You might also like
- Simulation of Wheel Impact Test Using Nite Element MethodDocument9 pagesSimulation of Wheel Impact Test Using Nite Element MethodKemal BalabanNo ratings yet
- Involute Spline Strength CalculationsDocument1 pageInvolute Spline Strength CalculationsRjgandhi65No ratings yet
- CFD Application Tutorials 2Document35 pagesCFD Application Tutorials 2Jubril AkinwandeNo ratings yet
- DIN 17100 STEELS GUIDEDocument7 pagesDIN 17100 STEELS GUIDEsardhan.rajender84No ratings yet
- R.drago Publications ListDocument14 pagesR.drago Publications Listidontlikeebooks100% (1)
- Automotive Workshop On BiW-Structures PDFDocument41 pagesAutomotive Workshop On BiW-Structures PDFArvind KatyayanNo ratings yet
- Tolerance Band PDFDocument3 pagesTolerance Band PDFSuresh DatalNo ratings yet
- A Kinematic Analysis of Meshing Polymer Gear TeethDocument16 pagesA Kinematic Analysis of Meshing Polymer Gear TeethsandeepNo ratings yet
- Developments in Thermoplastic Door ModulesDocument8 pagesDevelopments in Thermoplastic Door Modulesrake1984No ratings yet
- Sway Bar CalculationsDocument6 pagesSway Bar CalculationsMark van BuurenNo ratings yet
- AISI 440 Martensit PDFDocument4 pagesAISI 440 Martensit PDFJimmyVargasNo ratings yet
- Automobile Vibration AnalysisDocument18 pagesAutomobile Vibration AnalysisDavid PomaNo ratings yet
- Estimating Secondary Mass Changes and Environmental Impacts in Vehicle DesignDocument33 pagesEstimating Secondary Mass Changes and Environmental Impacts in Vehicle DesignAnonymous QiMB2lBCJLNo ratings yet
- Analysis of The Yokeless and Segmented Armature MachineDocument7 pagesAnalysis of The Yokeless and Segmented Armature MachineSeksan KhamkaewNo ratings yet
- Worm DriveDocument6 pagesWorm DriveRavi Kiran MeesalaNo ratings yet
- HOERBIGER DCT-Type SynchronizerDocument4 pagesHOERBIGER DCT-Type SynchronizermaheshmbelgaviNo ratings yet
- Comparative Analysis of Crashworthiness of Empty and Foam-Filled Thin-Walled Tubes PDFDocument7 pagesComparative Analysis of Crashworthiness of Empty and Foam-Filled Thin-Walled Tubes PDFngocsanhaNo ratings yet
- Techniques For Engine Mount Modeling and OptimizationDocument164 pagesTechniques For Engine Mount Modeling and OptimizationSwapnil NarnavareNo ratings yet
- Chain RollerANSIDocument35 pagesChain RollerANSICallao JimmyNo ratings yet
- Cost Reduction and Light Weighting (BIW)Document25 pagesCost Reduction and Light Weighting (BIW)tran hungNo ratings yet
- GS52Document3 pagesGS52S.Hasan MirasadiNo ratings yet
- Σχεδιασμός σε επιφανειακή πίεση μετωπικών οδοντωτών τροχών κατά AGMADocument1 pageΣχεδιασμός σε επιφανειακή πίεση μετωπικών οδοντωτών τροχών κατά AGMAkstayroskNo ratings yet
- Face Gears: Geometry and Strength: Ulrich Kissling and Stefan BeermannDocument8 pagesFace Gears: Geometry and Strength: Ulrich Kissling and Stefan BeermannosaniamecNo ratings yet
- ADAMS/Car Templates: About This Guide 3 Using Communicators 5 Template Descriptions 15Document103 pagesADAMS/Car Templates: About This Guide 3 Using Communicators 5 Template Descriptions 15Entropay UserNo ratings yet
- Plastic Spur Gear Pair FailureDocument14 pagesPlastic Spur Gear Pair FailureDan Wolf100% (1)
- An Investigation of The Fatigue and Fretting PerformanceDocument19 pagesAn Investigation of The Fatigue and Fretting PerformanceKrishna PrasadNo ratings yet
- Esbm5a-B 1n261-s Aa RSWDocument37 pagesEsbm5a-B 1n261-s Aa RSWChandrajeet Shelke50% (2)
- Din 5480-2 - 2006-05Document40 pagesDin 5480-2 - 2006-05Luiz Munari100% (2)
- A1000 PDFDocument5 pagesA1000 PDFManeesh BangaleNo ratings yet
- Spur Gear, Helical Gear Design Step Final1Document2 pagesSpur Gear, Helical Gear Design Step Final1Venkadesh ShanmugamNo ratings yet
- Silent BlockDocument21 pagesSilent BlockVijayGowthamanNo ratings yet
- Grommets, Bushings and Cable GlandsDocument13 pagesGrommets, Bushings and Cable GlandsLukiana AtmanegaraNo ratings yet
- BMW 1 Series Firewall Panel Optimization for NVH PerformanceDocument20 pagesBMW 1 Series Firewall Panel Optimization for NVH Performancepi79No ratings yet
- CAE Prediction of Truck Cab Fatigue StrengthDocument7 pagesCAE Prediction of Truck Cab Fatigue StrengthmeDC123No ratings yet
- EMF Brake CatalogDocument24 pagesEMF Brake CatalogHon Nguyen VietNo ratings yet
- Auto Noise Vibration Harshness Analysis Full VehicleDocument5 pagesAuto Noise Vibration Harshness Analysis Full VehicleManeesh M KaimalNo ratings yet
- ASTM G171-003 Standard Test Method For Scratch Hardness of Materials Using A Diamond Stylus PDFDocument7 pagesASTM G171-003 Standard Test Method For Scratch Hardness of Materials Using A Diamond Stylus PDFnolanjcNo ratings yet
- Auto Full Vehicle Durability Using Abaqus Standard 11Document4 pagesAuto Full Vehicle Durability Using Abaqus Standard 11TimNo ratings yet
- Cold Rolled Steel Sheet-JFE PDFDocument32 pagesCold Rolled Steel Sheet-JFE PDFEduardo Javier Granados SanchezNo ratings yet
- Design and Optimization of Formula SAE Suspension SystemDocument27 pagesDesign and Optimization of Formula SAE Suspension SystemRushik KudaleNo ratings yet
- Fea Analysis of A Caliper Bracket For Disk BrakeDocument5 pagesFea Analysis of A Caliper Bracket For Disk Brakesuraj dhulannavar100% (1)
- Steering 9-07-15Document10 pagesSteering 9-07-15Harshit GuptaNo ratings yet
- The Radial and Axial Stiffnesses of Spherical Roller Bearing SystemDocument10 pagesThe Radial and Axial Stiffnesses of Spherical Roller Bearing Systemdaniel rezmiresNo ratings yet
- The Commercial Vehicle: An IntroductionDocument24 pagesThe Commercial Vehicle: An IntroductionPawan Kumar Gupta100% (1)
- Friction torque of rotary shaft lip sealDocument5 pagesFriction torque of rotary shaft lip sealmans2014No ratings yet
- RL 01 CAE-Durability Analysis of HCV Chassis Using FPM Approach Mahindra EnggDocument9 pagesRL 01 CAE-Durability Analysis of HCV Chassis Using FPM Approach Mahindra EnggrcpawarNo ratings yet
- Stress Analysis Spur Gear Design by Using Ansys Workbench PDFDocument3 pagesStress Analysis Spur Gear Design by Using Ansys Workbench PDFJai SharmaNo ratings yet
- DFMDocument4 pagesDFMMarko BrkicNo ratings yet
- Dynamic Factor FormulaeDocument15 pagesDynamic Factor FormulaeShubham More0% (1)
- Spline Stress CalculationDocument8 pagesSpline Stress CalculationSantiago MolinaNo ratings yet
- Diseños de EngranajesDocument26 pagesDiseños de EngranajesTarja Turunen MexicoNo ratings yet
- Steel-Smith PDF CatalogueDocument93 pagesSteel-Smith PDF CatalogueneetadaeroNo ratings yet
- Brake Calculations SheetDocument46 pagesBrake Calculations Sheetashish kumarNo ratings yet
- ISO Tolerance Part 1 PDFDocument34 pagesISO Tolerance Part 1 PDFRisira Erantha KannangaraNo ratings yet
- Numerical Gerotor DesignDocument18 pagesNumerical Gerotor Designsardhan.rajender84No ratings yet
- Interlloy 440C MartensiticDocument4 pagesInterlloy 440C MartensiticGuillaume BoyerNo ratings yet
- Fatigue Analysis GuideDocument12 pagesFatigue Analysis GuideSargunam SankaravadivelNo ratings yet
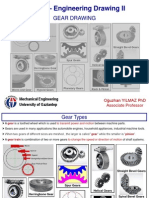
- ME 114 Engineering Drawing II Gear DrawingDocument12 pagesME 114 Engineering Drawing II Gear Drawingpradeep315No ratings yet
- Guide to Load Analysis for Durability in Vehicle EngineeringFrom EverandGuide to Load Analysis for Durability in Vehicle EngineeringP. JohannessonRating: 4 out of 5 stars4/5 (1)
- Design Principles For Precision MechanismsDocument136 pagesDesign Principles For Precision Mechanismsnadjib62No ratings yet
- Smith and Chetwynd - Foundations For Ultraprecision Mechanism Design PDFDocument337 pagesSmith and Chetwynd - Foundations For Ultraprecision Mechanism Design PDFMarcelo Oliveira AnastacioNo ratings yet
- C Standard Library Tutorial PDFDocument253 pagesC Standard Library Tutorial PDFJolly RogerNo ratings yet
- Siemens Analysers PDFDocument2 pagesSiemens Analysers PDFnadjib62No ratings yet
- PattesDocument36 pagesPattesnadjib62No ratings yet
- C Standard Library Tutorial PDFDocument253 pagesC Standard Library Tutorial PDFJolly RogerNo ratings yet
- C Standard Library Tutorial PDFDocument253 pagesC Standard Library Tutorial PDFJolly RogerNo ratings yet
- Cryogenic Tubroexpander PosterDocument1 pageCryogenic Tubroexpander PosterHuan Trinh VanNo ratings yet
- Electromagnetic Waves PDFDocument262 pagesElectromagnetic Waves PDFbmkondareddyNo ratings yet
- Electromagnetic Waves PDFDocument262 pagesElectromagnetic Waves PDFbmkondareddyNo ratings yet
- Electromagnetic Waves PDFDocument262 pagesElectromagnetic Waves PDFbmkondareddyNo ratings yet
- Practical Boiler Water TreatmentDocument285 pagesPractical Boiler Water TreatmentLuciano Cardoso Vasconcelos100% (14)
- Die Casting Solutions.: Shaping The Future of Mobility, GloballyDocument12 pagesDie Casting Solutions.: Shaping The Future of Mobility, Globallynadjib62No ratings yet
- GD 52015 enDocument6 pagesGD 52015 ennadjib62No ratings yet
- Oil Sand and Tar Production ProcessesDocument630 pagesOil Sand and Tar Production Processeszakiyah irfinNo ratings yet
- Introduction To NMR Spectroscopy: I.Phan & J. KoppDocument74 pagesIntroduction To NMR Spectroscopy: I.Phan & J. KoppAhmed HamedNo ratings yet
- Ophthalmics Brochure 1015 Lay2Document36 pagesOphthalmics Brochure 1015 Lay2nadjib62100% (2)
- BLOA LAC 0115 Web 4Document24 pagesBLOA LAC 0115 Web 4nadjib62No ratings yet
- NMR in Drug DesignDocument19 pagesNMR in Drug Designnadjib62No ratings yet
- Brochure Agrochemicals 2016 enDocument8 pagesBrochure Agrochemicals 2016 ennadjib62No ratings yet
- Ophthalmics Brochure 1015 Lay2Document36 pagesOphthalmics Brochure 1015 Lay2nadjib62100% (2)
- Buz GD Sap-Flyer 0515 WebDocument4 pagesBuz GD Sap-Flyer 0515 Webnadjib62No ratings yet
- +++ Magnetic-Resonance-Technology-Hardware-And-System-Component-Des PDFDocument402 pages+++ Magnetic-Resonance-Technology-Hardware-And-System-Component-Des PDFnadjib62100% (1)
- Publication PDFDocument24 pagesPublication PDFnadjib62No ratings yet
- BASF-MBS Broschuere MasterSeal 7000CR en LY18Document2 pagesBASF-MBS Broschuere MasterSeal 7000CR en LY18Amar WadoodNo ratings yet
- Services in VivoDocument2 pagesServices in Vivonadjib62No ratings yet
- Basf Product Selection GuideDocument166 pagesBasf Product Selection GuideSekson Lapcharoensin100% (1)
- Evotec - Oncology Drug DiscoveryDocument17 pagesEvotec - Oncology Drug Discoverynadjib62No ratings yet
- +++ Livre 1 PDFDocument287 pages+++ Livre 1 PDFnadjib62No ratings yet
- Market PotentialDocument41 pagesMarket Potentialnadjib62No ratings yet
- Kiln Doctor FAQDocument3 pagesKiln Doctor FAQgvrr1954No ratings yet
- WBCSD TIP Sustainability Driven SDG Tire Sector RoadmapDocument49 pagesWBCSD TIP Sustainability Driven SDG Tire Sector RoadmapComunicarSe-ArchivoNo ratings yet
- Harley Davidson Sportster Service ManualDocument252 pagesHarley Davidson Sportster Service Manualphaneufdl100% (3)
- Inventari: Contingut Wedo 2.0: Foto Código Nombre Cantidad Que Falta Foto Código Nombre Cantidad Que Falta 3003 2 1Document6 pagesInventari: Contingut Wedo 2.0: Foto Código Nombre Cantidad Que Falta Foto Código Nombre Cantidad Que Falta 3003 2 1Rafa S.C.No ratings yet
- Vespa S 125 3V Ie 150 3V Ie UPUTSTVODocument90 pagesVespa S 125 3V Ie 150 3V Ie UPUTSTVOdoughstoneNo ratings yet
- Yokohama CarDocument12 pagesYokohama Caraum_st40No ratings yet
- S80-120FT SERIES: Technical GuideDocument16 pagesS80-120FT SERIES: Technical GuideMeyer CaraballoNo ratings yet
- Periodic MaintenanceDocument36 pagesPeriodic MaintenanceDarwin AlvarezNo ratings yet
- Tractor in The Hills!Document2 pagesTractor in The Hills!Sara SNo ratings yet
- 19. OUTLINE OF SERVICEDocument34 pages19. OUTLINE OF SERVICEgerman gualavisiNo ratings yet
- Farm Tire Handbook 2005Document163 pagesFarm Tire Handbook 2005lujoflosaNo ratings yet
- Track tyre pressure recommendationsDocument1 pageTrack tyre pressure recommendationswillupowersNo ratings yet
- Everything You Need To Know About TyresDocument20 pagesEverything You Need To Know About TyresContinentalTyresNo ratings yet
- Rubber, 5. Solution Rubbers: 1. Synthesis by Anionic PolymerizationDocument32 pagesRubber, 5. Solution Rubbers: 1. Synthesis by Anionic PolymerizationJohn Patrick DagleNo ratings yet
- Serial Number Range: From SN 3084-101 To 3090-2213Document118 pagesSerial Number Range: From SN 3084-101 To 3090-2213Святослав ВороновNo ratings yet
- PR en 13036 - 4Document23 pagesPR en 13036 - 4Nedelea Alexandru100% (1)
- An Experimental Study On Bituminous Mix Design Using Different Percentage of Crumb Rubber To Improve The Strength of PavementDocument22 pagesAn Experimental Study On Bituminous Mix Design Using Different Percentage of Crumb Rubber To Improve The Strength of PavementEditor IJTSRDNo ratings yet
- Thompson R. J. and Visser A.T. 1999. Designing and Managing Unpaved Opencast Mine Haul Roads For Optimum PerformanceDocument17 pagesThompson R. J. and Visser A.T. 1999. Designing and Managing Unpaved Opencast Mine Haul Roads For Optimum PerformanceIr Azizul Bin HawariNo ratings yet
- Brio 125 Owners ManualDocument45 pagesBrio 125 Owners ManualJosé CarlosNo ratings yet
- Owners Manual Lotus Emira 2022Document252 pagesOwners Manual Lotus Emira 2022Ichraf AouiniNo ratings yet
- General Tire 4x4 Suv Adventure Guide 2017Document46 pagesGeneral Tire 4x4 Suv Adventure Guide 2017api-286844184No ratings yet
- BendiDocument4 pagesBendicornel_lupuNo ratings yet
- Mechanical Engineer resume with experience in automotive brake systemsDocument2 pagesMechanical Engineer resume with experience in automotive brake systemsKartheek SamayamantriNo ratings yet
- Measurement of Road RacecoursesDocument72 pagesMeasurement of Road RacecoursesMarcel BiltNo ratings yet
- Cable Pulling Machines & Cable Drum Trailers CatalogueDocument58 pagesCable Pulling Machines & Cable Drum Trailers CatalogueFiber Cable Blowing Machines100% (1)
- (Final) Bridgestone Data Book 2023Document56 pages(Final) Bridgestone Data Book 2023Wisan Nursamsi SidikNo ratings yet
- 797BDocument19 pages797Barfa ujiantoNo ratings yet
- WL 862H - T2 Spec A4Document5 pagesWL 862H - T2 Spec A4Martha Veraida SilaenNo ratings yet
- 1344330167binder2Document34 pages1344330167binder2CoolerAdsNo ratings yet