You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Amoco - Drilling Fluid ManualDocument444 pagesAmoco - Drilling Fluid Manualbetakorbo100% (12)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Bop - Inspection and TestingDocument53 pagesBop - Inspection and TestingAustin AsuquoNo ratings yet
- Norwegian Oil and Gas guidelines for well integrityDocument71 pagesNorwegian Oil and Gas guidelines for well integrityziani1976No ratings yet
- Drilling Formulas Calculation Sheet Version 1.6Document252 pagesDrilling Formulas Calculation Sheet Version 1.6sharafudheen_s100% (2)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Air Algerie Confirmation SAID ZIANI L9TV38Document2 pagesAir Algerie Confirmation SAID ZIANI L9TV38ziani1976No ratings yet
- Introduction To Wireline LoggingDocument76 pagesIntroduction To Wireline Loggingمحمد أحمد عبداللطيفNo ratings yet
- MCQs on Defence Audit Code Chapter 9 and 10Document2 pagesMCQs on Defence Audit Code Chapter 9 and 10Rustam SalamNo ratings yet
- Accounts - User Guide: Release R15.000Document207 pagesAccounts - User Guide: Release R15.000lolitaferozNo ratings yet
- Financial Audit NotesDocument11 pagesFinancial Audit NotesMamunoor RashidNo ratings yet
- Duplex Color Image Reader Unit C1 SMDocument152 pagesDuplex Color Image Reader Unit C1 SMWatcharapon WiwutNo ratings yet
- NEBOSH ITC Oil and Gas SyllabusDocument12 pagesNEBOSH ITC Oil and Gas Syllabusziani1976100% (1)
- NEBOSH ITC Oil and Gas SyllabusDocument12 pagesNEBOSH ITC Oil and Gas Syllabusziani1976100% (1)
- Zaranda Finlay 684 Manual Parts CatalogDocument405 pagesZaranda Finlay 684 Manual Parts CatalogRicky Vil100% (2)
- NORSOKDocument224 pagesNORSOKJohanDuitama100% (1)
- A Study of Factors Influencing The Consumer Behavior Towards Direct Selling Companies With Special Reference To RCM Products1Document79 pagesA Study of Factors Influencing The Consumer Behavior Towards Direct Selling Companies With Special Reference To RCM Products1Chandan SrivastavaNo ratings yet
- Qatari AirwayDocument4 pagesQatari AirwayReband AzadNo ratings yet
- 18DC - PPT - Tech - Sess - 16x9 Rev2Document18 pages18DC - PPT - Tech - Sess - 16x9 Rev2ZIANINo ratings yet
- Answer For SupervisorDocument3 pagesAnswer For Supervisorziani1976No ratings yet
- SPE77231 Tech Developments in Modular Rig DesignDocument14 pagesSPE77231 Tech Developments in Modular Rig Designziani1976No ratings yet
- 02 Basics of Shale Plays Shale BasinsDocument93 pages02 Basics of Shale Plays Shale Basinsziani1976No ratings yet
- Staying safe and protecting yourself from CoronavirusDocument18 pagesStaying safe and protecting yourself from CoronavirusImam Hasan IdrisiNo ratings yet
- SPE-119777 Can Topdrive Handle Drill To LimitDocument10 pagesSPE-119777 Can Topdrive Handle Drill To Limitziani1976No ratings yet
- Well Design Case StudyDocument36 pagesWell Design Case StudyAvinash KaurNo ratings yet
- Amco Drilling ManualDocument149 pagesAmco Drilling Manualtarang_tusharNo ratings yet
- QWEr ZianDocument26 pagesQWEr Zianziani1976No ratings yet
- Well Design Case StudyDocument36 pagesWell Design Case StudyAvinash KaurNo ratings yet
- Chrono Strat Chart 20151Document1 pageChrono Strat Chart 20151ziani1976No ratings yet
- RiskAssessmentAndManagementAnalysis - RAM - of BP Tapered Production Casing Plan-GLM - DHSG-Jan2011Document4 pagesRiskAssessmentAndManagementAnalysis - RAM - of BP Tapered Production Casing Plan-GLM - DHSG-Jan2011ziani1976No ratings yet
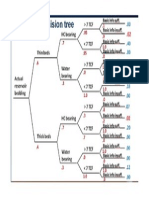
- FE Decision TreeDocument1 pageFE Decision Treeziani1976No ratings yet
- Chrono Strat Chart 20151Document1 pageChrono Strat Chart 20151ziani1976No ratings yet
- Advanced Hydraulic Fracturing ZianiDocument10 pagesAdvanced Hydraulic Fracturing Zianiziani1976No ratings yet
- Geomechanic PorePressureDocument5 pagesGeomechanic PorePressureadeeyoNo ratings yet
- Ballooning EffectDocument10 pagesBallooning Effectmypass1989No ratings yet
- Aade 07 Ntce 11 PDFDocument11 pagesAade 07 Ntce 11 PDFziani1976No ratings yet
- Drilling Dolerite Drilling OperationsDocument3 pagesDrilling Dolerite Drilling Operationsziani1976No ratings yet
- Manual Mue Home RGBDocument8 pagesManual Mue Home RGBJason OrtizNo ratings yet
- Bataan Peninsula State University - Balanga Campus: Certificate of RegistrationDocument1 pageBataan Peninsula State University - Balanga Campus: Certificate of RegistrationMichael PeraltaNo ratings yet
- Chapter 2 FlywheelDocument24 pagesChapter 2 Flywheelshazwani zamriNo ratings yet
- Product Models Comparison: Fortigate 1100E Fortigate 1800FDocument1 pageProduct Models Comparison: Fortigate 1100E Fortigate 1800FAbdullah AmerNo ratings yet
- Appendix 9A: Standard Specifications For Electrical DesignDocument5 pagesAppendix 9A: Standard Specifications For Electrical Designzaheer ahamedNo ratings yet
- MACROECONOMICSDocument95 pagesMACROECONOMICSClaudine Jeanne NillamaNo ratings yet
- GeM Bidding 2568310Document9 pagesGeM Bidding 2568310SICURO INDIANo ratings yet
- Mecafix 120: Description Technical DataDocument1 pageMecafix 120: Description Technical DataJuan Carlos EspinozaNo ratings yet
- Final Year Project A Report Assessment Form (10%)Document5 pagesFinal Year Project A Report Assessment Form (10%)Chong Ru YinNo ratings yet
- T. Herndon, M. Asch, R. Pollin - Does High Public Debt Consistently Stifle Economic Growth. A Critique of Reinhart and RogoffDocument26 pagesT. Herndon, M. Asch, R. Pollin - Does High Public Debt Consistently Stifle Economic Growth. A Critique of Reinhart and RogoffDemocracia real YANo ratings yet
- 2011 REV SAE Suspension Kiszco PDFDocument112 pages2011 REV SAE Suspension Kiszco PDFRushik KudaleNo ratings yet
- R20qs0004eu0210 Synergy Ae Cloud2Document38 pagesR20qs0004eu0210 Synergy Ae Cloud2Слава ЗавьяловNo ratings yet
- Microprocessor Based Systems: by Nasir Mahmood Nasir - Mahmood@seecs - Edu.pkDocument15 pagesMicroprocessor Based Systems: by Nasir Mahmood Nasir - Mahmood@seecs - Edu.pkMuhammad ZubairNo ratings yet
- Application Tracking System: Mentor - Yamini Ma'AmDocument10 pagesApplication Tracking System: Mentor - Yamini Ma'AmBHuwanNo ratings yet
- COA (Odoo Egypt)Document8 pagesCOA (Odoo Egypt)menams2010No ratings yet
- 22 Caltex Philippines, Inc. vs. Commission On Audit, 208 SCRA 726, May 08, 1992Document36 pages22 Caltex Philippines, Inc. vs. Commission On Audit, 208 SCRA 726, May 08, 1992milkteaNo ratings yet
- Questions For ReviewDocument2 pagesQuestions For ReviewJoemar JavierNo ratings yet
- SWOT Analysis of Fruit Juice BusinessDocument16 pagesSWOT Analysis of Fruit Juice BusinessMultiple UzersNo ratings yet
- Newcomb Theodore MDocument20 pagesNewcomb Theodore MBang Ahmad UstuhriNo ratings yet
- Railway Reservation System Er DiagramDocument4 pagesRailway Reservation System Er DiagramPenki Sarath67% (3)
- CSCI5273 PS3 KiranJojareDocument11 pagesCSCI5273 PS3 KiranJojareSales TeamNo ratings yet
- Manual Circulação Forçada PT2008Document52 pagesManual Circulação Forçada PT2008Nuno BaltazarNo ratings yet
- SS Corrosion SlidesDocument36 pagesSS Corrosion SlidesNathanianNo ratings yet
- Dynamics of Fluid-Conveying Beams: Governing Equations and Finite Element ModelsDocument22 pagesDynamics of Fluid-Conveying Beams: Governing Equations and Finite Element ModelsDario AcevedoNo ratings yet