You might also like
- Curacion Por El Pensamiento-NoesiterapiaDocument169 pagesCuracion Por El Pensamiento-NoesiterapiaTeresa Rangel100% (9)
- Garcia - omar.Act.3.Poniendo en Práctica El Pragmatismo Educativo y El Modelo MontessoriDocument8 pagesGarcia - omar.Act.3.Poniendo en Práctica El Pragmatismo Educativo y El Modelo MontessoriOmaar Gaarciaa Diaaz100% (2)
- DentalDocument20 pagesDentalKriizthiian HuiisaNo ratings yet
- Reducc de Pérdidas Aprob Web PDFDocument34 pagesReducc de Pérdidas Aprob Web PDFKriizthiian HuiisaNo ratings yet
- Estructuras Decision Semana 03Document8 pagesEstructuras Decision Semana 03Kriizthiian HuiisaNo ratings yet
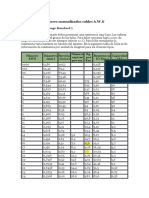
- Valores Normalizados Cables ADocument6 pagesValores Normalizados Cables AYeferson RodriguezNo ratings yet
- 8.5 Calculo Enlace 2 PDFDocument13 pages8.5 Calculo Enlace 2 PDFKriizthiian HuiisaNo ratings yet
- EcuacionesDiferencialesCaracterísticasDocument14 pagesEcuacionesDiferencialesCaracterísticasKriizthiian HuiisaNo ratings yet
- FTI-Factores Afectan ComunicacionDocument14 pagesFTI-Factores Afectan ComunicacionDayana ValentinaNo ratings yet
- Sistmas D TX Fbra OptcaDocument39 pagesSistmas D TX Fbra OptcaKriizthiian HuiisaNo ratings yet
- CALCULO Sat ModificadoDocument13 pagesCALCULO Sat ModificadoKriizthiian HuiisaNo ratings yet
- Cerradura Electrónica Operada A DistanciaDocument7 pagesCerradura Electrónica Operada A DistanciaKriizthiian HuiisaNo ratings yet
- Contador Fotoelectrico de ObjetosDocument22 pagesContador Fotoelectrico de ObjetosIvan Valenzuela0% (2)
- Corte Penal InternacionalDocument3 pagesCorte Penal InternacionalKriizthiian HuiisaNo ratings yet
- Leyes de KirchhoffDocument6 pagesLeyes de KirchhoffflavioscrNo ratings yet
- Circuito Integrado TTL 74153Document3 pagesCircuito Integrado TTL 74153Jhoan Alexander Chunga OrdinolaNo ratings yet
- Modelamiento de Una Planta de ControllDocument9 pagesModelamiento de Una Planta de ControllKriizthiian HuiisaNo ratings yet
- Parador Con Amplificador Operacional 2012Document8 pagesParador Con Amplificador Operacional 2012Clau SanPerNo ratings yet
- Trabajotransfromada Inversa de Laplace Fourier y ZDocument14 pagesTrabajotransfromada Inversa de Laplace Fourier y ZKriizthiian HuiisaNo ratings yet
- 06-07 Practica 1 AnalogicaDocument7 pages06-07 Practica 1 AnalogicaJade AguayoNo ratings yet
- Motores eléctricos aplicaciones principiosDocument23 pagesMotores eléctricos aplicaciones principiosMarcelo De Jesús DelgadoNo ratings yet
- Alarma luminosa DIYDocument14 pagesAlarma luminosa DIYKriizthiian HuiisaNo ratings yet
- Circuito Derivador CaliDocument12 pagesCircuito Derivador CaliKriizthiian HuiisaNo ratings yet
- 06-07 Practica 1 AnalogicaDocument7 pages06-07 Practica 1 AnalogicaJade AguayoNo ratings yet
- Modelamiento de Una Planta de Control de Nivel Mediante Identificación No Paramétrica Modeling A Level Control Plant by Non-Parametric IdentificationDocument13 pagesModelamiento de Una Planta de Control de Nivel Mediante Identificación No Paramétrica Modeling A Level Control Plant by Non-Parametric IdentificationKriizthiian HuiisaNo ratings yet
- IntroduccionDocument10 pagesIntroduccionJessica OsorioNo ratings yet
- Modelamiento de Una Planta de Control de Nivel Mediante Identificación No Paramétrica Modeling A Level Control Plant by Non-Parametric IdentificationDocument13 pagesModelamiento de Una Planta de Control de Nivel Mediante Identificación No Paramétrica Modeling A Level Control Plant by Non-Parametric IdentificationKriizthiian HuiisaNo ratings yet
- 8 Transistores de Efecto CampoDocument31 pages8 Transistores de Efecto CampoKriizthiian HuiisaNo ratings yet
- Ejemplo RadioenlaceDocument17 pagesEjemplo RadioenlaceKriizthiian HuiisaNo ratings yet
- Modelamiento de Una PlantaDocument13 pagesModelamiento de Una PlantaKriizthiian HuiisaNo ratings yet
- Informe 3 Jfet y MosfetDocument11 pagesInforme 3 Jfet y MosfetKriizthiian HuiisaNo ratings yet
- Probabilidad y Teoría de ConjuntosDocument25 pagesProbabilidad y Teoría de ConjuntosAntonella ManacordaNo ratings yet
- Plan Mejoramiento - Geometría 8°Document3 pagesPlan Mejoramiento - Geometría 8°Ana Bedoya DíazNo ratings yet
- Morfi - Viaje Indios DiarioDocument41 pagesMorfi - Viaje Indios Diariocarlos montiel67% (3)
- Semana X - Estructuras Básicas de Programación - RepetitivasDocument26 pagesSemana X - Estructuras Básicas de Programación - RepetitivasJessieNo ratings yet
- Aplicaciones de SilicioDocument295 pagesAplicaciones de Silicioliliana_naclNo ratings yet
- Las 7P Del MarketingDocument17 pagesLas 7P Del MarketingDiego Javier ChungandroNo ratings yet
- Paradigmas EICDocument9 pagesParadigmas EICJavier MartinNo ratings yet
- Las FARC-EP. El PCCC y El Movimiento BolivarianoDocument17 pagesLas FARC-EP. El PCCC y El Movimiento BolivarianoJorge Andrés Cortés Molina100% (1)
- Ciencia y FeDocument76 pagesCiencia y Fepablo201313No ratings yet
- Evaluación FISDocument2 pagesEvaluación FISFélix Hernán Martínez VegaNo ratings yet
- Resumen LITERATURADocument2 pagesResumen LITERATURAAlejandro del BarrioNo ratings yet
- Determinación experimental del beta de un transistor 2N2222ADocument60 pagesDeterminación experimental del beta de un transistor 2N2222AMax AraujoNo ratings yet
- Prevención en Materia de Delitos Electorales y Equidad en La ContiendaDocument10 pagesPrevención en Materia de Delitos Electorales y Equidad en La ContiendaJavier TorresNo ratings yet
- Casación No. 28055 2017 LIMA 1 - StampedDocument6 pagesCasación No. 28055 2017 LIMA 1 - StampedcalospnpNo ratings yet
- Breve Recapitulacion Marco Teorico Del Dua-5c1ce6549b24aDocument2 pagesBreve Recapitulacion Marco Teorico Del Dua-5c1ce6549b24aMariela FerradaNo ratings yet
- Anatomía en ReptilesDocument62 pagesAnatomía en Reptilesale maldonadoNo ratings yet
- Primer paso hacia el progresoDocument102 pagesPrimer paso hacia el progresoEducaCardenasIstSanPedro100% (1)
- Spsu-868 Ejercicio U015Document4 pagesSpsu-868 Ejercicio U015Jesus Alvarado100% (1)
- Frases célebres ajedrezDocument22 pagesFrases célebres ajedrezLucaToniNo ratings yet
- La Revelacion de Dios Interviene en La HistoriaDocument10 pagesLa Revelacion de Dios Interviene en La HistoriaJuan Tomás SánchezNo ratings yet
- Anon - Litelantes en EspañaDocument59 pagesAnon - Litelantes en EspañaEliana Ruth Condor VillegasNo ratings yet
- CoMeRcIaL UnoDocument178 pagesCoMeRcIaL UnoDiego JZNo ratings yet
- ADROBER Monto Exacto de PenaDocument8 pagesADROBER Monto Exacto de PenaDario Alejandro BagginiNo ratings yet
- Propuesta de Demanda UE 2020-2022 UE 303Document4 pagesPropuesta de Demanda UE 2020-2022 UE 303ALMÉ OBREGÓNNo ratings yet
- Segundo Examen Cepre - Ciclo Académico 2020-Ii: Universidad Nacional de San Cristobal de HuamangaDocument55 pagesSegundo Examen Cepre - Ciclo Académico 2020-Ii: Universidad Nacional de San Cristobal de HuamangaAnonymous oOLr7KNBgK0% (1)
- El Modelo Cipayo para El Proyecto Anti Nacional - Diego Mazzieri.Document19 pagesEl Modelo Cipayo para El Proyecto Anti Nacional - Diego Mazzieri.Diego Mazzieri100% (2)
- FENILCETONURIADocument5 pagesFENILCETONURIAFelipe ChavezNo ratings yet
- Pasaportes DiplomáticosDocument14 pagesPasaportes Diplomáticoswelni canarioNo ratings yet