You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Electrical Power and Energy Systems: Hamed Dashti, Mahdi Davarpanah, Majid Sanaye-Pasand, Hamid LesaniDocument9 pagesElectrical Power and Energy Systems: Hamed Dashti, Mahdi Davarpanah, Majid Sanaye-Pasand, Hamid LesaniSunil KumarNo ratings yet
- Harmonic Distortion in Power Stations Due To FerroresonanceDocument4 pagesHarmonic Distortion in Power Stations Due To FerroresonanceSunil KumarNo ratings yet
- B.tech Syllabus URR-18Document118 pagesB.tech Syllabus URR-18Sunil Kumar100% (1)
- Utilization of Electrical Energy and Traction - J. B. Gupta, R. Manglik and R. ManglikDocument94 pagesUtilization of Electrical Energy and Traction - J. B. Gupta, R. Manglik and R. Manglik5544871720% (15)
- A Comparative Study of Harmonic Current Identification For Active Power FilterDocument6 pagesA Comparative Study of Harmonic Current Identification For Active Power FilterSunil KumarNo ratings yet
- Discrimination of Internal Fault Current and Inrush Current in A Power Transformer Using Empirical Wavelet TransformDocument6 pagesDiscrimination of Internal Fault Current and Inrush Current in A Power Transformer Using Empirical Wavelet TransformSunil KumarNo ratings yet
- Modeling and Simulation of 6-Pulse Rectifier Drives With PDFDocument6 pagesModeling and Simulation of 6-Pulse Rectifier Drives With PDFSunil KumarNo ratings yet
- Harmonic Compensation of Commercial and Industrial Power SystemsDocument6 pagesHarmonic Compensation of Commercial and Industrial Power SystemsSunil KumarNo ratings yet
- HM of V&i Ingrid Connected MicrogridsDocument6 pagesHM of V&i Ingrid Connected MicrogridsSunil KumarNo ratings yet
- HMT For IMprov of Power Quality of Adj DrivesDocument10 pagesHMT For IMprov of Power Quality of Adj DrivesSunil KumarNo ratings yet
- Effect of Electrode Regulation System On Arc Parameters in Furnace Operation PDFDocument5 pagesEffect of Electrode Regulation System On Arc Parameters in Furnace Operation PDFSunil KumarNo ratings yet
- All About HarmonicsDocument240 pagesAll About HarmonicsKhushal KharadeNo ratings yet
- Relieving Letter - 2Document1 pageRelieving Letter - 2Sunil KumarNo ratings yet
- Effectiveness of Harmonic Mitigation Equipment For Commercial Office BuildingsDocument7 pagesEffectiveness of Harmonic Mitigation Equipment For Commercial Office BuildingsSunil KumarNo ratings yet
- Ee 1991 PDFDocument7 pagesEe 1991 PDFSunil KumarNo ratings yet
- Electric Arc Furnace-Paper PDFDocument5 pagesElectric Arc Furnace-Paper PDFSunil KumarNo ratings yet
- Evaluation of Cascade-Multilevel-Converter-Based STATCOM For Arc Furnace Flicker Mitigation PDFDocument8 pagesEvaluation of Cascade-Multilevel-Converter-Based STATCOM For Arc Furnace Flicker Mitigation PDFSunil KumarNo ratings yet
- A Hybrid Simulation Model of AC Electric Arc Furnace PDFDocument6 pagesA Hybrid Simulation Model of AC Electric Arc Furnace PDFSunil KumarNo ratings yet
- A Wavelet-Based Algorithm For Power Quality Detection in Electric Arc Furnace PDFDocument6 pagesA Wavelet-Based Algorithm For Power Quality Detection in Electric Arc Furnace PDFSunil KumarNo ratings yet
- Application of A D-STATCOM To Mitigate Arc Furnaces Power Quality Problems PDFDocument6 pagesApplication of A D-STATCOM To Mitigate Arc Furnaces Power Quality Problems PDFSunil KumarNo ratings yet
- Distribute Harmonic Mitigation Solutions For Best Results: V Ihxx Eq. 1Document6 pagesDistribute Harmonic Mitigation Solutions For Best Results: V Ihxx Eq. 1Sunil KumarNo ratings yet
- A New Instantaneous Power Theory-Based Three-Phase Active Power FilterDocument6 pagesA New Instantaneous Power Theory-Based Three-Phase Active Power FilterSunil KumarNo ratings yet
- Power SystemDocument23 pagesPower SystemM VetriselviNo ratings yet
- Introduction To WaveletDocument26 pagesIntroduction To WaveletSunil KumarNo ratings yet
- Power Quality BookletDocument14 pagesPower Quality BookletmarinflorentinaoanaNo ratings yet
- Virtual Harmonic Analyser in LabVIEWDocument6 pagesVirtual Harmonic Analyser in LabVIEWBiljana RisteskaNo ratings yet
- Harmonic Treatment in Industrial PowerDocument115 pagesHarmonic Treatment in Industrial PowerNeranjan LihinikumaraNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Digital Transformation of Health Quality Services in The Healthcare Industry During Disruption and Society 5.0 Era: A Literature ReviewDocument6 pagesDigital Transformation of Health Quality Services in The Healthcare Industry During Disruption and Society 5.0 Era: A Literature ReviewAchmad SolechanNo ratings yet
- Motor Controls Troubleshooting of Electric MotorsDocument34 pagesMotor Controls Troubleshooting of Electric MotorsAdil RezoukNo ratings yet
- GIS Siemens Catalogo 36kVDocument16 pagesGIS Siemens Catalogo 36kVCristian Rene Orozco PerezNo ratings yet
- Case Study Analysis of Rubco Huat PVT LTDDocument16 pagesCase Study Analysis of Rubco Huat PVT LTDUma MaheswariNo ratings yet
- Singapore - 202304 - Generative Recommendation - Towards Next-Generation Recommender ParadigmDocument10 pagesSingapore - 202304 - Generative Recommendation - Towards Next-Generation Recommender Paradigmcynorr rainNo ratings yet
- Smartdrive Premier System: T E C H N I C A L C A T A L O GDocument52 pagesSmartdrive Premier System: T E C H N I C A L C A T A L O GKrzysztof Bręk100% (1)
- Indian and International Transmission Line Construction CompaniesDocument10 pagesIndian and International Transmission Line Construction CompaniesAkd DeshmukhNo ratings yet
- Wind Energy SyllabusDocument3 pagesWind Energy SyllabusShivanand ArwatNo ratings yet
- LT3 Lt3se00mDocument2 pagesLT3 Lt3se00mLucian SinpetruNo ratings yet
- Nokia Siemens Networks Information Browser Installation and Setup GuideDocument16 pagesNokia Siemens Networks Information Browser Installation and Setup GuideФантомас МихалычNo ratings yet
- CyberArk - PrivilegeCloud - Implementation DocumentDocument45 pagesCyberArk - PrivilegeCloud - Implementation DocumentramuNo ratings yet
- 'Techno-Graphy' and ' Porno-Logy': An Analytical Study of Relationship Between The TwoDocument8 pages'Techno-Graphy' and ' Porno-Logy': An Analytical Study of Relationship Between The TwoTJPRC PublicationsNo ratings yet
- Project Management ProcessesDocument36 pagesProject Management ProcessesZainNo ratings yet
- PS SB QS Deploy Tenable - SCDocument7 pagesPS SB QS Deploy Tenable - SCTiago PeNo ratings yet
- Manual de Instalacion PC5108Document2 pagesManual de Instalacion PC5108Jairo Antonio Orellano ArbelaezNo ratings yet
- Signal Circuit EMI: UnwantedDocument4 pagesSignal Circuit EMI: UnwantedmarichuNo ratings yet
- Argo Flux WhitepaperDocument16 pagesArgo Flux WhitepaperthoronlithNo ratings yet
- 234 - Cyber Swerve ProjectDocument20 pages234 - Cyber Swerve ProjectChloe MoNo ratings yet
- Lecture Thirteen System Security AuditDocument12 pagesLecture Thirteen System Security AuditianNo ratings yet
- BP2882 User's Guide - 012 - 01aDocument101 pagesBP2882 User's Guide - 012 - 01aterbanNo ratings yet
- What Is Burst in GSM and Burst Types in GSMDocument2 pagesWhat Is Burst in GSM and Burst Types in GSMAbid Ur RehmanNo ratings yet
- Product Comparison: HP Laserjet Enterprise M605Dn (E6B70A) HP Laserjet Enterprise M806Dn Printer (Cz244A)Document3 pagesProduct Comparison: HP Laserjet Enterprise M605Dn (E6B70A) HP Laserjet Enterprise M806Dn Printer (Cz244A)ANDRES VILLANo ratings yet
- An Introduction To The CISSP & SSCP Certifications: Wilfred L. Camilleri, CISSPDocument49 pagesAn Introduction To The CISSP & SSCP Certifications: Wilfred L. Camilleri, CISSPchirag2beNo ratings yet
- B. Inggris XiDocument6 pagesB. Inggris XiAnita LestariNo ratings yet
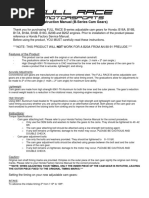
- Cam Gears Install PDFDocument2 pagesCam Gears Install PDFArshed RosalesNo ratings yet
- Ind 140Document71 pagesInd 140Krushik DhadukNo ratings yet
- Project Report On Online Railway Management SystemDocument5 pagesProject Report On Online Railway Management SystemMaxwellNo ratings yet
- Chapter 2 - C Programming LanguageDocument26 pagesChapter 2 - C Programming LanguageJobet Reyes PalomaNo ratings yet
- Sample Email Policy TemplateDocument7 pagesSample Email Policy TemplateSonia Vinod100% (1)
- RS232 Serial Cable Pinout 1Document2 pagesRS232 Serial Cable Pinout 1Perry Bangun100% (1)