You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 3 KinematicsDocument100 pages3 KinematicsAnonymous NameNo ratings yet
- Stuart L. Shapiro and Thomas W. Baumgarte - Numerical Relativity - Starting From Scratch (2021)Document235 pagesStuart L. Shapiro and Thomas W. Baumgarte - Numerical Relativity - Starting From Scratch (2021)Adrian AlfaroNo ratings yet
- Theraphi Team - Conjugate - Fractal Field Plasma Rejuvenation System PDFDocument41 pagesTheraphi Team - Conjugate - Fractal Field Plasma Rejuvenation System PDFMichael PrzybylskiNo ratings yet
- Speed of LightDocument21 pagesSpeed of LightroopejNo ratings yet
- Advanced Classical Physics, Autumn 2016: Professor Carlo R. Contaldi October 7, 2016Document17 pagesAdvanced Classical Physics, Autumn 2016: Professor Carlo R. Contaldi October 7, 2016Ryan TraversNo ratings yet
- Lesson Plan - Analytical Geometry Part 1Document3 pagesLesson Plan - Analytical Geometry Part 1Ren Ren Billones100% (2)
- La Tech: Physics 201: Practice Exam 1Document8 pagesLa Tech: Physics 201: Practice Exam 1Q_TNo ratings yet
- Introduction To Dynamics of Rigid BodiesDocument12 pagesIntroduction To Dynamics of Rigid BodiesADOBONo ratings yet
- OTTO BLÜH - Ernst Mach As An Historian of PhysicsDocument23 pagesOTTO BLÜH - Ernst Mach As An Historian of PhysicsAndre PhilotNo ratings yet
- Computational Black Holes and General ReDocument18 pagesComputational Black Holes and General ReDiogo MesquitaNo ratings yet
- Exam 1Document6 pagesExam 1api-375738241No ratings yet
- ALC Speed Acceleration PacketDocument42 pagesALC Speed Acceleration PacketJohanne K. AtiwNo ratings yet
- Solved Problems in Mechanics 2016Document28 pagesSolved Problems in Mechanics 2016Debbie TonogNo ratings yet
- Introduction To Quantum Field Theory With Applications To Quantum Gravity 1St Edition Iosif L Buchbinder Full ChapterDocument67 pagesIntroduction To Quantum Field Theory With Applications To Quantum Gravity 1St Edition Iosif L Buchbinder Full Chapterdonald.douglas711100% (4)
- Newtons LawsDocument6 pagesNewtons Lawsapi-239131622No ratings yet
- Exam03 Sol f12Document12 pagesExam03 Sol f12hasib_07No ratings yet
- Roberto Emparan - Black Holes in Higher Dimensions (V)Document27 pagesRoberto Emparan - Black Holes in Higher Dimensions (V)HuntsmithNo ratings yet
- Fiitjee Coimbatore Centre: 10 - Physics - PCMDocument3 pagesFiitjee Coimbatore Centre: 10 - Physics - PCMC.M.M GAMINGNo ratings yet
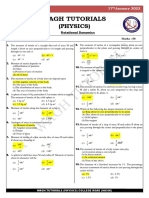
- Mock Test - 98 (17 Jan 2023) Rotational DynamicsDocument1 pageMock Test - 98 (17 Jan 2023) Rotational DynamicsparamNo ratings yet
- Reconstruction of W and Z Bosons Mass: Supervisior: Dr. Ashfaq Ahmad Co-Supervisior: Dr. Teeba Rashid SaadDocument20 pagesReconstruction of W and Z Bosons Mass: Supervisior: Dr. Ashfaq Ahmad Co-Supervisior: Dr. Teeba Rashid SaadManuel Alejandro Rodriguez GiraldoNo ratings yet
- Equilibrium Free Body Diagrams Equations of Equilibrium Equilibrium of Coplanar Concurrent and Parallel Force SystemsDocument20 pagesEquilibrium Free Body Diagrams Equations of Equilibrium Equilibrium of Coplanar Concurrent and Parallel Force SystemsarminNo ratings yet
- Speed Time and DistanceDocument4 pagesSpeed Time and DistancePUNISHERNo ratings yet
- Christoffel Symbols and Special Coordinate Systems: Notes For GR-I - CCDDocument5 pagesChristoffel Symbols and Special Coordinate Systems: Notes For GR-I - CCDahmedsarwarNo ratings yet
- 1st PU Physics November 2014 PDFDocument2 pages1st PU Physics November 2014 PDFPrasad C M100% (3)
- PH 201 - CLASSICAL MECHANICS (Aug. - Dec. 2019) Problem Sheet - 1Document2 pagesPH 201 - CLASSICAL MECHANICS (Aug. - Dec. 2019) Problem Sheet - 1BINODBIHARI PANDANo ratings yet
- 05 Free Fall SVDocument6 pages05 Free Fall SVSamaher AzNo ratings yet
- HP-AN52-4 - Contribution of HP Clocks To The BIH's International Atomic Time Scale (IATS)Document12 pagesHP-AN52-4 - Contribution of HP Clocks To The BIH's International Atomic Time Scale (IATS)sirjole7584No ratings yet
- Kinematics Speed, Velocity, Position, Distance and DisplacementDocument5 pagesKinematics Speed, Velocity, Position, Distance and DisplacementChunesh BhallaNo ratings yet
- Seesaw - 06-11-2019 07:09:15Document6 pagesSeesaw - 06-11-2019 07:09:15WolfieFNNo ratings yet
- Clocks: 10 Class DAY-1Document1 pageClocks: 10 Class DAY-1Ch.Vishnu SuhasNo ratings yet