You might also like
- Comparision of Torsional Vibration Measurement TechniquesDocument16 pagesComparision of Torsional Vibration Measurement TechniquesRikkinNo ratings yet
- Familiarization With and Performance Check Of, Vibration Testing & Measuring EquipmentDocument33 pagesFamiliarization With and Performance Check Of, Vibration Testing & Measuring EquipmentOmar Saleem100% (1)
- Measurement of Process Value, Flow, Measurement Sergejs BoikoDocument23 pagesMeasurement of Process Value, Flow, Measurement Sergejs BoikoСергей БойкоNo ratings yet
- Data Acquisition: Detectors: TransducersDocument11 pagesData Acquisition: Detectors: TransducersVasile RaduNo ratings yet
- A 10-mW Two-Channel Fully Integrated System-on-Chip For Eddy-Current Position SensingDocument10 pagesA 10-mW Two-Channel Fully Integrated System-on-Chip For Eddy-Current Position SensingkurabyqldNo ratings yet
- EECC0097Document6 pagesEECC0097Predrag PejicNo ratings yet
- Describe The Construction of A Electromagnetic Velocity Sensor and Explain Its WorkingDocument8 pagesDescribe The Construction of A Electromagnetic Velocity Sensor and Explain Its WorkingJiten Thakur100% (1)
- Local ProbesDocument87 pagesLocal Probessujiv_sujiv1278No ratings yet
- Detection of Eccentricity Faults in Machine UsingF-1Document10 pagesDetection of Eccentricity Faults in Machine UsingF-1NAOUREZ BEN HADJNo ratings yet
- Design and Development of Gap SensorDocument14 pagesDesign and Development of Gap SensorJagannath Prasad SahooNo ratings yet
- Vibration Problem Solution of High-Capacity HydropDocument6 pagesVibration Problem Solution of High-Capacity HydropManel MontesinosNo ratings yet
- Strain Gauge Based Accelerometer PDFDocument13 pagesStrain Gauge Based Accelerometer PDFMarcell LandryNo ratings yet
- Actuators 10 00115Document16 pagesActuators 10 00115shishirduttphdNo ratings yet
- Rapport InductosynDocument13 pagesRapport InductosynHemant SavlaNo ratings yet
- Questions and AnswersDocument15 pagesQuestions and AnswersMahtab GhummanNo ratings yet
- New Sensor Technology For Measuring Torsional Shaft Vibration in Turbine GeneratorsDocument8 pagesNew Sensor Technology For Measuring Torsional Shaft Vibration in Turbine GeneratorssebastianNo ratings yet
- Turbovisory SystemDocument2 pagesTurbovisory SystemLily Sharma100% (1)
- Cost Effective SystemDocument6 pagesCost Effective SystemrajeshmholmukheNo ratings yet
- Identification of Geometry and Dynamic Properties of Hydro Generators Based On Signal Analysis of Air Gap - Iris PowerDocument8 pagesIdentification of Geometry and Dynamic Properties of Hydro Generators Based On Signal Analysis of Air Gap - Iris PowerSasi NimmakayalaNo ratings yet
- Torque SensorDocument6 pagesTorque SensorBayu Ari MurtiNo ratings yet
- Ways To Measure The Force Acting On A Rotating Shaft: What Is Torque?Document5 pagesWays To Measure The Force Acting On A Rotating Shaft: What Is Torque?chandununnaNo ratings yet
- EPRI Vibration DiagnosticsDocument43 pagesEPRI Vibration DiagnosticsPULKIT AGARWALNo ratings yet
- Radial Feeder Protection Using Arduino: International Journal of Innovative and Emerging Research in EngineeringDocument9 pagesRadial Feeder Protection Using Arduino: International Journal of Innovative and Emerging Research in EngineeringAmeer KolambalamNo ratings yet
- Strain Gauge Based AccelerometerDocument13 pagesStrain Gauge Based Accelerometeranandakumarmts0% (1)
- CBM RotoDocument8 pagesCBM RotoSudev NairNo ratings yet
- Applsci 08 01073 PDFDocument13 pagesApplsci 08 01073 PDFErsi Ago100% (1)
- Eddy Probe System On The Basis of New Technology: FT L C L I T UDocument6 pagesEddy Probe System On The Basis of New Technology: FT L C L I T UNatthaphon NaosookNo ratings yet
- Sensorless Vector Controller For A Synchronous Reluctance MotorDocument9 pagesSensorless Vector Controller For A Synchronous Reluctance MotorUma SathyadevanNo ratings yet
- Magnetic Bearing Control System Based On PI and PIDocument5 pagesMagnetic Bearing Control System Based On PI and PIBrayan Daniel Duran FloresNo ratings yet
- Objective QuestionsDocument15 pagesObjective QuestionsAyyappa JavangulaNo ratings yet
- On-Line Current Monitoring To Diagnose Airgap Eccentricity - An Industrial Case History of A Large High Voltage Three Phase Induction MotorDocument3 pagesOn-Line Current Monitoring To Diagnose Airgap Eccentricity - An Industrial Case History of A Large High Voltage Three Phase Induction MotorJairo CorimanyaNo ratings yet
- Displacement and PositionDocument6 pagesDisplacement and PositioncoolhemakumarNo ratings yet
- MSD AssignmentDocument16 pagesMSD AssignmentNanda KishoreNo ratings yet
- Unit 4Document16 pagesUnit 4udayoleti21005a0406No ratings yet
- Induction Motor CMDocument6 pagesInduction Motor CMAli HassanNo ratings yet
- Transducers 3Document15 pagesTransducers 3Rudra MishraNo ratings yet
- Gearbox White PaperDocument13 pagesGearbox White PaperRony MartínezNo ratings yet
- Development of A Rotating Shaft Torque Sensor For Automotive ApplicationsDocument5 pagesDevelopment of A Rotating Shaft Torque Sensor For Automotive ApplicationsCigifarmNo ratings yet
- Chapter 12Document12 pagesChapter 12bhaskarNo ratings yet
- Sensors and Transducers OverviewDocument77 pagesSensors and Transducers OverviewVarunNo ratings yet
- Unit 2 SensorsDocument69 pagesUnit 2 SensorsSrinivasan V PNo ratings yet
- Meassurement and InstrumentationDocument223 pagesMeassurement and InstrumentationManuel Adrian Vidal PenedoNo ratings yet
- Ferraris Acceleration SensorDocument6 pagesFerraris Acceleration SensorSantiago MatthaNo ratings yet
- An Overview of Steam Turbine Blade Vibration Monitoring System (BVMS)Document3 pagesAn Overview of Steam Turbine Blade Vibration Monitoring System (BVMS)SebastianNo ratings yet
- Lecture Notes 3Document5 pagesLecture Notes 3Arpit SharmaNo ratings yet
- AlTek PickupsDocument40 pagesAlTek PickupsLuis Alfonso Andler C.100% (1)
- Sensors 13 12149Document18 pagesSensors 13 12149Saujatya MandalNo ratings yet
- Design of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterDocument4 pagesDesign of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterLawson SangoNo ratings yet
- 3.2 Sensors and TransducersDocument38 pages3.2 Sensors and Transducersjohanna shaanyenengeNo ratings yet
- Module 2 CE 225Document17 pagesModule 2 CE 225Nacht TriadNo ratings yet
- Torque Sensor 2Document28 pagesTorque Sensor 2Chintu ChintuNo ratings yet
- Unbalanced Magnetic Pull and Air-Gap Monitoring For Large HydrogeneratorsDocument2 pagesUnbalanced Magnetic Pull and Air-Gap Monitoring For Large HydrogeneratorsbasilecoqNo ratings yet
- Electronic Sensors in Off-Road VehiclesDocument8 pagesElectronic Sensors in Off-Road VehiclesKrunal Gandhi100% (1)
- Instrumentation & Measurements: Ruqia IkramDocument16 pagesInstrumentation & Measurements: Ruqia Ikramjawad khalidNo ratings yet
- Chapter 6Document13 pagesChapter 6steven pitchNo ratings yet
- Chapter 3 Position, Speed and Acceleration MeasurementDocument18 pagesChapter 3 Position, Speed and Acceleration MeasurementMohamed ZahranNo ratings yet
- 1.1 Introduction:-: Function of Power CylinderDocument18 pages1.1 Introduction:-: Function of Power CylinderAbhishek SahaNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Piezoelectric Actuators: Vector Control Method: Basic, Modeling and Mechatronic Design of Ultrasonic DevicesFrom EverandPiezoelectric Actuators: Vector Control Method: Basic, Modeling and Mechatronic Design of Ultrasonic DevicesNo ratings yet
- Report Part A Container Sample 1 - CompressedDocument22 pagesReport Part A Container Sample 1 - CompressedMohamed OmarNo ratings yet
- Generator Rotor Removal PDFDocument8 pagesGenerator Rotor Removal PDFMohamed Omar100% (1)
- Pre Site Survey ChecklistDocument1 pagePre Site Survey ChecklistMohamed OmarNo ratings yet
- M e Services SurveyDocument4 pagesM e Services SurveyMohamed OmarNo ratings yet
- Axial Comp On OffDocument4 pagesAxial Comp On OffMohamed OmarNo ratings yet
- GE Gas Turbine For Mechanical AplicationDocument14 pagesGE Gas Turbine For Mechanical AplicationMohamed OmarNo ratings yet
- N - Data-ns-docs-Spark-App - Data-Spare Part sheets-CA (M) - 5 - Feb12 - EdA PDFDocument4 pagesN - Data-ns-docs-Spark-App - Data-Spare Part sheets-CA (M) - 5 - Feb12 - EdA PDFMohamed OmarNo ratings yet
- Axial Comp On OffDocument4 pagesAxial Comp On OffMohamed OmarNo ratings yet
- Uidelines For The RiggerDocument4 pagesUidelines For The RiggerMohamed OmarNo ratings yet
- Tips Needed - How To Diagnose A Badly Rigged Plane - Backcountry PilotDocument8 pagesTips Needed - How To Diagnose A Badly Rigged Plane - Backcountry PilotMohamed OmarNo ratings yet
- 5 Lifetime Extension For SiemensDocument21 pages5 Lifetime Extension For SiemensMohamed Omar100% (3)
- N Data Ns Docs Spark App Data Spare Part Sheets CA (M) 5 Feb12 EdADocument4 pagesN Data Ns Docs Spark App Data Spare Part Sheets CA (M) 5 Feb12 EdAMohamed OmarNo ratings yet
- Old MathJax Webview Kindly Answer The Data Ang Com...Document10 pagesOld MathJax Webview Kindly Answer The Data Ang Com...LOREN MAE BULAYBULAYNo ratings yet
- Heat Trasnfer Lab. GF N. 109Document24 pagesHeat Trasnfer Lab. GF N. 109Aljebre MohmedNo ratings yet
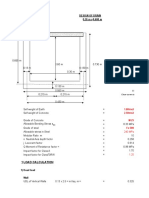
- Design of Drain 0.30 M X 0.600 M: 1 Load CalculationDocument68 pagesDesign of Drain 0.30 M X 0.600 M: 1 Load CalculationAnil SuryawanshiNo ratings yet
- Mole Concept IDocument8 pagesMole Concept ISohil Paudel100% (2)
- Table (Thermal Conductivity of Various Materials at 0 C)Document8 pagesTable (Thermal Conductivity of Various Materials at 0 C)seraj ibramemNo ratings yet
- Solar Aircraft Final Seminar Report PDFDocument39 pagesSolar Aircraft Final Seminar Report PDFRohit HarpudeNo ratings yet
- Andrade EqDocument10 pagesAndrade EqHima Bindu KolliNo ratings yet
- Conventions Concerning Electric and Magnetic Circuits PDFDocument36 pagesConventions Concerning Electric and Magnetic Circuits PDFArunTomarNo ratings yet
- 12 The Hand Warmer Design ChallengeDocument2 pages12 The Hand Warmer Design ChallengeMohommad YawariNo ratings yet
- Chapter 3 Work and Energy MethodDocument23 pagesChapter 3 Work and Energy Methoddudescape100% (1)
- Electricity: By: Saurabh SinghDocument15 pagesElectricity: By: Saurabh SinghSaurabh SinghNo ratings yet
- Internal Combustion EngineDocument20 pagesInternal Combustion EngineRowin Mark Sabornido33% (3)
- Science - 2ND SummativeDocument2 pagesScience - 2ND SummativeericksonNo ratings yet
- Atoms From The Eyes of Philosophers and ScientistDocument32 pagesAtoms From The Eyes of Philosophers and ScientistDonita BinayNo ratings yet
- HeatDocument163 pagesHeatSrMoonSengChoo100% (1)
- Solubility ExpressionsDocument7 pagesSolubility ExpressionsYuppie Raj100% (1)
- Boyles LawDocument29 pagesBoyles LawmerzechrisNo ratings yet
- 2022 Maharashtra State Board Important QuestionDocument17 pages2022 Maharashtra State Board Important Questionjayesh pandeyNo ratings yet
- The Discovery of Schumann Resonance: CapacitorsDocument5 pagesThe Discovery of Schumann Resonance: Capacitorssagor sagorNo ratings yet
- L3-BEKG2433-Three Phase Part 2 PDFDocument9 pagesL3-BEKG2433-Three Phase Part 2 PDFVievie Le BluewberrietrufflesNo ratings yet
- Unit - I: Sri Vidya College of Engineering & Technology Oed - Question Bank - Unit - 1Document6 pagesUnit - I: Sri Vidya College of Engineering & Technology Oed - Question Bank - Unit - 1Jai RamNo ratings yet
- Issue No 64 - Goodman and Other Related DiagramsDocument2 pagesIssue No 64 - Goodman and Other Related DiagramsAdiKurdiNo ratings yet
- Determination of Specific Rate Constant of ReactionDocument6 pagesDetermination of Specific Rate Constant of ReactionRafid JawadNo ratings yet
- Charpy Test ReportDocument8 pagesCharpy Test ReportMuhammad ZulkarnainNo ratings yet
- Unraveling The Mysteries of Dark MatterDocument2 pagesUnraveling The Mysteries of Dark Matterdragon knightNo ratings yet
- Stress Analysis Report PALLET 1255Document19 pagesStress Analysis Report PALLET 1255andresNo ratings yet
- R&AC Assign # 1Document22 pagesR&AC Assign # 1Hassan TalhaNo ratings yet
- Energy in A Collision Practice QuestionsDocument6 pagesEnergy in A Collision Practice Questionsrana elshaNo ratings yet
- Wave Force On Vertical WallsDocument55 pagesWave Force On Vertical WallsFares YaredNo ratings yet
- Conservation of MomentumDocument5 pagesConservation of Momentumytharth.sabharwal.1981No ratings yet