You might also like
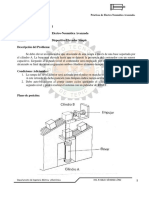
- ITT - Ejercicios ElectroNeumatica Avanzada v2Document7 pagesITT - Ejercicios ElectroNeumatica Avanzada v2MonicaFloresNo ratings yet
- Ejercicios Ladder 2018Document15 pagesEjercicios Ladder 2018Leobardo M. García Cruz50% (2)
- Llenado y Vaciado de TanquesDocument29 pagesLlenado y Vaciado de TanquesEdwin JavierNo ratings yet
- Bloque de Ejercicios 03 Ejercicios Con Contactores PDFDocument2 pagesBloque de Ejercicios 03 Ejercicios Con Contactores PDFMark Antony Fernández AguilarNo ratings yet
- EJERCICIO Mezclador de PinturaDocument1 pageEJERCICIO Mezclador de PinturaAnonymous 0yZ6uqNo ratings yet
- Practica PLC Taller 1Document23 pagesPractica PLC Taller 1jorge perezNo ratings yet
- Ejercicios Resueltos de PLCS y SensoresDocument16 pagesEjercicios Resueltos de PLCS y SensoresGonzalo GrimaldiNo ratings yet
- Tema5 Ejercicios GrafcetDocument32 pagesTema5 Ejercicios GrafcetKoko EsclntNo ratings yet
- Ejercicios de PLCDocument25 pagesEjercicios de PLCCarolina Solis0% (2)
- Ejercicios Zelio Soft 2Document8 pagesEjercicios Zelio Soft 2Juan Carlos Villagrán100% (2)
- SIERRADocument1 pageSIERRAJovani DiazNo ratings yet
- Circutos NeuamticosDocument21 pagesCircutos NeuamticosAnonymous SegCAngVY5100% (1)
- Ejercicio MezcladoraDocument13 pagesEjercicio MezcladoraDiego Martinez TrivesNo ratings yet
- Control Secuencial de Procesos (AP-IsP)Document4 pagesControl Secuencial de Procesos (AP-IsP)Lalo FrancoNo ratings yet
- Tarea 7 Ejercicios Basicos ElectroneumaticaDocument10 pagesTarea 7 Ejercicios Basicos ElectroneumaticaJorge Luis SagñayNo ratings yet
- Programacion para Arranque de Motores Con PLC LOGODocument10 pagesProgramacion para Arranque de Motores Con PLC LOGOMarcos Calixto LopezNo ratings yet
- Ejercicios - Automatizacion 2020Document6 pagesEjercicios - Automatizacion 2020simurwen100% (2)
- Evaluacion de PLCDocument17 pagesEvaluacion de PLCJohn Fredy Martínez CardonaNo ratings yet
- Presentacion CADE SimuDocument45 pagesPresentacion CADE SimuRubén Arribas MateoNo ratings yet
- ProblemasDocument77 pagesProblemasjonathan41110100% (1)
- Ejercicios de Programación de PLCDocument5 pagesEjercicios de Programación de PLCWilmer Yesid Granados JaimesNo ratings yet
- Mezclado RaDocument13 pagesMezclado Rarufinius100% (2)
- T2 - Ejercicios Grafcet 2Document6 pagesT2 - Ejercicios Grafcet 2rufiniusNo ratings yet
- Conexión SteinmetzDocument4 pagesConexión Steinmetzramos valdan murcielagoNo ratings yet
- Ejercicios de ElectroneumaticaDocument3 pagesEjercicios de ElectroneumaticaJoe TguerraNo ratings yet
- Ejercicio PLCDocument26 pagesEjercicio PLCCarlos Badilla0% (1)
- 7.1 Problemas - Grafcet - Tarea PDFDocument3 pages7.1 Problemas - Grafcet - Tarea PDFAlexander TelloNo ratings yet
- GRAFCETTareaDocument7 pagesGRAFCETTareaAlejoCarreraNo ratings yet
- Ejercicios MM TemporizadoresContadoresDocument5 pagesEjercicios MM TemporizadoresContadoresAndres NogalesNo ratings yet
- m3 Practica 1 Hector ApazaDocument5 pagesm3 Practica 1 Hector ApazaHector Felipe Apaza Vila100% (1)
- PRACTICA 5 GRAFCET I. Bascula Industrial de Precisión. Ejercicio 1. Descripción Del ProcesoDocument6 pagesPRACTICA 5 GRAFCET I. Bascula Industrial de Precisión. Ejercicio 1. Descripción Del ProcesoMai RamirezNo ratings yet
- Reporte 1 Mesa SemiautomáticaDocument13 pagesReporte 1 Mesa Semiautomáticanorberto soto jacoboNo ratings yet
- Proyecto Final de Instrumentacion 2Document12 pagesProyecto Final de Instrumentacion 2Dario Javier Tubon TiteNo ratings yet
- Ejercicios Señales Digitales 2.Document7 pagesEjercicios Señales Digitales 2.JesúsTelloGarciaNo ratings yet
- Lab 06 - HMI - Diseño HMI - PV 600 PlusDocument8 pagesLab 06 - HMI - Diseño HMI - PV 600 PlusJoel CoaguilaNo ratings yet
- Ejercicios Logo 1Document2 pagesEjercicios Logo 1Jose CedenoNo ratings yet
- Ejercicios PLC PDFDocument21 pagesEjercicios PLC PDFJose Manuel Godoy Escribar67% (3)
- Practica Graffcet LaderDocument8 pagesPractica Graffcet LaderPaula Andrea CastañedaNo ratings yet
- 2-SFC - Diagrama-de-Estados Eonce CorrectionDocument24 pages2-SFC - Diagrama-de-Estados Eonce CorrectionLuc AusterNo ratings yet
- Ejercicios de Grafcet - AdaptadosDocument54 pagesEjercicios de Grafcet - AdaptadosAsier Sabin De Ormaetxea Garaizar100% (1)
- Máquina Envasadora de PinturaFINDocument15 pagesMáquina Envasadora de PinturaFINJoselo RamirezNo ratings yet
- Redes de Petri - Problemas - II PDFDocument15 pagesRedes de Petri - Problemas - II PDFalejandro balagueraNo ratings yet
- Lab 1 Introducción A La Programación y Funciones Lógicas SFDocument13 pagesLab 1 Introducción A La Programación y Funciones Lógicas SFSantiago FuentesNo ratings yet
- Problemas de AutomatizaciónDocument7 pagesProblemas de AutomatizaciónKarol GuzmanNo ratings yet
- Lab 06 - HMI - Diseño HMI - PV 600 PlusDocument26 pagesLab 06 - HMI - Diseño HMI - PV 600 PlusCarlos Eduardo Vásquez BolañosNo ratings yet
- Ejercicios T02 PDFDocument19 pagesEjercicios T02 PDFAlberto Pardo CerdanNo ratings yet
- Redes de Petri - ProblemasDocument14 pagesRedes de Petri - ProblemasHernanBolotchiNo ratings yet
- Siemens Logo Soft Medio - Formación para La Industria 4.0Document6 pagesSiemens Logo Soft Medio - Formación para La Industria 4.0Gustavo CircelliNo ratings yet
- Inf5 - 9060 - Amaguaña Chingal Conlago FarinangoDocument16 pagesInf5 - 9060 - Amaguaña Chingal Conlago FarinangoJean AlcoZerNo ratings yet
- Avance 09 - Control y Automatizacion - Informe FinalDocument11 pagesAvance 09 - Control y Automatizacion - Informe FinalFernando HinojosaNo ratings yet
- Programación Por Bloques - FupDocument8 pagesProgramación Por Bloques - FupAngela Hernandez ValenciaNo ratings yet
- PrácticasPLC AlejandroDocument32 pagesPrácticasPLC AlejandroAvicii AviciiNo ratings yet
- Ejercicios Proyectos-Cpu-S7-1200Document21 pagesEjercicios Proyectos-Cpu-S7-1200Jose Manuel Moa Perez100% (3)
- Segunda ParteDocument6 pagesSegunda Partestephaniegl2011No ratings yet
- Control de Secuencia de Los Tres Cilindros de AireDocument4 pagesControl de Secuencia de Los Tres Cilindros de AireIvan Mamani CruzNo ratings yet
- Asignacion 10% Segundo CorteDocument11 pagesAsignacion 10% Segundo CorteRicardo Campos LandaetaNo ratings yet
- Practica 5Document6 pagesPractica 5Max MendosaNo ratings yet
- Practica 3Document12 pagesPractica 3jhonatan0% (1)
- Planificación de Puesta en Marcha Estación MPS DISTRIBUCIÓNDocument9 pagesPlanificación de Puesta en Marcha Estación MPS DISTRIBUCIÓNAbraham Fuentes MedinaNo ratings yet
- Laboratorio de Instrumentacion #4Document8 pagesLaboratorio de Instrumentacion #4MARIA VALENTINA HIDALGO CARDENASNo ratings yet
- Nomina Congreso RevisadaDocument7 pagesNomina Congreso RevisadaEdgar AlmachiNo ratings yet
- Modbus Con Plc's s7 1200 - OkDocument52 pagesModbus Con Plc's s7 1200 - OkErik Mora100% (1)
- CAPITULO-I MatlabDocument2 pagesCAPITULO-I MatlabLenin JiménezNo ratings yet
- Simulador MecatronicaDocument1 pageSimulador MecatronicaLenin JiménezNo ratings yet
- Diagram A Bloques GalgaDocument1 pageDiagram A Bloques GalgaLenin JiménezNo ratings yet
- Protocolos de ComunicacionDocument3 pagesProtocolos de ComunicacionLenin JiménezNo ratings yet
- Capitulo VDocument2 pagesCapitulo VLenin JiménezNo ratings yet
- Teoria de Electronica de PotenciaDocument17 pagesTeoria de Electronica de PotenciaLenin JiménezNo ratings yet
- PRÃ CTICAS 1 Intrumentaciã N PDFDocument1 pagePRÃ CTICAS 1 Intrumentaciã N PDFLenin JiménezNo ratings yet
- CruzDocument1 pageCruzLenin JiménezNo ratings yet
- Elementos Pasivos en ElectronicaDocument13 pagesElementos Pasivos en ElectronicaLenin JiménezNo ratings yet
- Guía de Seguridad Laboratorio MecatrònicaDocument3 pagesGuía de Seguridad Laboratorio MecatrònicaEdú CárdenasNo ratings yet
- Formatos APA para Informes 2017Document3 pagesFormatos APA para Informes 2017Lenin JiménezNo ratings yet
- Conversores Controlados 1Document20 pagesConversores Controlados 1David OleasNo ratings yet
- Teoria de Hoja de ProcesoDocument2 pagesTeoria de Hoja de ProcesoLenin JiménezNo ratings yet
- Formatos APA para Informes 2017Document3 pagesFormatos APA para Informes 2017Lenin JiménezNo ratings yet
- DecG3 10Document25 pagesDecG3 10Kike DavilaNo ratings yet
- Formato DeberesDocument2 pagesFormato DeberesLenin JiménezNo ratings yet
- Aparatos de ProtecciónDocument47 pagesAparatos de ProtecciónFernando GuerreroNo ratings yet
- Tarea 1 SE II Unidad Mierxoles 15 06 2016Document1 pageTarea 1 SE II Unidad Mierxoles 15 06 2016Lenin JiménezNo ratings yet
- Caso NaturaDocument6 pagesCaso NaturaKëlly MorälesNo ratings yet
- Seminario II - Cuestionario 2Document3 pagesSeminario II - Cuestionario 2usmpusmpusmpNo ratings yet
- Precaso 4 IndividualDocument5 pagesPrecaso 4 Individualluis antonio barquin pacajoNo ratings yet
- Dilemas Éticos ProfesionalesDocument2 pagesDilemas Éticos ProfesionalesKaren50% (2)
- Matrices Ambito EmpresarialDocument23 pagesMatrices Ambito EmpresarialJanny Andrea Beltran NaizirNo ratings yet
- Vitaminas y Minerales E (IC-970-98)Document35 pagesVitaminas y Minerales E (IC-970-98)Chad PateNo ratings yet
- Cuestionario 1Document3 pagesCuestionario 1AlexLópezMtzNo ratings yet
- Práctica 5 Halogenación de ParafinasDocument3 pagesPráctica 5 Halogenación de ParafinasRandy ChanatasiNo ratings yet
- Herramientas de Inteligencia Comercial PDFDocument40 pagesHerramientas de Inteligencia Comercial PDFnayshaNo ratings yet
- SepsisDocument34 pagesSepsisDiana Merino Flores100% (1)
- DERMATOLOGÍADocument7 pagesDERMATOLOGÍAErickHerediaSánchezNo ratings yet
- La Gallinita CiegaDocument2 pagesLa Gallinita Ciegadsgdfghf100% (2)
- Jorge Maradiaga - Marco MetodologicoDocument6 pagesJorge Maradiaga - Marco MetodologicoJorge Luis Maradiaga MesaNo ratings yet
- Ses-Mart-Tut-La Importancia de La Autonomía para La Toma DecisionesDocument5 pagesSes-Mart-Tut-La Importancia de La Autonomía para La Toma DecisionesOscar ZapataNo ratings yet
- Presentacion FCTDocument15 pagesPresentacion FCTCARLOSNo ratings yet
- MIERCOLES B - Explicamos Los Beneficios de Los Aparatps Tecnológicos A La ComunicaciónDocument8 pagesMIERCOLES B - Explicamos Los Beneficios de Los Aparatps Tecnológicos A La ComunicaciónVilma Benavides DiazNo ratings yet
- Cuadro ComparativoDocument5 pagesCuadro ComparativoDavid GonzalezNo ratings yet
- Paper Auditoria Sistemas 5k1 Gimenez Lazzos Morardo YunesDocument10 pagesPaper Auditoria Sistemas 5k1 Gimenez Lazzos Morardo YunesNicolas LazzosNo ratings yet
- Medina Et Al. 2015. Aves y Mamíferos Páramo de RabanalDocument14 pagesMedina Et Al. 2015. Aves y Mamíferos Páramo de RabanalWilderson MedinaNo ratings yet
- Carta Notarial - IkergustDocument2 pagesCarta Notarial - Ikergustp_danielito88% (16)
- Fast Fan Page Profits EspanolDocument24 pagesFast Fan Page Profits EspanolRPG Sistemas SistemasNo ratings yet
- Tweeen Clean 2205Document4 pagesTweeen Clean 2205Arslan HussainNo ratings yet
- PitDocument223 pagesPitAlbergue IshincaNo ratings yet
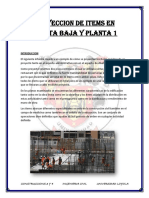
- Proyeccion de Items en Planta Baja y Planta 1Document6 pagesProyeccion de Items en Planta Baja y Planta 1Daniel AguilarNo ratings yet
- 1.0. Memoria Descriptiva AcobambaDocument34 pages1.0. Memoria Descriptiva AcobambaEvelyn Jesus RiosNo ratings yet
- Cuestionario de Equilibrio de FasesDocument6 pagesCuestionario de Equilibrio de FasesMaria Mercedes Cubilete RamonNo ratings yet
- CARTILLA La Senda Del Felino ULTIMA VERSIÓN PARA COMUNICADORES DE EPM Y CORNAREDocument32 pagesCARTILLA La Senda Del Felino ULTIMA VERSIÓN PARA COMUNICADORES DE EPM Y CORNAREJuan F Alzate AguirreNo ratings yet
- Recogemos Información Sobre El Folclore y La ModernidadDocument10 pagesRecogemos Información Sobre El Folclore y La ModernidadmariaNo ratings yet
- NT 011 2021 S Pronunciamiento SDocument2 pagesNT 011 2021 S Pronunciamiento SJosue Alfredo Moreno Espa�a100% (1)
- Cobertura 1629204981135 1629204981677Document4 pagesCobertura 1629204981135 1629204981677Belen HerrleinNo ratings yet