You might also like
- Chapter 2-Gear SystemDocument26 pagesChapter 2-Gear SystemNui Yuhu KuwNo ratings yet
- GearsDocument20 pagesGearsFarhad Noruzi100% (14)
- Rack and Pinion Gears InformationDocument6 pagesRack and Pinion Gears InformationifyNo ratings yet
- Gear 1Document9 pagesGear 1Ariyant CreativeNo ratings yet
- Acceleration of A Gear System-1Document7 pagesAcceleration of A Gear System-1Umer YounasNo ratings yet
- Uses of Bevel Gears in Hand Drills, Automobiles, and MoreDocument9 pagesUses of Bevel Gears in Hand Drills, Automobiles, and MoreAwais Asghar KhanNo ratings yet
- Acceleration of a geared system experiment: ω (j) / ω (i) = t (i) / t (j)Document11 pagesAcceleration of a geared system experiment: ω (j) / ω (i) = t (i) / t (j)jihad hasanNo ratings yet
- Bevel Gear Design Project MainDocument66 pagesBevel Gear Design Project MainJACKPOT LY100% (2)
- Assignment 1 - Closed Loop DynamicsDocument12 pagesAssignment 1 - Closed Loop DynamicsTharaka AmarasiriNo ratings yet
- CH 13Document27 pagesCH 13Sanjay KumarNo ratings yet
- Tutorial - Spur GearDocument2 pagesTutorial - Spur GearPrince KumarNo ratings yet
- Mechanical Drives Gear SelectionDocument46 pagesMechanical Drives Gear Selectionganga6013No ratings yet
- Struts 3.0Document11 pagesStruts 3.0LegendaryN50% (2)
- Gearbox Design Project ReportDocument2 pagesGearbox Design Project ReportAnonymous dWtqWj4qjNo ratings yet
- ENGD 3036 - Diesel Combustion TestDocument24 pagesENGD 3036 - Diesel Combustion TestLegendaryNNo ratings yet
- FEA Assignment - Lucas Dos Santos Almeida p13175018Document19 pagesFEA Assignment - Lucas Dos Santos Almeida p13175018Lucas AlmeidaNo ratings yet
- Effect of Increased Center Distance on Gear Teeth Contact Ratio and StressDocument21 pagesEffect of Increased Center Distance on Gear Teeth Contact Ratio and StressDavide MaranoNo ratings yet
- Dynamic Force Analysis ProblemsDocument8 pagesDynamic Force Analysis Problemsa c s KumarNo ratings yet
- ClutchesDocument12 pagesClutchesAbebaw AyeleNo ratings yet
- Module IV: Gears and Gear TrainsDocument38 pagesModule IV: Gears and Gear TrainsSuraj VinayNo ratings yet
- Assignment ClutchDocument624 pagesAssignment ClutchSubhash KNo ratings yet
- The Great Eggscape: Corey Kelvin Group 73 Nizam Umayr PatriciaDocument7 pagesThe Great Eggscape: Corey Kelvin Group 73 Nizam Umayr PatriciaLegendaryNNo ratings yet
- Gear TrainDocument26 pagesGear Trainraaz1007No ratings yet
- Gear Box Design Assignment S2 2012Document10 pagesGear Box Design Assignment S2 2012Nang TruongNo ratings yet
- Design and Analysis of GearDocument35 pagesDesign and Analysis of GearABnB InnovationsNo ratings yet
- Rack and Pinion Gear DesignDocument32 pagesRack and Pinion Gear DesignSrini KumarNo ratings yet
- Belt DrivesDocument17 pagesBelt DrivesAbebe AyingdaNo ratings yet
- Final Year Project: ENGD 3800: Student Name: W.M.C.K.WEERAKOON Student ID: P2646146Document12 pagesFinal Year Project: ENGD 3800: Student Name: W.M.C.K.WEERAKOON Student ID: P2646146Tharaka AmarasiriNo ratings yet
- Principle of Epicyclic GearingDocument11 pagesPrinciple of Epicyclic GearingAnuj AwasthiNo ratings yet
- INVOLUTE SPUR GEARS TERMINOLOGY AND MESHINGDocument13 pagesINVOLUTE SPUR GEARS TERMINOLOGY AND MESHINGjiteshpaul100% (1)
- Machine Design & Drawing - II - GEARSDocument12 pagesMachine Design & Drawing - II - GEARSSenthil KumarNo ratings yet
- Low Node DensityDocument22 pagesLow Node Densityanu swamiNo ratings yet
- 6.acceleration of Gear SystemDocument9 pages6.acceleration of Gear SystemMuhammed Shameem N Edavannappara50% (2)
- Design of a Two-Stage GearboxDocument131 pagesDesign of a Two-Stage Gearboxnigusu sisayNo ratings yet
- Gear Trains - Lecture 10Document22 pagesGear Trains - Lecture 10priyankar007No ratings yet
- Eclipse Gearbox Wind TurbineDocument9 pagesEclipse Gearbox Wind TurbinePankaj KatreNo ratings yet
- Spur GearDocument67 pagesSpur GearJeky KurniawanNo ratings yet
- Spur GearsDocument8 pagesSpur GearstopjobNo ratings yet
- GearsDocument14 pagesGearsZulhilmi Chik TakNo ratings yet
- Square root and piecewise function M-filesDocument1 pageSquare root and piecewise function M-filesDjody Virgiawan Ramadhan0% (1)
- Design of Machine Elements: (Project Based Lab) Design Project:1 Belt DrivesDocument25 pagesDesign of Machine Elements: (Project Based Lab) Design Project:1 Belt DrivesSurajNo ratings yet
- Stress Reduction in Spur Gears Using Aero-Fin Shaped HolesDocument11 pagesStress Reduction in Spur Gears Using Aero-Fin Shaped HolesJojee MarieNo ratings yet
- Input Parameters: Compartment With Thermally Thick/Thin BoundariesDocument3 pagesInput Parameters: Compartment With Thermally Thick/Thin BoundariesgfgfNo ratings yet
- Final ReportDocument45 pagesFinal ReportKuppu Raj100% (1)
- Design of Clutch Plate For Light Motor Vehicle NewDocument14 pagesDesign of Clutch Plate For Light Motor Vehicle NewKedar BardeNo ratings yet
- Design and Optimization of Front Wheel AssemblyDocument69 pagesDesign and Optimization of Front Wheel Assemblynikhil pandkarNo ratings yet
- Diesel Final SubmsisionDocument26 pagesDiesel Final Submsisionsaad hussainNo ratings yet
- Belt Drives: Power Transmission DevicesDocument16 pagesBelt Drives: Power Transmission Devicesniaz kilamNo ratings yet
- Road Performance PDFDocument8 pagesRoad Performance PDFwanawNo ratings yet
- ME 114 Engineering Drawing II Gear DrawingDocument12 pagesME 114 Engineering Drawing II Gear Drawingpradeep315No ratings yet
- Tooth ThicknessDocument9 pagesTooth ThicknessPraveen VundrajavarapuNo ratings yet
- Spur GearDocument98 pagesSpur Geargautham_93No ratings yet
- Load Testing of GearboxesDocument4 pagesLoad Testing of Gearboxesvijaykumarn100% (1)
- Departmental of Mechanical Engineering Me 213: Manufacturing Practicle Lab Notes On Gears and Gear CuttingDocument7 pagesDepartmental of Mechanical Engineering Me 213: Manufacturing Practicle Lab Notes On Gears and Gear Cuttingnisteelroy100% (1)
- Gear System Fundamentals: Types, Applications & Power TransmissionDocument28 pagesGear System Fundamentals: Types, Applications & Power Transmissionazim100% (1)
- Bda20303 Chapter 1-Gear SystemDocument27 pagesBda20303 Chapter 1-Gear SystemWan SamiraNo ratings yet
- CH 08Document77 pagesCH 08abdallah ghannamNo ratings yet
- Thesis report (1)Document72 pagesThesis report (1)Mayur ShetNo ratings yet
- Niosh PDD TTT2 PDFDocument5 pagesNiosh PDD TTT2 PDFDanielRaoNo ratings yet
- Chapter 5-MechanismDocument28 pagesChapter 5-MechanismDanielRaoNo ratings yet
- Isometric HornDocument1 pageIsometric HornDanielRaoNo ratings yet
- Niosh PDD TTT2 PDFDocument5 pagesNiosh PDD TTT2 PDFDanielRaoNo ratings yet
- Chapter 2-Belt Drive SystemDocument29 pagesChapter 2-Belt Drive SystemDanielRao100% (1)
- Acoustic Measurements: M. Vorl AnderDocument31 pagesAcoustic Measurements: M. Vorl AnderDanielRaoNo ratings yet
- Niosh PDD TTT2 PDFDocument5 pagesNiosh PDD TTT2 PDFDanielRaoNo ratings yet
- Isometric HornDocument1 pageIsometric HornDanielRaoNo ratings yet
- Niosh PDD TTT2 PDFDocument5 pagesNiosh PDD TTT2 PDFDanielRaoNo ratings yet
- Radiography Inspection NDT Sample Test Report Format PDFDocument2 pagesRadiography Inspection NDT Sample Test Report Format PDFDanielRaoNo ratings yet
- SalerioDocument28 pagesSalerioRizqaFebrilianyNo ratings yet
- Chapter 3-BalancingDocument29 pagesChapter 3-BalancingDanielRaoNo ratings yet
- Niosh PDD Sho 2019 PDFDocument15 pagesNiosh PDD Sho 2019 PDFAl- ImanuddinNo ratings yet
- Bolospeed RC CalculatorDocument4 pagesBolospeed RC CalculatorDanielRao56% (9)
- Book 1Document1 pageBook 1DanielRaoNo ratings yet
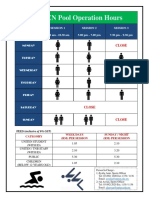
- Pool Operation Hours (Usual)Document1 pagePool Operation Hours (Usual)DanielRaoNo ratings yet
- Internal Rate of Return (IRR) Analysis: Lecture No. 24 Contemporary Engineering EconomicsDocument22 pagesInternal Rate of Return (IRR) Analysis: Lecture No. 24 Contemporary Engineering EconomicsDanielRaoNo ratings yet
- FIND THE BOOKS OF THE BIBLEDocument6 pagesFIND THE BOOKS OF THE BIBLEDanielRaoNo ratings yet
- Kl/kajang Trip (3 Days 2 Nights) 02/12/16-04/12/16 First Day (02/12/2016)Document1 pageKl/kajang Trip (3 Days 2 Nights) 02/12/16-04/12/16 First Day (02/12/2016)DanielRaoNo ratings yet
- Unsteady Exp Data N GraphsDocument6 pagesUnsteady Exp Data N GraphsDanielRaoNo ratings yet
- Chapter 4-FrictionDocument32 pagesChapter 4-FrictionDanielRao100% (1)
- Cell Group ActivityDocument15 pagesCell Group ActivityDanielRaoNo ratings yet
- MEMB322 Mini Project: Design an Innovative Baby StrollerDocument1 pageMEMB322 Mini Project: Design an Innovative Baby StrollerDanielRaoNo ratings yet
- Final Exam QuestionsDocument6 pagesFinal Exam QuestionsDanielRaoNo ratings yet
- Bode Solu (1) 2Document11 pagesBode Solu (1) 2DanielRaoNo ratings yet
- Kampus Putrajaya Draft Examination Timetable Semester 1 20162017 - 2Document4 pagesKampus Putrajaya Draft Examination Timetable Semester 1 20162017 - 2DanielRaoNo ratings yet
- Resignation LetterDocument1 pageResignation LetterDanielRaoNo ratings yet
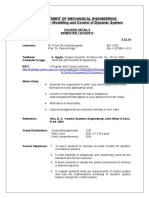
- Course Outline MESB323 SEM 1 (1617)Document3 pagesCourse Outline MESB323 SEM 1 (1617)DanielRaoNo ratings yet
- Course Description (MESB323) - PremDocument10 pagesCourse Description (MESB323) - PremDanielRaoNo ratings yet
- NIST 0001 Rev B - Structure Gauge EnvelopesDocument32 pagesNIST 0001 Rev B - Structure Gauge Envelopes4493464No ratings yet
- Common Rail Catalogue (2010)Document86 pagesCommon Rail Catalogue (2010)Syam Rukmana88% (8)
- Bangladesh Railway e Ticket PDFDocument1 pageBangladesh Railway e Ticket PDFMD. MOMINUL ISLAM100% (1)
- Case Study: One World Trade Center, New York: Kenneth Lewis Nicholas HoltDocument6 pagesCase Study: One World Trade Center, New York: Kenneth Lewis Nicholas HoltAastha ShahNo ratings yet
- Metro RailDocument59 pagesMetro Railகீர்த்திவாசன் தமிழன்50% (2)
- Sleeper BoqDocument1 pageSleeper Boqakshay marewarNo ratings yet
- Cross PassagewaysVsStairs EdenbaumDocument10 pagesCross PassagewaysVsStairs EdenbaumtangouzeNo ratings yet
- Sic Code TableDocument6 pagesSic Code TableKatz EscañoNo ratings yet
- Bangladesh Railway: Journey InformationDocument1 pageBangladesh Railway: Journey InformationJahangir Alom SumonNo ratings yet
- Catenary-Free Tramway Systems: Functional and Cost-Benefit Analysis For A Metropolitan AreaDocument21 pagesCatenary-Free Tramway Systems: Functional and Cost-Benefit Analysis For A Metropolitan AreamoisesramosNo ratings yet
- Judge Rutherford arrives to lead 1928 Bible Students conventionDocument80 pagesJudge Rutherford arrives to lead 1928 Bible Students conventionMario MoralesNo ratings yet
- Malaysia Tourism Promotion BoardDocument8 pagesMalaysia Tourism Promotion BoardSelvam LathaNo ratings yet
- Railway Reservation System ProjectDocument19 pagesRailway Reservation System ProjectShobhit SahuNo ratings yet
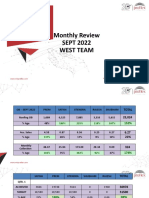
- Monthly Review Meeting - Oct 22Document16 pagesMonthly Review Meeting - Oct 22raj rathodNo ratings yet
- Student accommodation options near Northumbria University City CampusDocument1 pageStudent accommodation options near Northumbria University City CampusYousra ZafarNo ratings yet
- U10 2016 Catalog USDocument20 pagesU10 2016 Catalog USRamon BorbaNo ratings yet
- Transportation Vocabulary Matching Exercise ESL Worksheets For Kids and New Learners 8629Document2 pagesTransportation Vocabulary Matching Exercise ESL Worksheets For Kids and New Learners 8629ErwinNo ratings yet
- Indian Railway Organizational StructureDocument1 pageIndian Railway Organizational Structurethyvivek100% (2)
- Introduction To Non Destructive Testing (NDT)Document35 pagesIntroduction To Non Destructive Testing (NDT)sajuxNo ratings yet
- Cavitex&CalaxDocument12 pagesCavitex&CalaxCrizza Mae CobarrubiasNo ratings yet
- Indoor Vaccum Circuit Breaker - 11kV & 33kV: EVB-1225/ EVB-3625Document10 pagesIndoor Vaccum Circuit Breaker - 11kV & 33kV: EVB-1225/ EVB-3625Kannan SreekumarNo ratings yet
- Mt Fuji Day Trip from TokyoDocument4 pagesMt Fuji Day Trip from TokyoRohan Kulkarni100% (1)
- RPF Constable Recruitment Qualified CandidatesDocument287 pagesRPF Constable Recruitment Qualified CandidatesVivek YadavNo ratings yet
- Pa RTS, Operation and Maintenance Manual For Ultra-Lo'" Rigid Trolley ModelsDocument36 pagesPa RTS, Operation and Maintenance Manual For Ultra-Lo'" Rigid Trolley Modelspaulbw100% (1)
- 206-03 Front Disc BrakeDocument13 pages206-03 Front Disc BrakeMiguel AngelNo ratings yet
- Analyses of Pig Iron 1900Document230 pagesAnalyses of Pig Iron 1900OceanNo ratings yet
- 313 CDI Model PDFDocument5 pages313 CDI Model PDFDavid McgeeNo ratings yet
- 4sqmm Fuse Terminal Blocks with LED IndicationDocument2 pages4sqmm Fuse Terminal Blocks with LED IndicationAnonymous yvhc4zwNo ratings yet
- Transportation and Planning Assignment#2: Department of Civil EngineeringDocument11 pagesTransportation and Planning Assignment#2: Department of Civil EngineeringALi niaziNo ratings yet
- Superelevation DiagramsDocument1 pageSuperelevation DiagramsTapasNo ratings yet