You might also like
- Switching Regulator Controller: Fujitsu Semiconductor Data SheetDocument26 pagesSwitching Regulator Controller: Fujitsu Semiconductor Data SheetArie DinataNo ratings yet
- Pin Description Features: Dual P-Channel Enhancement Mode MOSFETDocument10 pagesPin Description Features: Dual P-Channel Enhancement Mode MOSFETanon_399919093No ratings yet
- Unisonic Technologies Co., LTD: BTL 4.0W X 1Ch Power AmplifierDocument4 pagesUnisonic Technologies Co., LTD: BTL 4.0W X 1Ch Power AmplifierRaja RajaNo ratings yet
- LM 386Document7 pagesLM 38619thmnlfreemsNo ratings yet
- TIP140Document7 pagesTIP140Tran Danh DatNo ratings yet
- Unisonic Technologies Co., LTD: 3-Terminal 0.5A Positive Voltage RegulatorDocument10 pagesUnisonic Technologies Co., LTD: 3-Terminal 0.5A Positive Voltage RegulatorMalek KamelNo ratings yet
- TIP131 ONSemiconductorDocument4 pagesTIP131 ONSemiconductorCin CinNo ratings yet
- Power Supply Trainer Using Lm723 IcDocument8 pagesPower Supply Trainer Using Lm723 IcDinesh Kumar MehraNo ratings yet
- Unisonic Technologies Co., LTD: Vertical Deflection Output CircuitDocument5 pagesUnisonic Technologies Co., LTD: Vertical Deflection Output CircuitNerza ElectronicsNo ratings yet
- EST7502B PC Power Supply PWM With Supervisor: General DescriptionDocument7 pagesEST7502B PC Power Supply PWM With Supervisor: General DescriptionGabriel ZanottiNo ratings yet
- TDA7297SA DatasheetDocument11 pagesTDA7297SA DatasheetLeoNo ratings yet
- TVL ST23 04 Ad0Document9 pagesTVL ST23 04 Ad0coulsonpfilNo ratings yet
- Unisonic Technologies Co., LTD: Vertical Deflection Output CircuitDocument5 pagesUnisonic Technologies Co., LTD: Vertical Deflection Output CircuitVinod kumarNo ratings yet
- Charge Pump Dc-To-Dc Voltage ConverterDocument11 pagesCharge Pump Dc-To-Dc Voltage ConverterRicardo KraftmanNo ratings yet
- 3290798752Document14 pages3290798752Abdeljalil ElhimaniNo ratings yet
- TL494, NCV494 SWITCHMODE™ Pulse Width Modulation Control CircuitDocument14 pagesTL494, NCV494 SWITCHMODE™ Pulse Width Modulation Control CircuitEge YekkkNo ratings yet
- Datasheet: DescriptionDocument8 pagesDatasheet: DescriptionMax TeleNo ratings yet
- Strobe Flash Applications: Maximum RatingsDocument5 pagesStrobe Flash Applications: Maximum RatingsalbertNo ratings yet
- KA79XX/KA79XXA: 3-Terminal 1A Negative Voltage RegulatorrrrDocument18 pagesKA79XX/KA79XXA: 3-Terminal 1A Negative Voltage Regulatorrrrpaulo2leiteNo ratings yet
- NPN MJ1501GDocument7 pagesNPN MJ1501GvijayforrockNo ratings yet
- 2n3055ag, Mj15015g, Mj15016g On DatasheetDocument7 pages2n3055ag, Mj15015g, Mj15016g On DatasheetJose Carlos SoaresNo ratings yet
- Instrukcja Obslugi - TT-S6D-engDocument2 pagesInstrukcja Obslugi - TT-S6D-engTodor GrudevNo ratings yet
- PLL XR2212 ExarCorporationDocument20 pagesPLL XR2212 ExarCorporationHoan TranNo ratings yet
- INPAQ Transient Voltage Suppressor TVLST2304BD0 Specification A0Document8 pagesINPAQ Transient Voltage Suppressor TVLST2304BD0 Specification A0Isaac CostaNo ratings yet
- 78M15G T60 KDocument10 pages78M15G T60 KMalek KamelNo ratings yet
- TV and CRT Display Vertical Output IC With Bus Control SupportDocument4 pagesTV and CRT Display Vertical Output IC With Bus Control SupportdanielNo ratings yet
- BTB16-800BW TGSDocument1 pageBTB16-800BW TGSMajid RakhshiNo ratings yet
- Unisonic Technologies Co., LTD: High Speed Operational AmplifierDocument6 pagesUnisonic Technologies Co., LTD: High Speed Operational AmplifierTioRamadhanNo ratings yet
- Single-Channel: 6N138, 6N139 Dual-Channel: HCPL-2730, HCPL-2731 Low Input Current High Gain Split Darlington OptocouplersDocument15 pagesSingle-Channel: 6N138, 6N139 Dual-Channel: HCPL-2730, HCPL-2731 Low Input Current High Gain Split Darlington Optocouplersdevrim.kosalNo ratings yet
- SMPS Control CircuitDocument5 pagesSMPS Control CircuitNAYEEM100% (1)
- Semt Lcdaxxc 8Document6 pagesSemt Lcdaxxc 8Aditya SrivatsavNo ratings yet
- Dual Operational Amplifier: Features DescriptionsDocument10 pagesDual Operational Amplifier: Features DescriptionsElmer Leodan Rojas CachayNo ratings yet
- APM4548K: Features Pin DescriptionDocument13 pagesAPM4548K: Features Pin DescriptionMauricio MartinNo ratings yet
- 12W Hi-Fi AUDIO AMPDocument8 pages12W Hi-Fi AUDIO AMPodemontealtoNo ratings yet
- TDA7377 Fiches TechniqueDocument8 pagesTDA7377 Fiches TechniqueOuahid AdaNo ratings yet
- Control IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4700 TDA 4718Document21 pagesControl IC For Single-Ended and Push-Pull Switched-Mode Power Supplies (SMPS) TDA 4700 TDA 4718Wellison RodriguesNo ratings yet
- tsm4425 A09Document6 pagestsm4425 A09خليل الحريريNo ratings yet
- BA3308Document4 pagesBA3308Miguel Ángel PérezNo ratings yet
- IE-612 HA17393 Comparador Dual PDFDocument8 pagesIE-612 HA17393 Comparador Dual PDFnadie nadaNo ratings yet
- HA17903, HA17393 Series: Dual ComparatorDocument8 pagesHA17903, HA17393 Series: Dual ComparatorGaspar GarciaNo ratings yet
- BL8023C Datasheet V1.5Document6 pagesBL8023C Datasheet V1.5hombre pocilgaNo ratings yet
- STP75NF75 ST MicroelectronicsDocument16 pagesSTP75NF75 ST MicroelectronicsAloisio RibeiroNo ratings yet
- Ultra Fast FET-Input Operational Amplifier: LH0032 / LH0032CDocument10 pagesUltra Fast FET-Input Operational Amplifier: LH0032 / LH0032CmoiseisinhuNo ratings yet
- BT158W-1200T: 1. General DescriptionDocument13 pagesBT158W-1200T: 1. General DescriptionAntoxaNo ratings yet
- TS78L00 Series: Taiwan SemiconductorDocument12 pagesTS78L00 Series: Taiwan Semiconductorwallklock47No ratings yet
- TC4538BP Datasheet en 20140301Document9 pagesTC4538BP Datasheet en 20140301Strati YovchevNo ratings yet
- STK554U392A-E: Inverter Power H-IC For 3-Phase Motor DriveDocument15 pagesSTK554U392A-E: Inverter Power H-IC For 3-Phase Motor Drivegotcha75No ratings yet
- Toshiba voltage regulators for 1A output currentDocument10 pagesToshiba voltage regulators for 1A output currentFederico GMNo ratings yet
- Ut 9435 Hl. Ic. TV Led Polytron 14Document4 pagesUt 9435 Hl. Ic. TV Led Polytron 14nuwari fadliNo ratings yet
- D9259Document10 pagesD9259calinsatNo ratings yet
- Mip2L30Mtscf: Product StandardsDocument9 pagesMip2L30Mtscf: Product StandardsSIVARAMANJAGANATHANNo ratings yet
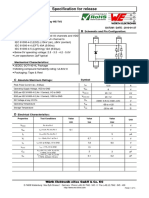
- Specification For Release: TVS Diode Array WE-TVS SOT143-4LDocument5 pagesSpecification For Release: TVS Diode Array WE-TVS SOT143-4LkapakdoonNo ratings yet
- TL494 Linear Integrated Circuit: Voltage Mode PWM Control CircuitDocument7 pagesTL494 Linear Integrated Circuit: Voltage Mode PWM Control CircuitIsrael GonzalesNo ratings yet
- IRAMX16UP60ADocument18 pagesIRAMX16UP60Atheylor1990No ratings yet
- Low Capacitance TVS For LVDS Interfaces: Protection Products - Railclamp Description FeaturesDocument8 pagesLow Capacitance TVS For LVDS Interfaces: Protection Products - Railclamp Description FeaturesAnibal Tantalean SarmientoNo ratings yet
- Unisonic Technologies Co., LTD: Description 1Document5 pagesUnisonic Technologies Co., LTD: Description 1alexjcc10No ratings yet
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Sentron 7kg9661 UsDocument292 pagesSentron 7kg9661 UsSimpalean NicolaeNo ratings yet
- Scheme Surse in ComutatieDocument145 pagesScheme Surse in ComutatieSimpalean NicolaeNo ratings yet
- TwinCAT 2 Manual v3.0.1Document412 pagesTwinCAT 2 Manual v3.0.1Vladimir Friz100% (2)
- Cemont Mma Units 125-130a Rev.00 SMDocument10 pagesCemont Mma Units 125-130a Rev.00 SMSimpalean Nicolae100% (1)
- Welcome To S7-PLCSIM, The Software For Simulating S7 CpusDocument7 pagesWelcome To S7-PLCSIM, The Software For Simulating S7 CpusSimpalean NicolaeNo ratings yet
- Led La0aa Chassis 22lv255c-UaDocument48 pagesLed La0aa Chassis 22lv255c-UaSimpalean NicolaeNo ratings yet
- Service Manual for Minarc 150/150 VRD/151 Welding MachinesDocument27 pagesService Manual for Minarc 150/150 VRD/151 Welding MachinesSimpalean NicolaeNo ratings yet
- Telwin Tecnica 144-164 Welding-Inverter SMDocument21 pagesTelwin Tecnica 144-164 Welding-Inverter SMAndreea TudoseNo ratings yet
- Tensor Algebra: 2.1 Linear Forms and Dual Vector SpaceDocument13 pagesTensor Algebra: 2.1 Linear Forms and Dual Vector SpaceashuNo ratings yet
- Choudhary Coaching Classes and Counselling Centre: Dy DX XDocument6 pagesChoudhary Coaching Classes and Counselling Centre: Dy DX XTrupti JadhaoNo ratings yet
- OutputDocument5 pagesOutputMoch Raka RizkiNo ratings yet
- Natural Frequency Testing GuideDocument12 pagesNatural Frequency Testing GuideRais RijalNo ratings yet
- Nuclear Physics: DAE SymposiumDocument579 pagesNuclear Physics: DAE SymposiumESNo ratings yet
- Mould Fluxes in The Steel Continuous Casting ProcessDocument30 pagesMould Fluxes in The Steel Continuous Casting ProcessUgur KayaNo ratings yet
- MIT Unified Engineering Test 2Document7 pagesMIT Unified Engineering Test 2Anand AkkineniNo ratings yet
- Statistical PhysicsDocument105 pagesStatistical PhysicsMahmuddin Nurul Fajri100% (2)
- PLAXIS - 3D2018 Tutorial Lesson 09 PDFDocument14 pagesPLAXIS - 3D2018 Tutorial Lesson 09 PDFMarwan HMNo ratings yet
- Book ListDocument18 pagesBook ListazizbinnaserNo ratings yet
- Mechanical Resonance - Theory and ApplicationsDocument10 pagesMechanical Resonance - Theory and ApplicationsEbrahim Abd El HadyNo ratings yet
- 5LABO Ganago Student Lab6Document24 pages5LABO Ganago Student Lab6Rocio Deidamia Puppi HerreraNo ratings yet
- Emissivity Measurement of Radiating SurfacesDocument4 pagesEmissivity Measurement of Radiating Surfacesashish100% (1)
- Dispersion On A Sphere: Received23 December 1952)Document11 pagesDispersion On A Sphere: Received23 December 1952)Jenny Astrid Baron MorenoNo ratings yet
- Determinação de Enxofre em Shampoo Por Espectrofotometria UV-VIS. Avaliação de Métodos de Preparo de AmostrasDocument6 pagesDeterminação de Enxofre em Shampoo Por Espectrofotometria UV-VIS. Avaliação de Métodos de Preparo de AmostrasEduardoNo ratings yet
- Senior SolutionDocument2 pagesSenior Solutionminhtue90No ratings yet
- 11 Physics Sample Paper 4Document9 pages11 Physics Sample Paper 4Jyoti YadavNo ratings yet
- CR 100454 NDocument60 pagesCR 100454 NLương Hữu BắcNo ratings yet
- Front Horn Theory - Design of A Front Loaded Exponential HornDocument26 pagesFront Horn Theory - Design of A Front Loaded Exponential HornSean_Middleton100% (3)
- Double Layer LecturesDocument38 pagesDouble Layer LecturesKhaled AbeedNo ratings yet
- Adiabatic Flow in a Duct with FrictionDocument7 pagesAdiabatic Flow in a Duct with FrictioncroprobosNo ratings yet
- Pressure MeasurementDocument19 pagesPressure Measurementdevarshikumar vaidya100% (1)
- Reynolds NumberDocument15 pagesReynolds NumberZzPumpkingNo ratings yet
- Filled Polyamide 12 Using The Multi Jet Fusion Printing ProcessDocument21 pagesFilled Polyamide 12 Using The Multi Jet Fusion Printing Processpat151No ratings yet
- Specimen Paper Unit 6993 01 Additional Mathematics Advanced LevelDocument16 pagesSpecimen Paper Unit 6993 01 Additional Mathematics Advanced LevelIshuWaryNo ratings yet
- Energy For ProductivityDocument65 pagesEnergy For ProductivityNurettinAlpNo ratings yet
- Synthesis of Inorganic Solids Using MicrowavesDocument14 pagesSynthesis of Inorganic Solids Using MicrowavesMuaathe IbrahimNo ratings yet
- Chapter 4 Process Description (Draft)Document4 pagesChapter 4 Process Description (Draft)ezraNo ratings yet
- HDI Direct Injection OperationDocument31 pagesHDI Direct Injection OperationdjautoNo ratings yet
- BS-200 Parameter Setting for UREA Test (40Document42 pagesBS-200 Parameter Setting for UREA Test (40Jose Rolando Orellana Rodriguez75% (4)