en g y obtener kc de 20 log = | gr(j g)|.
Universidad de Concepcin - 19 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Atraso para Sistemas Continuos. PLEV 2010
Ejemplo 39
2500
Se tiene a gr ( s ) = y se desea un M.F.>45 y un ess para entrada rampa normalizada
s ( s + 25 )
< 0.01.
(1)Se desea
2500 2500 100
kc = 100kc kc = 1 gr ( s ) ' =
1 1 2500
kv = = = lim kc = =
ess 0.01 25 s ( s + 25 ) s ( s + 25 ) s ( 0.04s + 1)
(2)El nuevo sistema tiene un M.Fs-c=28 que no es suficiente por lo que se prosigue con el diseo.
Universidad de Concepcin - 20 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin en Atraso para Sistemas Continuos. PLEV 2010
Ejemplo 39
2500
Se tiene a gr ( s ) = y se desea un M.F.>45 y un ess para entrada rampa normalizada
s ( s + 25 )
< 0.01.
(1)g=21 (4) 1/Tc =g/10 Tc =0.47
s + 2.1
(5) 20 log = 14 dB, =3.98 kc=0.25, por lo que el compensador es hc ( s ) = 0.25
s + 0.52
Universidad de Concepcin - 21 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin con Redes de Primer Orden Discretas. PLEV 2010
Para continuar con la dualidad de las redes de primer orden continuas, se propone tambin
z + 1 Tc
estudiar la red de primer orden discreta del tipo hc ( z ) = kc . No es conveniente clasificar la
z + 1 Tc
red discreta en adelanto o atraso puesto que el signo de T y pueden ser negativos y/o positivos,
lo que dificulta la percepcin de aporte de fase. Es importante recordar la aparicin de un retardo
producto de la implementacin digital de este controlador, el que debe ser considerado a la hora de
su diseo. En este caso slo se revisa la utilizacin del L.G.R. como herramienta de diseo, puesto
que tambin permite cubrir casos con retardo, donde ste es mltiplo del tiempo de muestreo. El
procedimiento de diseo es como el explicado en el caso continuo; esto se debe a que las reglas
de construccin del L.G.R. son idnticas en ambos casos.
Universidad de Concepcin - 22 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin Adelanto-
Adelanto-Atraso. PLEV 2010
Este compensador combina ambas redes en un solo elemento. Sin embargo, el diseo de los
compensadores se realiza por separado y considerando los procedimientos antes expuestos. La
ecuacin del compensador total es,
1 + sTc1 1 + sTc 2
hc ( s ) = kc11 kc 2 2
1 + 1Tc1s 1 + 2Tc 2 s
con 1 < 1 y 2 > 1, por lo que para su diseo, se ajusta la red de adelanto (lo que modifica la
ubicacin de las races) y luego se ajusta la red de atraso para satisfacer las condiciones restantes.
Al comparar las redes se tiene la Tabla 7.1.
Universidad de Concepcin - 23 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin Adelanto-
Adelanto-Atraso. PLEV 2010
Un circuito alternativo para la implementacin anloga es ilustrado en la Fig. 7.4. El circuito tiene
la F. de T.,
1 + sTc1 1 + sTc 2
hc ( s ) = kc11 kc 2 2
1 + 1Tc1s 1 + 2Tc 2 s
eo ( s ) R6 R4 ( R1 + R3 ) C1s + 1 R2C2 s + 1
hc ( s ) = = ,
ei ( s ) R5 R3 R1C1s + 1 ( R2 + R4 ) C2 s + 1
R1 R + R4 R R R + R3 R2
con Tc1 = ( R1 + R3 ) C1 , Tc 2 = R2C2 , 1 = , 2 = 2 y kc = 6 4 1
R1 + R3 R2 R5 R3 R2 + R4 R1
Notar que se cumple que 1 < 1 y 2 > 1.
Fig. 7.4 Circuito Compensador Adelanto-Atraso.
Universidad de Concepcin - 24 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin P.I.D Anlogo. PLEV 2010
Este compensador es uno de los ms difundidos en estrategias de control anlogas y discretas.
La F. de T. del compensador anlogo es,
u (s) 1
hc ( s ) = = k p 1 + + Td s ,
e(s) sTi
donde, kp: es la ganancia proporcional, Ti: el tiempo integral, y Td: el tiempo derivativo. Su
nombre P.I.D. es por proporcional, integrativo y derivativo. En el dominio del tiempo el controlador
es,. 1
t
d
u ( t ) = k p e ( t ) + e ( t ) + Td e ( t ) ,
Ti
dt
lo que en Laplace se puede escribir como,
u (s) k
hc ( s ) = = k p + i + kd s,
e(s) s
donde, kp: es la ganancia proporcional, ki: es la ganancia integral y kd: es la ganancia derivativa.
Un circuito tentativo para la implementacin del P.I.D. en forma anloga es el ilustrado en la Fig.
7.5 cuyas ecuaciones son,
Universidad de Concepcin - 25 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin P.I.D Anlogo PLEV 2010
eo ( s ) R4 R1C1 + R2C2
1 R1C1 R2C2
hc ( s ) = = 1 + + ,
ei ( s ) R3 ( 1 1
R1C2 R C + R 2 2)
C s R C
1 1 + R2 2
C
R R C + R2C2 RC R C
con k p = 4 1 1 , Ti = ( R1C1 + R2C2 ) y Td = 1 1 2 2
R3 R1C2 R1C1 + R2C2
El problema es cunto deben ser los parmetros de un P.I.D. si se considera que tiene un polo en
el origen y dos ceros ubicables arbitrariamente de acuerdo a la siguiente representacin
i d s + Ti s + 1
1 ki TT 2
hc ( s ) = k p 1 + + Td s = k p + + kd s = k p ,
sT i s Ti s
El problema tambin se conoce como sintonizacin del controlador. Para simplificar el problema
se estudian los modos de operacin del P.I.D.
Fig. 7.5 Circuito para Compensador P.I.D.
Universidad de Concepcin - 26 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin P.I.D Anlogo PLEV 2010
eo ( s ) R4 R1C1 + R2C2
1 R1C1 R2C2
hc ( s ) = = 1 + + ,
ei ( s ) R3 ( 1 1
R1C2 R C + R 2 2)
C s R C
1 1 + R2 2
C
R R C + R2C2 RC R C
con k p = 4 1 1 , Ti = ( R1C1 + R2C2 ) y Td = 1 1 2 2
R3 R1C2 R1C1 + R2C2
El problema es cunto deben ser los parmetros de un P.I.D. si se considera que tiene un polo en
el origen y dos ceros ubicables arbitrariamente de acuerdo a la siguiente representacin
i d s + Ti s + 1
1 ki TT 2
hc ( s ) = k p 1 + + Td s = k p + + kd s = k p ,
sT i s Ti s
El problema tambin se conoce como sintonizacin del controlador. Para simplificar el problema
se estudian los modos de operacin del P.I.D.
Fig. 7.5 Circuito para Compensador P.I.D.
Universidad de Concepcin - 27 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin P.I.D Anlogo PLEV 2010
Modos de Operacin
Proporcional
Ti, Td 0 hc ( s ) = k p ,
En una planta se ajusta kp para asegurar un ess o M.F. dados.
Proporcional-Integral.
(Td 0) 1 sTi + 1
hc ( s ) = k p 1 + = kp ,
sTi sTi
s +1 T c s +1 T c sT + 1
Es una red de atraso, kc , con > 1, con , kc = kc c
s + 1 T c s s
Proporcional-Derivativo (Ti )
hc ( s ) = k p {1 + Td s} ,
1 + sTc
kc , con < 1, con 0 : kc ' (1 + sTc )
Es una red de adelanto: 1 + sTc
Universidad de Concepcin - 28 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin P.I.D Anlogo PLEV 2010
Sintonizacin de un P.I.D.
Esta metodologa est basada en la determinacin de una manera prctica o emprica de los
parmetros kp, Ti y Td. Es decir, mediante experimentacin en la planta o sistema. Se distinguen
dos casos, el primero para sistemas que pueden operar en L.A. y el segundo para sistemas que
slo pueden operar en L.C. En este ltimo se distinguen entre sistemas que pueden oscilar en
forma sostenida y los que no lo pueden hacer.
Compensacin emprica en L.A. (Ziegler-Nichols en L.A.)
Se utiliza en sistemas que pueden operar en L.A. como son los sistemas estables. Los
parmetros del controlador se fijan en funcin de los parmetros de la respuesta de la planta en
L.A. a una entrada escaln que se asume de primer orden y con retardo, Fig. 7.6. En particular, se
escogen los parmetros de acuerdo a la Tabla 7.2.
Universidad de Concepcin - 29 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin P.I.D Anlogo PLEV 2010
Este diseo persigue que la respuesta en L.C. no tenga un sobrepaso mayor al 25% ante
entrada escaln. Ntese que este mtodo se aplica si la planta responde con una dinmica tipo s.
No se tiene esto cuando la planta tiene polos en el eje imaginario o es inestable. Para estos casos
se tienen las alternativas siguientes.
Fig. 7.6 Sintonizacin de un P.I.D. en L.A. (Ziegler-Nichols en L.A.).
Universidad de Concepcin - 30 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin P.I.D Anlogo PLEV 2010
Compensacin emprica en L.C. (Ziegler-Nichols en L.C.)
Este mtodo se utiliza en sistemas que no pueden operar en L.A., como por ejemplo los
sistemas que tienen polos en el origen (estanques). Adems se requiere que el sistema pueda
permanecer oscilando en L.C. en forma permanente para algn valor de la ganancia. Para
sintonizar el controlador se hace Ti y Td 0 y se incrementa kp hasta que el sistema oscile
en forma sostenida Fig. 7.7. Esta ganancia es denomina kcr y el perodo de oscilacin se
denomina Tcr. Con estos valores se utiliza la Tabla 7.3 para determinar los parmetros del
controlador P.I.D..
Fig. 7.7 Sintonizacin de un P.I.D. en L.C. (Ziegler- TABLA 7.3 Seleccin de parmetros de un PID
Nichols en L.C.). mediante Ziegler-Nichols en L.C..
Universidad de Concepcin - 31 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin P.I.D Anlogo PLEV 2010
Harriot
Si el sistema en L.C. nunca oscila en forma sostenida y no se puede operar en L.A., entonces se
puede llevar con Ti y Td 0 a una oscilacin amortiguada tal que la razn b/a (Fig. 7.8) sea
. En la oscilacin se define Tcr como el perodo de oscilacin y con este valor se ajustan Ti =
Tcr/6 y Td = Tcr/1.5, luego se hace operar el sistema en L.C. y se modifica kp tal que la razn b/a
sea nuevamente.
Fig. 7.8.Determinacin de Tcr en el mtodo de sintonizacin de Harriot
Universidad de Concepcin - 32 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin P.I.D Discreto. PLEV 2010
La popularidad y xito del control P.I.D. continuo ha motivado su utilizacin en sistemas discretos.
Sin embargo, la derivada como tal no existe en sistemas digitales por lo que se ha optado por
considerar a este controlador discreto como uno que tiene un integrador puro (un polo en 1) y dos
ceros.
P.I.D. Discreto Generalizado.
Se considera al controlador con un polo en 1 y dos ceros. As, los ceros y la ganancia podrn ser
asignados arbitrariamente y por tanto, para un caso particular, la problemtica se reduce a
determinar estos valores. Un controlador P.I.D. discreto es entonces,
hc ( z ) = k p
z 2 + b1 z + b0
= kp
( z + z1 )( z + z2 )
,
z 1 z 1
en donde kp, b1 y b0 son parmetros a determinar. Los procedimientos anteriores son vlidos
para su diseo en el caso de considerar un solo cero, pues entonces se tiene una red de primer
orden. Es importante destacar que la implementacin en un sistema digital de este controlador
como cualesquier controlador discreto agrega un retardo igual al tiempo de muestreo T, el cual
debe ser considerado a la hora del diseo.
Universidad de Concepcin - 33 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin P.I.D Discreto. PLEV 2010
P.I.D. Discreto Aproximado.
Una forma alternativa de determinar los coeficientes del controlador es mediante la aproximacin
del controlador continuo. Es decir, realizar el diseo del controlador P.I.D. continuo y luego
encontrar una aproximacin discreta. Sea el controlador P.I.D. continuo,
1
t
d
u ( t ) = k p e ( t ) + e ( t ) + Td dt e ( t ) ,
Ti
El que se puede aproximar por,
1 e ( kT ) + e ( kT T ) e ( kT ) + e ( kT T )
u ( kT ) = k p e ( kT ) + S ( kT T ) + T +
d T ,
T1 2 T
Donde S(kT-T) es la integral hasta el instante kT-T. Tambin se puede escribir,
1 e ( kT T ) + e ( kT 2T )
u ( kT T ) = k p e ( kT T ) + S ( kT T ) + Td ,
T1 T
Tomando u(kT)-u(kT-T) se tiene,
e ( kT ) e ( kT T ) +
T
2Ti
( e ( kT ) e ( kT T ) ) +
u ( kT ) u ( kT T ) = k p ,
( e ( kT ) 2e ( kT T ) + e ( kT 2T ) )
Td
T
Universidad de Concepcin - 34 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin P.I.D Discreto. PLEV 2010
P.I.D. Discreto Aproximado.
o bien,
T Td T 2Td Td
u ( kT ) u ( kT T ) = k p 1 + + e ( kT ) + 1 + e ( kT T ) + e ( kT 2T )
2Ti T 2Ti T T
y que corresponde a una frmula directamente implementable en un sistema digital. Sin embargo,
al tomar la T.Z. para determinar lo que se est agregando como controlador se tiene que,
T Td T 2Td 1 Td 2
u ( z ) z 1u ( z ) = k p 1 + + e ( z ) + 1 + z e ( z ) + z e ( z )
2Ti T 2Ti T T
O bien,
T Td 2 T 2Td Td
z 2u ( z ) zu ( z ) = k p 1 + + z e ( z ) + 1 + ( )
ze z + e ( )
z
2Ti T 2Ti T T
Lo que corresponde a la F.de T.
T Td 2 T 2Td Td
1 +
2T T + z + 1 + z +
u ( z) 2Ti T T
= kp i
e( z) z ( z 1)
Universidad de Concepcin - 35 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
Compensacin P.I.D Discreto. PLEV 2010
P.I.D. Discreto Aproximado.
Claramente, la F. de T. anterior aporta con dos ceros ubicables arbitrariamente, un polo en 1 y un
polo en el origen. Este ltimo no es parte de lo esperado del P.I.D. continuo y es producto del
retardo incluido por la aproximacin de su derivada. En efecto, si Td = 0, se tiene que la F. de T.
resultante es, T T
1 + z 2
+ 1 + z
u ( z) 2Ti 2Ti
= kp
e( z) ( z 1)
la que tiene un cero y un polo en 1. Ntese que para efectos de anlisis, todava debe agregarse
el retardo por clculo. Este agrega un polo ms en el origen el que sin dudas va en desmedro de
los ndices de estabilidad.
Universidad de Concepcin - 36 - Javier Muoz V.
Departamento de ingeniera Elctrica Eduardo Espinosa N.
You might also like
- Trabajo Practico 1 (Comunicaciones 2)Document9 pagesTrabajo Practico 1 (Comunicaciones 2)David NasaelNo ratings yet
- 21 - 06 - 2020 - Fuera de Juego - ServidorDocument18 pages21 - 06 - 2020 - Fuera de Juego - ServidorDavid NasaelNo ratings yet
- Cuando Algo Sale Mal TBuchDocument2 pagesCuando Algo Sale Mal TBuchDavid NasaelNo ratings yet
- Tablero de IndicadoresDocument1 pageTablero de IndicadoresDavid NasaelNo ratings yet
- IshikawaDocument2 pagesIshikawaDavid NasaelNo ratings yet
- Control Digital, Teoría y Práctica 2ed - Luis Eduardo García JaimesDocument427 pagesControl Digital, Teoría y Práctica 2ed - Luis Eduardo García JaimesGiovanny Alvarez94% (16)
- Trabajo Practico 2 (Comunicaciones 2)Document8 pagesTrabajo Practico 2 (Comunicaciones 2)David NasaelNo ratings yet
- Ley 19587 y Decreto 351-79Document65 pagesLey 19587 y Decreto 351-79Tongas99No ratings yet
- Mediciones Electricas - Juan Sabato PDFDocument151 pagesMediciones Electricas - Juan Sabato PDFDenis Van ZandwegheNo ratings yet
- Central Elementos 2013Document101 pagesCentral Elementos 2013David NasaelNo ratings yet
- Peligro y RiesgoDocument5 pagesPeligro y RiesgoDavid NasaelNo ratings yet
- QUÍMICADocument9 pagesQUÍMICADavid NasaelNo ratings yet
- El Sistema Legal ArgentinoDocument20 pagesEl Sistema Legal ArgentinoDavid NasaelNo ratings yet
- QUÍMICADocument9 pagesQUÍMICADavid NasaelNo ratings yet
- Cap7 MosfetDocument51 pagesCap7 MosfetAldo SalazarNo ratings yet
- SCC w7 CL 2Document22 pagesSCC w7 CL 2David NasaelNo ratings yet
- Teoria de Las Comunicaciones - Pedro E. DanizioDocument295 pagesTeoria de Las Comunicaciones - Pedro E. Daniziogonzalo100% (2)
- Calculo de Un AmplificadorDocument1 pageCalculo de Un AmplificadorDavid NasaelNo ratings yet
- ResistenciasDocument2 pagesResistenciasDavid NasaelNo ratings yet
- Notas Curso ElectricidadDocument53 pagesNotas Curso ElectricidadelectricistabuenoNo ratings yet
- 2011 Calculo de Circuitos RamalesDocument35 pages2011 Calculo de Circuitos Ramalesalguesi16No ratings yet
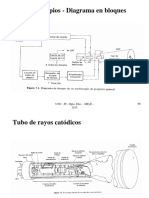
- 2 Osciloscopio2015Document35 pages2 Osciloscopio2015David NasaelNo ratings yet
- Simulación de Circuitos Con MultisimDocument22 pagesSimulación de Circuitos Con MultisimyemerNo ratings yet
- 1 - Medición de Parámetros Básicos2015Document29 pages1 - Medición de Parámetros Básicos2015David NasaelNo ratings yet
- Medidor NARDADocument17 pagesMedidor NARDADavid NasaelNo ratings yet
- Fusibles Lupo, CrossfoxDocument3 pagesFusibles Lupo, CrossfoxSebastian Sánchez83% (35)
- Medidor NARDADocument17 pagesMedidor NARDADavid NasaelNo ratings yet
- Homolog NQNDocument1 pageHomolog NQNDavid NasaelNo ratings yet
- MODULO 05 COAXIAL SR PDFDocument95 pagesMODULO 05 COAXIAL SR PDFAnderson NuñezNo ratings yet
- Evaluacion SeñalesDocument5 pagesEvaluacion SeñalesDavid NasaelNo ratings yet
- Historia de La Escuela Amable ArauzDocument2 pagesHistoria de La Escuela Amable ArauzMauricio Pilataxi67% (3)
- Felipe Morales - La Malla Conceptual de Sentido Común Sobre La ConscienciaDocument20 pagesFelipe Morales - La Malla Conceptual de Sentido Común Sobre La ConscienciaFelipe MoralesNo ratings yet
- UCIDocument30 pagesUCIÁngel Josué Aguirre Morán100% (1)
- Trabajo de Mi AmorcitoDocument3 pagesTrabajo de Mi AmorcitoZholNo ratings yet
- Acto Dia de La Tradición Turno MAÑANADocument3 pagesActo Dia de La Tradición Turno MAÑANALaura SalarNo ratings yet
- Microcurriculo HidraulicaDocument2 pagesMicrocurriculo HidraulicaAlexis ForeroNo ratings yet
- Formato SyllabusDocument4 pagesFormato SyllabusDianelis SanchezNo ratings yet
- EvangelizarDocument2 pagesEvangelizarRamiro Ortiz AlcocerNo ratings yet
- Carta Estudiante CI-1312 Iciclo2016Document5 pagesCarta Estudiante CI-1312 Iciclo2016Marcelo SolórzanoNo ratings yet
- Esquema de Las Funciones Del LenguajeDocument1 pageEsquema de Las Funciones Del LenguajeMari PérezNo ratings yet
- Epidemiología DescriptivaDocument8 pagesEpidemiología Descriptivaalfred martinezNo ratings yet
- PruebaLibro Mamire El Ultimo NiñoDocument4 pagesPruebaLibro Mamire El Ultimo NiñoLorenzoCortezAraya100% (2)
- Alicia Stolkiner. RedesDocument21 pagesAlicia Stolkiner. RedesNeelu BoettiNo ratings yet
- Triptico de CienciasDocument2 pagesTriptico de CienciasMArcos ARenas EUstaquioNo ratings yet
- Inciso A y H Internet de Las Cosas y Presentaciones de PowerpointDocument7 pagesInciso A y H Internet de Las Cosas y Presentaciones de PowerpointEduardo MatamorosNo ratings yet
- Rejilla LingualDocument8 pagesRejilla LingualPablo MezaNo ratings yet
- Confecciones LalangueDocument25 pagesConfecciones LalangueCarlos Porras LumbreNo ratings yet
- PLAN-2017 Horarios Verano 2019 - 2020Document6 pagesPLAN-2017 Horarios Verano 2019 - 2020Nelson Campos LauraNo ratings yet
- Cartillas DiocesanaDocument38 pagesCartillas DiocesanaDiego VillalbaNo ratings yet
- Levántate Alma CristianaDocument2 pagesLevántate Alma CristianaOmar OmarNo ratings yet
- Teleclase 16 OrtDocument14 pagesTeleclase 16 OrtRosaili RodríguezNo ratings yet
- Adverbio de Tiempo Lugar y ModoDocument4 pagesAdverbio de Tiempo Lugar y ModoGiovanni Sánchez100% (1)
- Confesiones de MCDocument8 pagesConfesiones de MCAlejandra GonzálezNo ratings yet
- El Nuevo Dardo en La Palabra.Document7 pagesEl Nuevo Dardo en La Palabra.Germ MartianNo ratings yet
- Cien Sonetos de AmorDocument1 pageCien Sonetos de AmorCjprNo ratings yet
- El ABC Emocional de Albert EllisDocument4 pagesEl ABC Emocional de Albert EllisJuan Pablo Zapata RamírezNo ratings yet
- Madurez EscolarDocument11 pagesMadurez EscolarMarce Caris100% (2)
- Circuitos Con Resistencias Eléctricas en Serie y ParaleloDocument9 pagesCircuitos Con Resistencias Eléctricas en Serie y ParaleloWalmer GutierrezNo ratings yet
- Planificacion Didactica TecnologiaDocument3 pagesPlanificacion Didactica TecnologiaKatherin Suley MartinezNo ratings yet
- El BautismoDocument2 pagesEl BautismoDaniel AbreuNo ratings yet