You might also like
- Historia ControlDocument3 pagesHistoria ControlJesslyn Alejandra Collantes OrbeaNo ratings yet
- Tema 1 OgataDocument12 pagesTema 1 OgataantoniooballegarciaNo ratings yet
- Reseña Histórica de Control AutomáticoDocument3 pagesReseña Histórica de Control AutomáticoCristian SeNo ratings yet
- SISTEMAS DE CONTROL Primer TrabajoDocument14 pagesSISTEMAS DE CONTROL Primer TrabajoeduardoNo ratings yet
- Articulo Criterio de La Estabilidad de NyquistDocument8 pagesArticulo Criterio de La Estabilidad de NyquisttonyNo ratings yet
- Unidad1y2 SISTEMAS DINAMICOSDocument69 pagesUnidad1y2 SISTEMAS DINAMICOSLismar CarolinaNo ratings yet
- Modern Control Engineering Fifth Edition EsDocument23 pagesModern Control Engineering Fifth Edition EsGerardo lopez ruizNo ratings yet
- Ing. de Control ClasicoDocument5 pagesIng. de Control ClasicoAylin MonroyNo ratings yet
- Articulo Criterio de La Estabilidad de NyquistDocument7 pagesArticulo Criterio de La Estabilidad de NyquistLuis Angel Mendez GarciaNo ratings yet
- Introducción al control de procesos industrialesDocument16 pagesIntroducción al control de procesos industrialesLuis Eduardo Alzamora GarciaNo ratings yet
- INTRO Modern Control Engineering 5th Edition .En - Es PDFDocument12 pagesINTRO Modern Control Engineering 5th Edition .En - Es PDFJuan Daniel Guerrero CortesNo ratings yet
- Historia de Los Sistemas de ControlDocument1 pageHistoria de Los Sistemas de Controlluis cordovaNo ratings yet
- Ensayo - Sistemas - de - ControlDocument9 pagesEnsayo - Sistemas - de - ControlcarlosNo ratings yet
- Contenido PDFDocument9 pagesContenido PDFEdwin Tapia PandiaNo ratings yet
- TP Instrumentación y Control - Carmen MartínezDocument13 pagesTP Instrumentación y Control - Carmen MartínezDejanira Martínez BalbuenaNo ratings yet
- Linea Del Tiempo 2Document3 pagesLinea Del Tiempo 2Edith Mariela Rodriguez Ibarra50% (2)
- Luis Aguirre Instrumentación 2Document6 pagesLuis Aguirre Instrumentación 2Luis AguirreNo ratings yet
- Unidad I Sistemas de ControlDocument11 pagesUnidad I Sistemas de ControllenochiNo ratings yet
- Sistemas de ControlDocument15 pagesSistemas de ControlMauricio CarvajalNo ratings yet
- Ilovepdf MergedDocument2 pagesIlovepdf MergedLuis Alfonso Siller ReyesNo ratings yet
- Introducción A La Teoría de ControlDocument18 pagesIntroducción A La Teoría de ControlAndrey MartzNo ratings yet
- Introduccion A ControlDocument20 pagesIntroduccion A ControlMoises MartinezNo ratings yet
- Estado Del Arte Control de NivelDocument34 pagesEstado Del Arte Control de NivelEdwin Javy BorjaNo ratings yet
- Control Clasico y Control ModernoDocument5 pagesControl Clasico y Control ModernoFernando Alberto Salgado Amado100% (1)
- Capitulo 1 OgataDocument13 pagesCapitulo 1 OgataRafael Guadalupe González SolísNo ratings yet
- Unidad I - Tema 3 Variables de Control - CADDocument12 pagesUnidad I - Tema 3 Variables de Control - CADAreas de GradoNo ratings yet
- Introducción a los Sistemas de Control AutomáticoDocument21 pagesIntroducción a los Sistemas de Control AutomáticoJORGE HERRERA AYALANo ratings yet
- Sistemas de Control AutomaticoDocument3 pagesSistemas de Control AutomaticoOscar GarcesNo ratings yet
- Historia de Los Sistemas de ControlDocument11 pagesHistoria de Los Sistemas de ControlAnder VMNo ratings yet
- Clase 01Document28 pagesClase 01Alejandro MaldonadoNo ratings yet
- Historia de Teoría de ControlDocument10 pagesHistoria de Teoría de ControlEDuu Scénariste-RastoneNo ratings yet
- DinamicaDocument8 pagesDinamicaJose FrancoNo ratings yet
- Semana 1 y 2Document21 pagesSemana 1 y 2Alejandra AgudeloNo ratings yet
- Reseña Del Desarrollo de Los Sistemas de ControlDocument3 pagesReseña Del Desarrollo de Los Sistemas de ControlMaritza GuadalupeNo ratings yet
- Introducción Sistemas de Control Lazo Abierto y CerradoDocument13 pagesIntroducción Sistemas de Control Lazo Abierto y CerradosilvanaNo ratings yet
- Control automático en la industriaDocument24 pagesControl automático en la industriaAndré Cristhian Canales Canales MezaNo ratings yet
- Control Automático FundamentosDocument7 pagesControl Automático FundamentosJuve Hernandez RojasNo ratings yet
- CONTROL: ¿QUÉ ES Y CÓMO FUNCIONADocument9 pagesCONTROL: ¿QUÉ ES Y CÓMO FUNCIONAAntonio Elvira SanchezNo ratings yet
- Tarea 1 Dinamica de ProcesosDocument9 pagesTarea 1 Dinamica de ProcesosViviana Bautista NolascoNo ratings yet
- Inversion de Giro de Un MotorDocument14 pagesInversion de Giro de Un MotorAbel Apaza FuentesNo ratings yet
- Sistemas de Control Digital: University of Illinois at ChampaignDocument766 pagesSistemas de Control Digital: University of Illinois at ChampaignJhonny BarcoNo ratings yet
- Curso automatización principiosDocument35 pagesCurso automatización principiosGianmarco Vasquez VergaraNo ratings yet
- Introduccion Sistemas de ControlDocument34 pagesIntroduccion Sistemas de Controlandrea hormazabalNo ratings yet
- LucateroAlvarezMarcoAldair MonografiaDocument10 pagesLucateroAlvarezMarcoAldair MonografiaChristian Jesús Hernández PérezNo ratings yet
- Sistema de Control Moderno PDFDocument18 pagesSistema de Control Moderno PDFMiguel GilNo ratings yet
- Ensayo Sobre La Historia de La Teoria de ControlDocument4 pagesEnsayo Sobre La Historia de La Teoria de ControlDario del AngelNo ratings yet
- Desarrollo de Los Sistemas de ControlDocument18 pagesDesarrollo de Los Sistemas de ControlMargaritta Torres Rdz0% (1)
- Evolución Del Control AutomáticoDocument7 pagesEvolución Del Control Automáticoluis alonsoNo ratings yet
- Modulo 2Document46 pagesModulo 2Rocio MardonesNo ratings yet
- PROYECTO FINAL ROBOTICA. Bola y Barra (3-Mayo)Document16 pagesPROYECTO FINAL ROBOTICA. Bola y Barra (3-Mayo)Néstor CamarilloNo ratings yet
- Introducción A La Teoría de Control.Document12 pagesIntroducción A La Teoría de Control.roberto roblesNo ratings yet
- Arquitectura de Sistemas de ControlDocument17 pagesArquitectura de Sistemas de ControlMaria Celeste Negron100% (2)
- Mecatrónica: modelado, simulación y control de sistemas físicosFrom EverandMecatrónica: modelado, simulación y control de sistemas físicosNo ratings yet
- Sistemas de control en tiempo continuo y discretoFrom EverandSistemas de control en tiempo continuo y discretoRating: 4 out of 5 stars4/5 (2)
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)From EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Rating: 2 out of 5 stars2/5 (1)
- Modal identification using smart mobile sensing unitsFrom EverandModal identification using smart mobile sensing unitsNo ratings yet
- Equilibrios de Fases y Transiciones de Fases: Parte IFrom EverandEquilibrios de Fases y Transiciones de Fases: Parte INo ratings yet
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108From EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Rating: 4.5 out of 5 stars4.5/5 (8)
- Control automático aplicado: Prácticas de laboratorio 2da. EdiciónFrom EverandControl automático aplicado: Prácticas de laboratorio 2da. EdiciónRating: 3.5 out of 5 stars3.5/5 (5)
- UF1026 - Caracterización de procesos e instalaciones frigoríficasFrom EverandUF1026 - Caracterización de procesos e instalaciones frigoríficasRating: 4 out of 5 stars4/5 (1)
- ArduinoDocument3 pagesArduinoAdrian SalazarNo ratings yet
- MicrocontroladorDocument47 pagesMicrocontroladorAdrian SalazarNo ratings yet
- Estructura de ProgramaDocument28 pagesEstructura de ProgramaAdrian SalazarNo ratings yet
- 29 Sistemas NumericosDocument4 pages29 Sistemas NumericosmaritzalizethsNo ratings yet
- Mapa MentalDocument2 pagesMapa MentalAdrian SalazarNo ratings yet
- 29 Sistemas NumericosDocument4 pages29 Sistemas NumericosmaritzalizethsNo ratings yet
- 29 Sistemas NumericosDocument4 pages29 Sistemas NumericosmaritzalizethsNo ratings yet
- Sistemas de LubricaciónDocument6 pagesSistemas de LubricaciónAdrian SalazarNo ratings yet
- Ejemplo 1Document2 pagesEjemplo 1Adrian SalazarNo ratings yet
- Elevado RDocument3 pagesElevado RAdrian SalazarNo ratings yet
- Transistor IGBTDocument16 pagesTransistor IGBTAdrian Salazar100% (1)
- Unidad 5 Sistemas PolifasicosDocument18 pagesUnidad 5 Sistemas PolifasicosAdrian SalazarNo ratings yet
- MoldeoDocument2 pagesMoldeoAdrian SalazarNo ratings yet
- Apuntes Sobre La Teoria de La Imagen (Revisar)Document244 pagesApuntes Sobre La Teoria de La Imagen (Revisar)cloroformus100% (1)
- PCA Distinction 1 1-2 BachDocument95 pagesPCA Distinction 1 1-2 BachNatalia MuñozNo ratings yet
- Funciones Propia de La EnfermeríaDocument7 pagesFunciones Propia de La EnfermeríaLuis VillegasNo ratings yet
- Internado UJAT 2007-2008Document20 pagesInternado UJAT 2007-2008Rommel E. AlvaradoNo ratings yet
- La Palabra Como Signo Lingüístico Clasificación de PalabrasDocument6 pagesLa Palabra Como Signo Lingüístico Clasificación de PalabrasYenner AlegreNo ratings yet
- Microsistemas y Nanotecnologías AplicacionesDocument5 pagesMicrosistemas y Nanotecnologías Aplicacionesjairo muro hernandezNo ratings yet
- El Proceso Terapeutico La Sesion InicialDocument18 pagesEl Proceso Terapeutico La Sesion InicialJullieMaterano100% (1)
- Orientaciones para La Planificación Curricular Ept 2020Document18 pagesOrientaciones para La Planificación Curricular Ept 2020Hildebrandt ManzaNo ratings yet
- Byron Morales - Primera EvaluaciónDocument11 pagesByron Morales - Primera EvaluaciónByron Ernesto Morales GarciaNo ratings yet
- Guía de Lectura - Shapin, La Casa de Los ExperimentosDocument3 pagesGuía de Lectura - Shapin, La Casa de Los ExperimentosWilliam HarrisNo ratings yet
- Fundamentos de la EBADocument17 pagesFundamentos de la EBAJorge Luis Luna AvilesNo ratings yet
- ACTITUD DOCENTE FRENTE A LA DISLEXIA (Velásquez Sánchez, Áles Gustavo)Document4 pagesACTITUD DOCENTE FRENTE A LA DISLEXIA (Velásquez Sánchez, Áles Gustavo)Alex Gustavo Velasquez SanchezNo ratings yet
- Riee 7,1Document169 pagesRiee 7,1Huayna Practica AlegriaNo ratings yet
- 2Document7 pages2Gonzalez Martinez JesusNo ratings yet
- Documento 4Document18 pagesDocumento 4elizabeth mazo pereNo ratings yet
- Khan AcademyDocument3 pagesKhan AcademykatheryneNo ratings yet
- Ensayo de Las Estrategias de EnseñanzaDocument7 pagesEnsayo de Las Estrategias de EnseñanzaFlor Orquidea Batista SuárezNo ratings yet
- Manual Instruccional ENSAYO APA 4-23Document42 pagesManual Instruccional ENSAYO APA 4-23poche719No ratings yet
- Ejemplo de JournalDocument6 pagesEjemplo de JournalThalia CQNo ratings yet
- Cuadro ComparativoDocument9 pagesCuadro Comparativoleidy LozanoNo ratings yet
- Módulo Taller de Investigación. 2022-IiDocument16 pagesMódulo Taller de Investigación. 2022-IiAna Cristina SellericoNo ratings yet
- Tema 5 - Marco TeoricoDocument10 pagesTema 5 - Marco TeoricoseoanereyesdiegoNo ratings yet
- Tratamiento Neuropsicologico TDAH Preescolares Funcion EjecutivaDocument10 pagesTratamiento Neuropsicologico TDAH Preescolares Funcion EjecutivaCARLOS ANDRES TORONo ratings yet
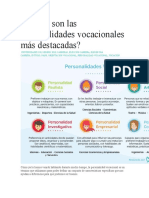
- Personalidad VocacionalDocument2 pagesPersonalidad VocacionalHernando Zamora PerezNo ratings yet
- Métodos de Investigación PsicológicaDocument8 pagesMétodos de Investigación PsicológicaCesar100% (2)
- Los Medios de ComunicaciónDocument3 pagesLos Medios de ComunicaciónEric CastilloNo ratings yet
- Actividad 4 Modelos Tempranos en El Estudio CognicionDocument5 pagesActividad 4 Modelos Tempranos en El Estudio CognicionLAURA CAROLINA JIMENEZ ARRIETANo ratings yet
- Anteproyecto-Geraldine Sotomayor BazanDocument58 pagesAnteproyecto-Geraldine Sotomayor BazanChris ACNo ratings yet
- Edah Escala para La Evaluacion Del TrastDocument4 pagesEdah Escala para La Evaluacion Del TrastLeo Gélvez RodNo ratings yet
- Ernst CassirerDocument27 pagesErnst CassirerFrancis AlarcónNo ratings yet