Professional Documents
Culture Documents
Underwater Acoustic Communications and Networking PDF
Uploaded by
suryaOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Underwater Acoustic Communications and Networking PDF
Uploaded by
suryaCopyright:
Available Formats
PAPER
Underwater Acoustic Communications and
Networking: Recent Advances and Future
Challenges
AUTHORS ABSTRACT
Mandar Chitre The past 30 years have seen a growing interest in underwater acoustic communications
Shiraz Shahabudeen because of its applications in marine research, oceanography, marine commercial operations,
Acoustic Research Laboratory, National the offshore oil industry and defense. Continued research over the years has resulted in
University of Singapore improved performance and robustness as compared to the initial communication systems.
Milica Stojanovic In this paper, we aim to provide an overview of the key developments in point-to-point com-
Massachusetts Institute of Technology munication techniques as well as underwater networking protocols since the beginning of
this decade. We also provide an insight into some of the open problems and challenges facing
researchers in this eld in the near future.
I. Introduction protocols for such networks. In this paper, A. Channel Equalization
T he past three decades have seen a
growing interest in underwater acoustic
communications because of its applications
in marine research, oceanography, marine
we do not attempt to provide an exhaustive
survey of all research in the eld, but instead
concentrate on ideas and developments that
are likely to be the keystone of future under-
The shallow water acoustic communi-
cation channel exhibits a long delay spread
because of numerous multipath arrivals
resulting from surface and bottom inter-
commercial operations, the offshore oil water communication networks. actions. Movement of transducers, ocean
industry and defense. Continued research surface, and internal waves lead to rapid
over the years has resulted in improved time variation and, consequently, a high
performance and robustness as compared II. Underwater Doppler spread in the channel. Coherent
to the initial communication systems. A Communications modulation schemes such as phase shift
series of review papers provides an excel- High-speed communication in the keying (PSK) along with adaptive deci-
lent history of the development of the eld underwater acoustic channel has been sion feedback equalizers (DFE) and spatial
until the end of the last decade (Baggeroer, challenging because of limited bandwidth, diversity combining have been shown to
1984; Catipovic, 1990; Stojanovic, 1996; extended multipath, refractive properties of be an effective way of communication in
Kilfoyle and Baggeroer, 2000). In this the medium, severe fading, rapid time vari- such channels (Stojanovic et al., 1993).
paper, we aim to provide an overview of ation and large Doppler shifts. In the initial However, the long delay spread (often hun-
the key developments in the eld since the years, rapid progress was made in deep water dreds of symbols) and rapid time variation
beginning of this decade. We also hope to communication, but the shallow water of the channel often makes this approach
provide an insight into some of the open channel was considered difcult. In the computationally too complex for real-time
problems and challenges facing researchers past decade, signicant advances have been implementations.
in this eld in the near future. made in shallow water communication.
This paper is divided into two main
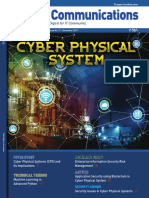
sectionsone on underwater communica- FIGURE 1
tions and another on underwater network-
ing. Section II concentrates on research on Basic structure of a turbo DFE
point-to-point communication issues such
as channel modeling, modulation, coding
and equalization. Key advances in these areas
have enabled us to establish reliable high-
speed underwater communication links.
Using these links as a foundation, under-
water networks can be established. Section
III focuses on research on algorithms and
Spring 2008 Volume 42, Number 1 103
Although the underwater channel has per, the authors compare the performance DFE to reduce errors. Although MAP
a long impulse response, the multipath of recursive least square (RLS) estimation, equalization is computationally intensive,
arrivals are often discrete. This opens up spare channel impulse response estimation per-survivor processing (PSP) helps reduce
the possibility of using a sparse equalizer and the proposed method. the number of trellis states used in channel
with tap placement based on the actual Sparse partial response equalizers equalization. Experimental testing at 1 km
channel response. This can potentially (sPRE) exploit the sparse nature of the range in very shallow waters with a verti-
dramatically reduce the number of required underwater channel to shorten the impulse cal 8-hydrophone receiver array showed
taps and hence lead to a lower complexity, response of the channel. When combined that the algorithm performed signicantly
faster channel tracking and an enhanced with a low-complexity belief propagation better than DFE. The algorithm however
performance. In Stojanovic et al. (1999), (BP) detector, the residual inter-symbol had some difculty with sparse channels;
the authors proposed an algorithm to track interference (ISI) from the sPRE can be future work combining sparse equalization
the channel explicitly and determine the used for multipath diversity. Data collected techniques with turbo equalization may
tap placement for the DFE based on this during an experiment in Kauai was used help address this difculty.
channel estimate. The equalizer and the to demonstrate a communication scheme The computational complexity of MAP
channel estimator are separately updated based on a sPRE with a BP detector (Roy equalization increases exponentially with
throughout the packet. The channel esti- et al., 2006). channel length. Even with PSP, this com-
mator can update either the whole estimate Conventional equalization techniques plexity can be too high for practical imple-
or a set of selected channel coefcients at require a training period during which the mentation. In Blackmon et al. (2002), the
one time, depending on computational and equalizer converges. However, blind equali- authors propose a soft-input DFE structure
channel considerations. The algorithm uses zation techniques use only the statistical to replace the MAP algorithm in the turbo
spatial diversity by multi-channel combin- properties of the signal and do not require equalizer. The data from multiple receivers
ing before equalization. an explicit training sequence. They typi- can be combined to gain spatial diversity. A
Another algorithm for robust automat- cally converge slower than training based joint DFE is optimal for such multichan-
ed DFE tap placement in sparse channels is methods and therefore their use has been nel combining, but is often too complex.
presented in Lopez and Singer (2001). The limited to long or continuous data streams. The authors considered alternatives with
algorithm alternates between tap placement In Labat et al. (2003), the authors show separate DFE for each receiver and found
for the feedforward and feedback lters in that a blind DFE, when combined with an that a set of DFE with a log-likelihood ratio
the DFE. A stopping criterion is dened in appropriate iterative procedure, provides (LLR) output yields good performance.
terms of the estimated mean square error good performance on short data bursts. To avoid error propagation problems with
(MSE) rather than a xed number of taps. DFE structures suffer from error DFE, some researchers have successfully
As increased model order leads to increased propagation due to the feedback of er- used a linear equalizer instead of the DFE
estimation noise, a model order penalty roneous decisions in the loop. Hence in the turbo equalizer structure (Oberg et
is imposed in the optimization. When powerful forward error correction (FEC) al., 2006).
used with multiple receivers for exploiting codes are needed to ensure low bit error Many conventional receivers have dif-
spatial diversity, the algorithm uses the rate (BER) communication. Turbo codes culty in shallow water channels due to
same number of taps in each receiver. An are a class of powerful codes that utilize the large Doppler spread induced by rapid
empirically tuned version of the algorithm iterative information exchange between channel variation. In a two-part paper,
was successfully demonstrated in an experi- two decoders to correct errors. Inspired by Eggen et al. (2000, 2001) use a channel
ment using a 4-hydrophone receiver array. this idea, researchers have developed turbo tracker with a linear decoder to combat
The algorithm placed an average of 10 equalization techniques where iterative large Doppler spread. The tracker uses a
feedforward taps and 25 feedback taps; this interactions between the equalizer and a modied RLS algorithm and frequency
is a signicantly smaller number than the decoder result in joint estimation, equali- domain lters known as Doppler lines to
number of taps required in a conventional zation and decoding (Sozer et al., 2001). estimate channel coefcients. The decoder
DFE for shallow water communication. The data to be transmitted is encoded, makes use of the channel tracker coef-
In Weichang and Preisig (2007), the interleaved and transmitted. The receiver cients in order to perform minimum mean
authors develop a sparse channel estima- treats the combination of the encoder, square error (MMSE) decoding.
tion technique based on the delay-Dop- interleaver and channel as a serial con- The use of direct sequence code division
pler-spread function representation of catenated code. A maximum a posteriori multiple access (DS-CDMA) has some ben-
the channel. As this representation is an probability (MAP) equalizer is used along ets such as multi-user access and low prob-
approximation of a rapidly time-varying with a decoder as the two components of ability of detection (LPD). In Stojanovic
channel, it captures the channel structure the turbo decoder. The turbo decoders and Freitag (2006), the authors explored the
and its dynamics simultaneously. In the pa- output is used in the feedback loop of the use of a DFE to combat ISI in DS-CDMA
104 Marine Technology Society Journal
systems. A symbol decisions feedback based communication systems effectively and its mirror image is used to encode the
(SDF) DFE uses the symbol decisions utilize spatial diversity at the transmitter data. PPC requires that the spacing between
after de-spreading on the feedback path. rather than the receiver. In fact, the spatial signals is more than the delay spread of the
As the symbols in a DS-CDMA system are focusing precludes the use of multiple channel. Although this results in relatively
relatively long, a DFE using SDF is not able receivers for spatial diversity, but opens up low symbol rates, the use of PPM allows
to track rapidly varying channels. For such the possibility of spatial multiplexing and many bits to be packed in each symbol. The
channels, a chip hypothesis feedback (CHF) low probability of intercept (LPI) com- use of LFM signals also enables low-complex-
can help track the channel at the chip rate munications. Although TRM helps reduce ity Doppler correction. The authors present
rather than the symbol rate. For M-ary delay spread of the channel, it does not results from a successful PPC communication
signal constellations, the complexity of the eliminate ISI completely. By implementing experiment at ranges of up to 10 km using a
CHF is at least M times higher than the a DFE at a TRM receiver, the communica- single transmitter and receiver. Another com-
SFD as M different hypotheses have to be tion performance can be further improved munication system using PPC is described
tracked. However, the advantage of a CHF (Edelmann et al., 2005). In a TRM-based in Rouseff et al. (2001). This system uses a
was clearly demonstrated at high spreading communication system, a probe signal has probe signal followed by several data-carrying
factors during a shallow water experiment in to be rst transmitted from the receiver PSK symbols. The system was successfully
Italy. The authors expect that the perform- to the transmitter. The transmitter then demonstrated at ranges up to 5 km using
ance difference would be more apparent in uses a time-reversed version of this signal a single transmitter and a 14-hydrophone
a mobile environment as one would expect to convey information. As the channel receiver-array. More recently, Gomes et al.
the channel to change more rapidly. changes over time, the probe signal has (2006) presents results from an experiment
If the statistics of the errors in channel to be retransmitted to sample the channel off the west coast of Portugal where the
estimation are known, DFE or linear equal- but decoherence times up to several tens of authors compare the performance of several
izer performance can be estimated (Preisig, minutes were observed at frequencies of 3.5 methods including equalization, PPC and
2005). The error estimate can be split into kHz during experiments. combinations of both methods. In Song et
the minimum achievable error and the excess Since TRM does not eliminate ISI al. (2006), the authors study the benets of
error. The excess error component is strongly completely, it is ISI-limited at high signal spatial diversity in PPC communications.
affected by rough sea conditions. Through strengths. In Stojanovic (2005), the author They also show that adaptive equalization
a scattering function analysis, it was also presents a detailed analysis of several solu- can be effectively combined with PPC to
shown that the rate of change of propagation tions to deal with the ISI in a TRM system estimate and eliminate residual ISI. In the ex-
path length for the surface bounced arrival if the channel response is known. By intro- perimental results presented, gains of up to 5
is a primary contributor to the error. This ducing optimal lters at the transmitter and dB were obtained through equalization in the
suggests that the ability to effectively track receiver, ISI can be completely eliminated. case of a xed transmitter/receiver. When the
the surface bounced arrival may provide an However, this is prohibitively complex and transmitter was moving, the channel varied
improved equalizer performance. requires channel knowledge at both ends. more rapidly and the gain from equalization
An excellent trade-off between complexity increased to 13 dB. In another experiment, it
B. Phase Conjugation and performance can be found by limiting was found that continuous channel updates
Due to the symmetry of the linear lter adjustment to the array-side of the and Doppler tracking are required before
wave equation, if the sound transmitted communication system. The paper presents time reversal in order to achieve accept-
from one location is received at other strong analytical results and upper bounds able performance in the presence of ocean
locations, reversed and retransmitted, it on system performance, but the ideas have variability (Song et al., 2008). This ocean
focuses back at the original source location. yet to be experimentally tested. Imperfect variability was shown to be primarily a result
This is the principle behind time reversal channel estimation resulting from noise of interaction of the acoustic eld with the
mirrors (TRM) or its frequency domain may limit the performance of the algo- dynamic ocean surface.
equivalentactive phase conjugation. rithms described in the paper. The computational simplicity of phase
The temporal compression effect of TRM A closely related ideapassive phase conjugation-based communication systems
reduces the delay spread of the channel conjugation (PPC)uses the cross-correla- makes them extremely attractive. However,
while the spatial focusing effect improves tion of two consecutive signals transmitted the use of such systems is constrained by
signal-to-noise ratio (SNR) and reduces from the transmitter to the receiver to convey the quasi-static channel requirement that
fading. An experiment conducted in 1999 information. In Hursky et al. (2001), the is fundamental to the idea. The quasi-static
demonstrated such a TRM communication authors describe one such system which uses constraint may be somewhat relaxed in
system in shallow waters (Edelmann et al., pulse position modulation (PPM) with PPC cases where an adaptive equalizer is used
2002). The larger the number of transmit- for communication. The spacing between a in conjunction with a phase conjugation
ters, the better the TRM focus. Thus, TRM linear frequency modulated (LFM) signal scheme. Rapidly changing channels result-
Spring 2008 Volume 42, Number 1 105
ing from moving communication nodes the basis of further physics-based channel good OFDM performance (BER < 2s10-3)
may limit the use of phase conjugation in modeling research in the future. at ranges up to 6 km. At the same ranges,
mobile applications. Channel modeling in the surf zone is es- the DSSS performance was found to be
pecially difcult because of the large impact signicantly poorer.
C. Channel Modeling of the rapidly time-varying surface on the OFDM equalization is simplified
A good understanding of the com- acoustics. The scattering of acoustic signals greatly if a guard interval longer than the
munications channel is important in the off shoaling surface gravity waves results in delay spread is allowed between consecu-
design and simulation of a communica- a time-varying channel impulse response tive OFDM symbols. This guard period is
tion system. A good review of channel and occasional caustics characterized by usually implemented as a cyclic prex to
modeling work prior to the year 2000 intense, rapidly uctuating arrivals (Preisig maintain orthogonality of the sub-carriers.
has been presented in Bjerrum-Niese and and Deane, 2004). Through a combination However, when the delay spread is long,
Lutzen (2000). of experimental measurements and propa- the prex length can become undesirably
At high frequencies appropriate for gation modeling, the authors showed that long and affect the efciency of transmis-
shallow water communications, ray theory the high intensity arrivals were often due to sion signicantly. In Morozov and Preisig
provides the framework for determin- focusing by surface gravity waves and caus- (2006), the authors explore the use of
ing the coarse multipath structure of the tic formation. Hence most channel impulse maximum likelihood sequence detection
channel. However, such a model does not response algorithms have difculty coping (MLSD) on individual sub-carriers when
encapsulate the time-varying nature of the with surf zones. Further work in this area the symbol period is smaller than the de-
channel. By augmenting this model with a is needed to help improve performance of lay spread. An algorithm to perform joint
time-varying surface model, a shallow water communication systems in surf zones. channel estimation and MLSD using a
channel can be simulated (Bjerrum-Niese et An additive Gaussian noise assumption low complexity PSP was proposed and
al., 1996). As acknowledged by the authors, is used commonly in the development of experimentally demonstrated in the paper.
the primary limitation of such a channel most signal processing and communication Channel shortening techniques such as
model is the availability of an accurate and techniques. Although this assumption is sPRE may also be used in future OFDM
calibrated surface time-variation model. valid in many environments, some under- systems to reduce the prex length and
Moreover the time-variation in the channel water channels exhibit highly impulsive improve bandwidth efciency.
is not limited to surface reected arrivals. noise. Signal detection (Chitre et al., 2006) To conserve energy, the cyclic prex can
If the received signal is a sum of a large and Viterbi decoding (Chitre et al., 2007) be replaced by a zero prex (ZP). Optimal
number of multipath arrivals, each of techniques developed for impulsive noise de-modulation of ZP-OFDM requires a
which are modeled as a complex Gaussian models such as the symmetric A-stable computationally intensive matrix inversion
stochastic processes, the resulting model is noise have been shown to perform better operation. In Li et al. (2006), the authors
the well-known Rayleigh fading channel. in warm shallow waters dominated by use pilot-based channel estimation with a
Some researchers model the shallow water snapping shrimp noise. low complexity overlap-add de-modulation
channel as a Rayleigh fading channel but to implement an OFDM system. By using
others challenge that assumption, especially D. Multi-carrier Modulation maximum-ratio combining over the data
when discrete arrivals can clearly be seen in Multi-carrier modulation is an attrac- from multiple receivers, the authors utilize
the channel response. There has been no tive alternative to a broadband single-car- the spatial diversity available to further
consensus among researchers on the model rier communication system. By dividing increase the robustness of the system.
applicable in shallow waters. Recently, a the available bandwidth into a number of When using coded OFDM, consecutive
ray theory-based multipath model, where narrower bands, orthogonal frequency di- symbols are often striped across sub-carriers
the individual multipath arrivals are mod- vision multiplexing (OFDM) systems can to reduce the error correlation resulting
eled as Rayleigh stochastic processes, has perform equalization in frequency domain, from fading. However, impulse noise
been shown to describe the medium range thus eliminating the need for complex present in some environments can affect
very shallow water channel accurately time-domain equalizers. OFDM modu- multiple sub-carriers simultaneously and
(Chitre, 2007). The physics resulting in lation and de-modulation can easily be hence generate correlated errors. The use of
the time-variation of each arrival is not implemented using fast Fourier transforms a channel interleaver with coded OFDM
fully understood, but it may result from (FFT). In shallow waters in the Mediter- allows symbols to be distributed over a
micro-multipath or internal waves. Theo- ranean sea, an experiment was conducted to frequency-time plane, thus allowing the
retical and experimental studies of acoustic compare the performance of OFDM with code to make maximal use of frequency and
propagation through anisotropic shallow direct sequence spread spectrum (DSSS), time diversity offered by OFDM (Chitre et
water environments in the presence of in- both using differential PSK modulation al., 2005). The knowledge of error correla-
ternal waves (Badiey et al., 2007) may form (Frassati et al., 2005). The authors reported tion resulting from impulsive noise could
106 Marine Technology Society Journal
be used in future decoding algorithms to techniques such as MAP and maximum decode the MIMO signals. A widely linear
improve decoding performance. likelihood sequence estimation (MLSE) model of the Alamouti code was used for
The narrowband sub-carriers in an grows exponentially with the number of joint equalization and decoding, with a
OFDM system make the system very transmit antennas. In Roy et al. (2004), the linear equalizer chosen for its low complex-
sensitive to Doppler shift. As the carrier authors explore the use of space-time trellis ity. The Alamouti code uses two transmit
frequency in underwater acoustic systems codes (STTC) and layered space-time codes antennas and multiple receive antennas to
is low as compared to typical Doppler shift (LSTC) with various sub-optimal decod- achieve spatial diversity gains without a di-
experienced as a result of movement, the ing techniques. For STTC, the proposed rect increase in data throughput. Although
communication systems have to cope with receiver consists of explicit phase tracking this algorithm was successfully tested in a
wideband Doppler. In the case of OFDM, and timing recovery loops which are jointly trial in the Baltic Sea, the gains resulting
this results in non-uniform Doppler shift optimized with a MIMO DFE. The equali- from MIMO processing were questionable
across sub-carriers. As a maximum likeli- zation and decoding is jointly performed in the trial as a single dominant path with
hood solution for Doppler compensation using the powerful trellis structure of very slow fading was observed in most of
is computationally far too expensive to be STTC. This limits the error propagation the data.
practical, a simpler solution is needed. In that is inherent in DFE. For LSTC, the To achieve the promise of increased
Stojanovic (2006), the author presents an equalization is performed iteratively (turbo throughput and spatial diversity in practical
algorithm for non-uniform Doppler com- equalization). The authors demonstrated MIMO systems, the transducers in trans-
pensation in OFDM systems based on a the benets of MIMO over single-input mit and receive arrays must be placed with
single adaptively estimated parameter. The single-output (SISO) underwater com- spacing larger than the spatial coherence
algorithm was tested on experimental data munication systems through a successful scale at the frequency of interest. In Yang
from a ZP-OFDM system with multiple experiment in the Mediterranean Sea us- (2007), the author theoretically and experi-
receivers to correct a Doppler shift of about 7 ing 2 transmit projectors for STTC and 4 mentally studies the gain from spatial diver-
Hz (0.02%). By adaptive MMSE combining transmit projectors for LSTC. sity given parameters such as the number of
of data from a minimum of 3 receivers, the In another set of experiments with 6 transducers and the spacing between them.
author was able to successfully demonstrate transmit projectors, a spatial modulation Further research is needs to be conducted
the proposed algorithm. In Sharif et al. scheme with an outer block code, inter- to better understand issues surrounding
(2000), the authors present a preprocessor leaver and an inner trellis-coded modula- transducer locations, especially as their
that estimates Doppler shift by measuring tion (TCM) was demonstrated (Kilfoyle et placement may be constrained in mobile
the time between two known signals and al., 2005). A joint DFE and phase-locked systems such as autonomous underwater
removes the Doppler shift using a computa- loop (PLL) was used for each data stream vehicles (AUV).
tionally efcient linear interpolator. Being a at the receiver. Low latency soft decisions
preprocessor, the technique can be used with were released to support the DFE. The ex- F. Summary
any type of modulation and equalization. periments demonstrated that with the pro- Robust incoherent techniques have
The technique was tested in the North Sea posed spatial modulation scheme offered been well studied in the past. Although they
using a prototype communication system increased bandwidth and power efciency still play a signicant role in low data rate
and demonstrated to work well at speeds of as compared to signals constrained to tem- communication applications that demand
2.6 m/s and accelerations of 0.9 m/s2. The poral modulation. For ISI-limited chan- robust and low-complexity solutions, most
authors expect the technique to work at nels, spatial modulation offers a unique of the new advances in the past decade have
higher speeds and accelerations. and effective means to increase data rates been in the area of coherent communica-
when simply increasing transmission power tions. Advances in DFE algorithms have
does not. Recently, results from a MIMO- resulted in robust algorithms that can be
E. Spatial Modulation OFDM experimental data obtained during used to equalize underwater communica-
Information theoretic studies have the AUV Fest in Panama City, Florida in tion channels. Channel characteristics
shown that the capacity of a channel in- 2007 have been presented (Li et al., 2007). (such as sparseness) or channel models
creases linearly with the minimum of the Nearly error-free performance was achieved may be used to reduce noise in channel
number of transmit and receive antennas. with a 2-transmitter 4-receiver setup at estimates. When combined with error
This increase in capacity translates to a cor- ranges up to 1.5 km using a -rate low- correction coding and iterative (turbo)
responding increase in achievable data rate density parity check (LDPC) codes at a algorithms, DFE algorithms can benet
through the use of multiple input multiple coded data rate of 12 kbps. from the higher reliability of the feedback
output (MIMO) processing techniques In Nordenvaad and Oberg (2006), the loop. In OFDM systems, equalization or
and space-time coding. The computa- authors consider the channel as a 1-rate partial equalization may be used to reduce
tional complexity of optimal detection code and use turbo decoding framework to the effective channel delay spread and im-
Spring 2008 Volume 42, Number 1 107
prove performance. OFDM systems suffer Figure 2. The network consists of a set of protocols can be typically be classified
from high sensitivity to Doppler shift. As underwater local area networks (UW-LAN, into contention-based (non-orthogonal)
new algorithms for wideband Doppler also known as clusters or cells), connected and contention-free (scheduled, orthogo-
compensation for OFDM systems develop, to each other via gateway nodes. A gateway nal or deterministic) protocols. Some of
we expect that success of OFDM in wireless node provides administration, security and the simpler contention-based protocols
networks could be replicated in underwater routing between multiple UW-LANs and include half duplex ALOHA, ALOHA
networks. Although phase conjugation other wireless or wired networks. with acknowledgements (ACK) and re-
provides an innovative low complexity so- In a cluster, the exact choice of physical tries, medium access collision avoidance
lution to equalization problems, constraints layer protocol may depend on factors such (MACA)-based half duplex protocol using
on channel variation may limit the use of as specic channel conditions, security RTS/CTS handshaking (Sozer et al., 2000).
algorithms based on phase conjugation. reasons, processing capability, data rate The traditional contention-free MAC pro-
The use of multiple receivers for spatial requirements and energy efciency. In view tocols include time division multiple access
diversity gains is becoming common in of the limited bandwidth underwater, a (TDMA), frequency division multiple ac-
underwater communication systems. With high level of cross layer optimizations or cess (FDMA), CDMA and space division
MIMO processing techniques, we expect transcending of traditional layer boundaries multiple access (SDMA).
that more communication systems will may be needed to provide high data rates. In contention-based protocols the
include multiple transmitters as well and We now review some of the recent work key protocol family is based on MACA
derive benets from the increased theoreti- and future challenges. The key focus of our originally proposed for terrestrial networks
cal channel capacity. As researchers master review will be on the data link layer (DLL) (Karn, 1990). Such protocols use RTS,
the techniques required for point-to-point and network topology. CTS, DATA, ACK sequences, as illustrated
communication links in the next 5-10 in Figure 3. These protocols were shown to
years, we expect that the research emphasis G. Datalink Layer be effective for underwater use compared
on underwater networking will increase. Key differences between terrestrial radio with scheduled protocols early on in the
wireless networking and underwater acous- Seaweb project (Rice et al., 2000). The au-
tic networking are the large propagation thors observe that in the physical and MAC
III. Underwater Networking delay of sound, extremely low point-to- layers, adaptive modulation and power
A recent survey on research in un- point data rates and high raw BER. Thus it control are the keys to maximizing both
derwater protocol development presents is often proposed that media access control channel capacity and channel efciency.
a good overview of the subject (Akyildiz (MAC) protocols for underwater networks Handshaking permits addressing, ranging,
et al., 2006). The state of the art in cur- be developed ground up and not directly channel estimation, adaptive modulation,
rent underwater networking technology adopt existing terrestrial protocols (Jiejun et and power control. RTS/CTS exchanges
is oriented towards a setup as shown in al., 2005; Heidemann et al., 2006). MAC channel measurement so that the DATA
frame can be sent using optimal param-
FIGURE 2 eters. In Sozer et al. (2000), the authors re-
A topology for underwater networks view MAC protocols such as ALOHA and
MACA and present results on throughput
and delay performance. MACA-based pro-
tocols are found to be highly suited in many
scenarios underwater where scalability is
important and time-synchronization is not
available (Kebkal et al., 2005; Heidemann
et al., 2006; Molins and Stojanovic, 2006;
Xie and Cui, 2006). However in some
sensor networks, RTS/CTS mechanisms
could perform poorly due to latency issues
and inefciency for small payload packets
(Turgay and Erdal, 2006).
Protocol extensions and enhancements
of MACA have been investigated to suit
them better to underwater channel. For
example, a WAIT command extension has
been investigated in Sozer et al. (2000) and
108 Marine Technology Society Journal
Doukkali et al. (2006). A WAIT command Although the effectiveness of carrier sens- travel signicant distances may render the
is send back by the receiver if it is currently ing is limited by long propagation delays power setting inappropriate.
busy and intends to send a CTS later on. in underwater networks, it can nevertheless Among contention-free protocols, there
In Rice et al. (2000), instead of using provide some collision avoidance against seems to be general consensus that FDMA
ACK packets, selective ARQ is initiated by nearby nodes. Time-slotting can also be is inefcient for underwater applications
recipient should it not receive packets in a implemented to enhance performance (Rice et al., 2000). TDMA is better than
specied time. Guo et al. (2006) proposed (Fullmer and Garcia-Luna-Aceves, 1995). FDMA but requires good time synchro-
to counter the wasted bandwidth of using FAMA in its original form is quite unsuited nization in nodes. In some publications
RTS, CTS, DATA, ACK resulting from to underwater networks, but with enhance- CDMA is favored over TDMA and FDMA
the high propagation delay, through a new ments such as slotting, it can be used under- (Proakis et al., 2001), and over MACA
protocol called PCAP. It requires accurate water effectively (Molins and Stojanovic, based protocols (Jun-Hong et al., 2006;
time synchronization. They propose to 2006). Distance aware-collision avoidance Chan and Motani, 2007). PCLS, a loosely
pipeline other actions while waiting for protocol (DACAP) is based on MACA synchronized form of TDMA with non-
CTS from receiver. Packet trains can greatly (Peleato and Stojanovic, 2006). It adds overlapping timeslots, has been proposed
improve the performance of protocols such a warning message if a RTS is overheard for low capacity sensor networks (Turgay
as MACA (Garcia-Luna-Aceves and Full- while waiting for a reply to its own RTS. and Erdal, 2006).
mer, 1998; Molins and Stojanovic, 2006; While waiting for reply, if another CTS or Some analytical results are presented for
Shahabudeen et al., 2007). By dividing the a warning is heard, a random back off is a variant called FAMA-CF (Collision Free)
DATA segment into packets, RTS/CTS used. Optimal power control for DACAP is that applies only to a centralized topology
collisions only affects a small number of studied in Dolc and Stojanovic (2007). The in (Kebkal et al., 2005). Mathematical
packets and do not result in complete optimal power is found to be that which analysis for slotted-FAMA is presented in
retransmission of the DATA, as shown in minimizes connectivity. A RTS/CTS-based Molins and Stojanovic (2006). Xie and Cui
Figure 3. Floor acquisition multiple access handshaking scheme can be expected to (2006) compare random access protocols
(FAMA), a family of protocols of which perform well in dynamic mobile AUV such as ALOHA with collision avoidance
MACA is a variant, was originally proposed networks too, since during the delay of at handshaking scheme such as MACA and
for terrestrial networks. Control of the most a few seconds between RTS and CTS, present some mathematical analysis. Gib-
channel is assigned to at most one station typical AUV velocities and distances imply son et al. (2007) present one of the rst
in the network at any given time and uses little change in geometry and consequently analyses of contention-based protocols in
carrier sensing (absent in MACA) and puts appropriate power levels. However, DATA a multi-hop string network.
restrictions on RTS/CTS time durations. packet trains long enough for the AUVs to Contention-based and contention-free
protocols are both being used in many
FIGURE 3
underwater networks today. The choice
Packet trains in MACA protocol is driven by the exact constraints and
requirements such as time synchroniza-
tion, delay-tolerance, time criticality and
reliability in messaging, ad-hoc network
establishment, number of expected nodes,
nature of trafc (continuous or bursty),
sleep-wake schedules in sensors and mobil-
ity. In the future, more rigorous analytical
results and accurate simulations are needed
to further verify the many ideas put forward
for underwater DLL and MAC.
DLL/MAC aspects such as energy
conservation have also been looked into
recently. PCLS as discussed earlier (Turgay
and Erdal, 2006) incorporates a power
control and sleep-wakeup scheme. Another
example on energy minimization (Rodoplu
and Min Kyoung, 2005) shows an ultra-
low duty cycle MAC protocol focusing
on energy conservation and not data rate.
Spring 2008 Volume 42, Number 1 109
The paper makes some over-simplifying data, provided it contains a minimum changes are presented in Salva-Garau and
assumptions that the propagation delay is number of packets (Chitre and Motani, Stojanovic (2003).
constant and there is no clock drift. Nodes 2007). This allows a le transfer protocol An underwater acoustic cellular net-
transmit sporadically and each transmission to be designed where the individual packets work is an extension of the cluster topology
includes a preamble that species the next do not have to be acknowledged and is and analysis of frequency re-use between
intended transmission. Listeners decide suited for large le transfers. The sender adjacent clusters and optimal cell-radius
their wakeup times based on this preamble can stop transmitting after it has decided selection criteria has been carried out re-
and sleep till packets are expected from that the probability that the receiver has cently (Stojanovic, 2007). A related work
transmitters. The objective is to minimize not received enough packets is smaller on channel allocation and scheduling
the fraction of energy wasted in collisions. than a preset threshold or the receiver can protocol for cellular networks is presented
For a transmit duty cycle of 0.4%, a 3% loss acknowledge complete delivery. in Peleato and Stojanovic (2007). An
due to collisions is obtained. Assuming no For optimal performance, the DLL interesting example of a gateway node is
loss due to bit errors, a physical layer data needs to adapt packet size, batch size and the smart buoy where a surface raft that
rate of 5 kbps only yields an effective data timers based on measured link metrics. Re- can maintain its position is equipped with
rate per node of 5 s 0.4% s 97% = 19.4 ply timeout can be adapted for MACA RTS global positioning system (GPS), surface
bps. A sensor wakeup schemeadaptive based on inter-node distance (Doukkali radio and acoustic modems (Curcio et
wakeup schedule function (AWSF), suit- et al., 2006). Inter-node distances can be al., 2006).
able for underwater sensor systems uses a known through direct exchange of position
time cyclic wakeup schedule for each node information or through acoustic ranging I. Network Layer and Routing
such that at any one time only a few nodes techniques implemented in many modems. A review of underwater network pro-
are active. Time asynchronous situations For optimal performance, the DLL could tocols until the year 2000 can be found in
also work with AWSF except for a loss help adapt the FEC code rate at the physi- Sozer et al. (2000). Routing overheads for
and change in neighborhood connectivity cal layer. underwater networks should be kept as
(Wong et al., 2006). In general, sleep and minimal as possible due to the extremely
wakeup schemes focus on energy savings H. Clustered and Cellular Topologies low data rates. In a typical clustered topol-
at the cost of bandwidth efciency due Fully connected peer-to-peer topologies ogy, the nodes communicate to a gateway
to the usage of wakeup preamble signals without the need for routing were com- node using a single hop while the gateway
and time delays required to switch modes. monly used earlier (Proakis et al., 2001), node handles all routing. In Xie and Gib-
The improvements in energy efciency but such networks suffer from near-far son (2001), the authors present a similar
are therefore at the expense of data rate. power problems. A clustered network to- topology assuming full-duplex modems.
Such schemes are meant for long term pology helps extend and scale the network The gateway node manages route discovery
underwater deployments that can cope and easily accommodates connectivity to through the use of probe messages to its
with extremely low data rates and very other networks. One CDMA code per neighbors. Route information is cached
long latencies. cluster and spatial re-use of codes is consid- unless errors are reported in future relaying.
One essential service choice offered by ered in Salva-Garau and Stojanovic (2003). In Foo et al. (2004) AODV-based rout-
DLL to higher layers is reliability. In pro- TDMA is used within each cluster. Nodes ing together with MACAW is proposed.
tocols such as MACA with packet trains, are assumed to be able to handle multiple AODV is reactive and routing is initiated
this involves ACKs and negative ACKs CDMA codes simultaneously. Similar only when requested. The authors modify
(NACK) that indicate received or lost scheme in which clusters are allocated the standard AODV to use reverse link
data and retries for lost data. Packet size or either different CDMA codes or FDMA pointers by assuming bi-directionally sym-
train/group size adaptation is required to bands is found in Casari et al. (2007). metric links. Carlson et al. (2006) discuss
optimize performance. Analytical results Within each cluster TDMA is used but location aware source routing for dynamic
for optimal packet size as a function of the it is not clear how the inter-cluster com- AUV networks, a modication from the
acoustic link parameters (transmission rate, munications are handled. The protocol DSR protocol originally designed for
link distance, and error probability) and the called FAMA-CF in Kebkal et al. (2005) terrestrial networks. It uses TDMA and
train or group size have been presented in uses MACA-like RRTS, RTS, CTS, DATA, known TDMA frame timings to com-
Stojanovic (2005). An alternative novel ap- ACK handshaking to communicate with pute ranges based on propagation delay.
proach to provide reliable data transfer uses the central node. The central node initi- Ranges are used to estimate local topology
rate-less codes, a class of erasure correcting ates the request for RTS (RRTS) to its peer to determine routes. The authors suggest
codes where the source data packets are nodes. Both analytical and experimental the use of a recursive state-estimation lter
converted into virtually an innite stream results are presented in the paper. Algo- algorithm, but have not implemented it in
and can be reconstructed from received rithms for cluster formation and dynamic their study.
110 Marine Technology Society Journal
Cross layer optimization of the routing networks pose many challenges. Stojanovic simulation software written in languages
algorithms with the DLL is required for et al. (2002) describe a TDMA protocol for such as C++ (Carlson et al., 2004). The
optimal performance; much work remains AUVs. Exchanged packets contain position simulated channel needs to account for
to be done in this area. The Delay Tolerant information for localization. Simulated propagation delay and path loss. Spheri-
Networking Research Group (http://www. results from a FAMA-based MAC for an cal spreading model provides a rst level
dtnrg.org) has developed an architecture AUV network were presented in Molins approximation. More complicated models
(known as DTN) that focuses on unreli- and Stojanovic (2006). could be implemented depending on the ac-
able networks that uses store and forward AUVs are sometimes equipped with curacy needed (Raysin et al., 1999; Chitre,
techniques and future developments in multiple modems or a single modem 2007). Computationally efcient physics-
underwater network layer can benet from with multiple frequency band transducers based underwater channel models have been
this. In Pompili et al. (2006), the authors (Freitag et al., 2005). The effective use of developed (Xie et al., 2006). The physical
propose routing algorithms for delay-sensi- multiple modems optimized for different layer is typically assumed to be a half duplex
tive and delay-tolerant networks. In the de- ranges in an AUV network using random system as it is usually the case in many com-
lay-tolerant case links are chosen based on access protocols is explored in Shahabudeen mercial acoustic modems. A simple physical
energy minimization. In the delay-sensitive et al. (2007). As AUVs move around dur- layer model that computes BER and packet
case, the algorithm is further constrained ing a collaborative mission, the inter-node loss using received SNR can be used. Direct
by avoiding retransmissions of corrupted separations may vary from few tens of BER against range curves could be used if
packets at the DLL. Thus effectively imple- meters to several kilometers and different empirical data for a channel is available.
ments cross-layer optimization by involving modems are used at different ranges based Packets may also be lost due to collisions.
the DLL in the networking problem. on exchanged position information. Such AUV networking studies requires motion
The idea of mixing data at intermediate multi-channel or multi-modem nodes modeling (Carlson et al., 2004).
nodes in a network is at the root of net- will also be needed in clustered or cellular Some authors explicitly state the limita-
work coding, a technique introduced in a topologies (to act as gateway nodes) and tions of the simulators they used (Carlson
seminal paper in the year 2000 and gaining this is an exciting area for future research. and Beaujean et al., 2004) but often none
popularity since (Ahlswede et al., 2000). Efficient multi-hop and ad-hoc packet are reported. The accuracy of simulations
In a recent paper, network coding schemes routing protocols for AUV networks also has to be addressed in the future. It is
for underwater networks are considered are in their infancy and a potential research important to move towards standardized
(Lucani et al., 2007). In a concatenated area for the future (Jiejun et al., 2005). open-source simulation frameworks in the
relay network, the authors compare via underwater network research community.
simulation two routing schemes based on K. Simulation Studies
end-to-end acknowledgements, two based Simulations using appropriate software L. Standardization
on link-by-link acknowledgements and two have been norm in underwater network The underwater networking research
based on network coding. At high loads, research even more so than in terrestrial community can benefit hugely from
the transmission delays in network-coded networks, because of the difculty and standardization. Standardized protocols
schemes were much better than in the cost in setting up sea trials and lack of for gateway access from external networks
other schemes. At low loads, the transmis- direct access to the physical layers of com- and routing would allow applications to
sion delays in all schemes were similar; mercial modems. Simulations provide a access underwater nodes easily. As a rst
however, the network-coded schemes had quick assessment of performance for new step towards this goal, the common control
lower power consumption as compared to and modied protocols before an actual language (CCL) specications for AUV
the other schemes. Network coding with implementation. Mathematical analysis networks outline a TCP/IP based protocol
implicit acknowledgements has the lowest often offers limited and very loose bounds for access to a CCL gateway (Stokey et
power consumption per node while pro- on complex network performance meas- al., 2005). Landline and GSM modems
viding low transmission delays. The use of ures. The network simulator needs a base typically use the AT command set to
network coding in underwater networks is software platform, an appropriate channel allow applications to communicate with
being explored only recently and remains a simulator and a physical layer simulator. them. The WHOI micro-modem supports
promising open research area. Base software platforms include com- a NMEA 0183 protocol (Freitag et al.,
mercial network software such as Opnet 2005). Most other commercial modems
J. AUV Networking used in Xie et al. (2006), open-source today provide support only for proprietary
As a result of the increasing applications network software such as NS2 used in protocols. Standardization on communica-
of AUVs, networking of mobile assets is Harris and Zorzi (2007), discrete event tions to acoustic modems would enable
currently a very active area of research. The simulation packages such as Omnet++ used applications to be easily integrated with
mobility and ad-hoc requirements for such in Shahabudeen et al. (2007), or custom various modems.
Spring 2008 Volume 42, Number 1 111
Modems internal stacks can be devel- FIGURE 4
oped adhering to standardized inter-layer
UNA layer interfaces
interfaces that allows interoperability and
portability of stack software from differ-
ent researchers. These can be used in real
implementations as well as simulation stud-
ies. The inter-layer interfaces may expose
optional settings such as FEC code-rates,
power control, etc to enable interoperable
cross-layer optimization. Modem vendors
may choose to expose some of these ap- ing used. The physical layer of the WHOI components are mapped on to hardware
plication programming interfaces (APIs) micro-modem was published as a standard through device package and device con-
to the user to enable them to access lower (Freitag and Singh, 2000) and a commer- guration descriptor les.
layer functionality directly. Some initiatives cial modem maker Benthos implemented Standardization in underwater net-
towards this goal have started. In one initia- compatible modems (Freitag et al., 2005). working is still very much in its infancy. A
tive an underwater network architecture A related body of work on software radio, summary of interfaces and protocols that
(UNA) for modem network layers was a structured and modular concept for mo- could be standardized is shown in Figure 5.
proposed to standardize inter-layer mes- dem implementation, has been proposed Lack of technology is not the bottleneck for
sages (Chitre et al., 2006). Figure 4 shows for use in underwater modems (Jones, standardization, as most of the architectural
the recommended interfaces for each layer, 2007). In software radio, the bulk of the components have proprietary implementa-
with request, response and notication signal processing happens in software on tions in many projects around the world.
messages between layers. The UNA speci- DSPs and FPGAs. A software commu- Setting up an underwater network will be
cations include an optional framework nications architecture (SCA) initiated by just as easy as setting up a terrestrial WiFi
application programming interface (FAPI) U.S. Department of Defense allows den- network once standardization takes place
to eliminate direct coupling between layers ing software components descriptors in and users have choice of alternative com-
though the use of a messaging framework, extensible markup language (XML). The ponents from different vendors.
to abstract hardware and operating system
FIGURE 5
functionality and to help make layers eas-
ily portable. The CCL specications also Target interfaces for standardization
propose an application layer protocol for
AUV networks (Stokey et al., 2005).
The use of standardized open-source
simulation frameworks in the underwater
network research community will help pro-
vide results that can easily be reproduced by
others. Simulations from various research
groups can run on common simulation
platforms, if the simulation frameworks are
written conforming to standard layer inter-
faces. This will also enable the use of the
software used in simulation to be plugged
in directly to the actual modem hardware
that uses the same standard interfaces.
An important aspect of standardiza-
tion is the physical layer implementation
to enable greater interoperability between
modems made by different vendors. The
standards should allow for the existence
of different technology families such as
CDMA, OFDM, PSK, etc, with the
option of using control information to
convey which modulation scheme is be-
112 Marine Technology Society Journal
M. Summary protocols for AUV networks have been networks still remains an open research
MACA-based contention protocols proposed to provide a unied interface challenge. Standardization for underwater
and TDMA or CDMA-based contention- to higher layers. AODV and DSR-based networking is required to provide inter-
free protocols can be used in a UW-LAN lightweight routing protocols have been operability and ease of operation and help
depending on the exact requirements and proposed for underwater use. Efficient accelerate the research in the eld.
constraints. Multi-modem adaptive MAC routing for ad-hoc mobile underwater
List of Abbreviations
API Application programming interface MACA Medium access collision avoidance
AUV Autonomous underwater vehicle MAP Maximum a posteriori probability
AWSF Adaptive wakeup schedule function MIMO Multiple input multiple output
BER Bit error rate MLSD Maximum likelihood sequence detection
BP Belief propagation MLSE Maximum likelihood sequence estimation
CCL Common control language MMSE Minimum mean square error
CHF Chip hypothesis feedback MSE Mean square error
CTS Clear to send OFDM Orthogonal frequency division multiplexing
DACAP Distance aware-collision avoidance protocol PCM Phase-locked loop
DFE Decision feedback equalizers PPC Passive phase conjugation
DLL Data link layer PPM Pulse position modulation
DS-CDMA Direct sequence code division multiple access PSK Phase shift keying
DSSS Direct sequence spread spectrum PSP Per-survivor processing
DTN Delay tolerant network RLS Recursive least square
FAMA Floor acquisition multiple access RTS Request to send
FAMA-CF Floor acquisition multiple access (collision free) SCA Software communications architecture
FAPI Framework application programming interface SDF Symbol decisions feedback
FDMA Frequency division multiple access SDMA Space division multiple access
FEC Forward error correction SISO Single-input single-output
FFT Fast Fourier transform SNR Signal-to-noise ratio
GPS Global positioning system sPRE Sparse partial response equalizers
GSM Global system for mobile communications SSTC Space-time trellis codes
ISI Inter-symbol interference TCM Trellis-coded modulation
LDPC Low-density parity check TCP/IP Transmission control protocol/Internet protocol
LFM Linear frequency modulated TDMA Time division multiple access
LLR Log-likelihood ratio TRM Time reversal mirror
LPD Low probability of detection UNA Underwater network architecture
LPI Low probability of intercept UW-LAN Underwater local area network
LSTC Layered space-time codes XML Extensible markup language
MAC Media access control ZP Zero prex
References Badiey, M., B. G. Katsnelson, J. F. Lynch and Bjerrum-Niese, C. and R. Lutzen. 2000.
Ahlswede, R., N. Cai, S. Y. R. Li and R. W. S. Pereselkov. 2007. Frequency dependence and Stochastic simulation of acoustic commu-
Yeung. 2000. Network information ow. intensity uctuations due to shallow water nication in turbulent shallow water. IEEE J
IEEE Trans Inform Theory. 46(4):1204-1216. internal waves. J Acoust Soc Am. 122(2):747-760. Ocean Eng. 25(4):523-532.
Akyildiz, I. F., D. Pompili and T. Melodia. Baggeroer, A. 1984. Acoustic telemetry--An Blackmon, F., E. Sozer and J. Proakis. 2002.
2006. State-of-the-art in protocol research for overview. IEEE J Ocean Eng. 9(4):229-235. Iterative equalization, decoding, and soft
underwater acoustic sensor networks. ACM diversity combining for underwater acoustic
Bjerrum-Niese, C., L. Bjorno, M. A. Pinto
International Workshop on Underwater Net- channels. Oceans 02 MTS/IEEE.
and B. A. Quellec. 1996. A simulation tool
works (WUWNet), Los Angeles, USA. for high data-rate acoustic communication in
a shallow-water, time-varying channel. IEEE
J Ocean Eng. 21(2):143-149.
Spring 2008 Volume 42, Number 1 113
Carlson, E. A., P. P. Beaujean and E. An. Curcio, J. A., P. A. McGillivary, K. Fall, Freitag, L. and S. Singh. 2000. Multi-User
2004. Simulating communication during A. Maffei, K. Schwehr, B. Twiggs, C. Kitts Frequency Hopping Underwater Acoustic
multiple AUV operation. IEEE/OES and P. Ballou. 2006. Self-Positioning Smart Communication Protocol. WHOI Technical
Autonomous Underwater Vehicles. Buoys, The Un-Buoy Solution: Logistic Report.
Considerations using Autonomous Surface
Carlson, E. A., P. P. Beaujean and E. An. 2006. Freitag, L., M. Grund, S. Singh, J. Partan,
Craft Technology and Improved Communi-
Location-Aware Routing Protocol for Under- P. Koski and K. Ball. 2005. The WHOI
cations Infrastructure. OCEANS 2006.
water Acoustic Networks. OCEANS 2006. micro-modem: an acoustic communications
Dolc, A. P. and M. Stojanovic. 2007. Optimiz- and navigation system for multiple platforms.
Casari, P., S. Marella and M. Zorzi. 2007. A
ing the Transmission Range in an Acoustic OCEANS, 2005. Proceedings of MTS/IEEE.
Comparison of Multiple Access Techniques
Underwater Network. OCEANS07,
in Clustered Underwater Acoustic Networks. Freitag, L. E., M. Grund, J. Partan, K. Ball,
Vancouver, Canada.
IEEE Oceans 07, Aberdeen, Scotland. S. Singh and P. Koski. 2005. Multi-band acoustic
Doukkali, H., L. Nuaymi and S. Houcke. modem for the communications and navigation
Catipovic, J. A. 1990. Performance limitations
2006. Distributed MAC Protocols for aid AUV. MTS/IEEE OCEANS, 2005.
in underwater acoustic telemetry. IEEE J
Underwater Acoustic Data Networks.
Ocean Eng. 15(3):205-216. Fullmer, C. L. and J. J. Garcia-Luna-Aceves.
IEEE 64th Vehicular Technology Conference,
1995. loor Acquisition Multiple Access
Chan, C. Y. M. and M. Motani. 2007. An VTC-2006 Fall.
(FAMA) for Packet-Radio Networks. SIG-
Integrated Energy Efcient Data Retrieval
Doukkali, H., L. Nuaymi and S. Houcke. COMM 95, Cambridge, MA.
Protocol for Underwater Delay Tolerant Net-
2006. Power and distance based MAC
works. IEEE Oceans 07, Aberdeen, Scotland. Garcia-Luna-Aceves, J. J. and C. L. Fullmer.
algorithms for underwater acoustic networks.
1998. Performance of oor acquisition multiple
Chitre, M. 2007. A high-frequency warm OCEANS 2006.
access in ad-hoc networks. Third IEEE Sym-
shallow water acoustic communications
Edelmann, G. F., T. Akal, W. S. Hodgkiss, K. posium on Computers and Communications,
channel model and measurements. J Acoust
Seongil, W. A. Kuperman and S. Hee Chun. ISCC 98.
Soc Am. 122(5):2580-2586.
2002. An initial demonstration of underwater
Gibson, J., G. Xie, Y. Xiao and H. Chen.
Chitre, M., L. Freitag, E. Sozer, S. Shahabudeen, acoustic communication using time reversal.
2007. Analyzing the Performance of Multi-hop
M. Stojanovic and J. Potter. 2006. An IEEE J Ocean Eng. 27(3):602-609.
Underwater Acoustic Sensor Networks. IEEE
Architecture for Underwater Networks.
Edelmann, G. F., H. C. Song, S. Kim, W. Oceans 07, Aberdeen, Scotland.
OCEANS06 Asia Pacic IEEE. Singapore.
S. Hodgkiss, W. A. Kuperman and T. Akal.
Gomes, J., A. Silva and S. Jesus. 2006. Joint
Chitre, M. and M. Motani. 2007. On the 2005. Underwater acoustic communications
Passive Time Reversal and Multichannel
use of rate-less codes in underwater acoustic using time reversal. IEEE J Ocean Eng.
Equalization for Underwater Communications.
le transfers. OCEANS 2007 - Europe. 30(4):852-864.
OCEANS 2006.
Chitre, M., S. H. Ong and J. Potter. 2005. Eggen, T. H., A. B. Baggeroer and J. C.
Guo, X., M. R. Frater and M. J. Ryan.
Performance of coded OFDM in very shallow Preisig. 2000. Communication over Doppler
2006. A propagation-delay-tolerant collision
water channels and snapping shrimp noise. spread channels. Part I: Channel and receiver
avoidance protocol for underwater acoustic
OCEANS, 2005 MTS/IEEE. presentation. IEEE J Ocean Eng. 25(1):62-71.
sensor networks. MTS/IEEE OCEANS06,
Chitre, M., J. R. Potter and S. H. Ong. Eggen, T. H., J. C. Preisig and A. B. Baggeroer. Singapore.
2007. Viterbi Decoding of Convolutional 2001. Communication over Doppler spread
Harris, A. F. and M. Zorzi. 2007. On the
Codes in Symmetric -Stable Noise. IEEE channels. II. Receiver characterization
Design of Energy-efcient Routing Protocols
Trans Commun. 55(12). and practical results. IEEE J Ocean Eng.
in Underwater Networks. 4th Annual IEEE
26(4):612-621.
Chitre, M. A., J. R. Potter and S. H. Ong. Communications Society Conference on
2006. Optimal and Near-Optimal Signal Foo, K. Y., P. R. Atkins, T. Collins, C. Morley Sensor, Mesh and Ad Hoc Communications
Detection in Snapping Shrimp Dominated and J. Davies. 2004. A routing and channel- and Networks (SECON 07).
Ambient Noise. IEEE . Ocean Eng. access approach for an ad hoc underwater
Heidemann, J., Y. Wei, J. Wills, A. Syed and
31(2):497-503. acoustic network. MTS/IEEE OCEANS 04.
L. Yuan. 2006. Research challenges and
Frassati, F., C. Lafon, P. A. Laurent and J. M. applications for underwater sensor networking.
Passerieux. 2005. Experimental assessment IEEE Wireless Communications and Net-
of OFDM and DSSS modulations for use in working Conference, 2006. WCNC 2006.
littoral waters underwater acoustic communi-
cations. Oceans 2005 - Europe.
114 Marine Technology Society Journal
Hursky, P., M. B. Porter, J. A. Rice and V. K. Lopez, M. J. and A. C. Singer. 2001. A DFE Proakis, J. G., E. M. Sozer, J. A. Rice and
McDonald. 2001. Passive phase-conjugate coefcient placement algorithm for sparse M. Stojanovic. 2001. Shallow water acoustic
signaling using pulse-position modulation. reverberant channels. IEEE Trans Commun. networks. Communications Magazine, IEEE.
OCEANS, 2001 MTS/IEEE. 49(8):1334-1338. 39(11):114-119.
Jiejun, K., C. Jun-hong, W. Dapeng and Lucani, D. E., M. Medard and M. Stojanovic. Raysin, K., J. Rice, E. Dorman and S. Math-
M. Gerla. 2005. Building underwater ad-hoc 2007. Network coding schemes for under- eny. 1999. Telesonar network modeling and
networks and sensor networks for large scale water networks: the benets of implicit simulation. MTS/IEEE OCEANS 99.
real-time aquatic applications. IEEE Military acknowledgement. Proceedings of the second
Rice, J., B. Creber, C. Fletcher, P. Baxley, K.
Communications Conference, 2005. MIL- workshop on Underwater networks. Montreal,
Rogers, K. McDonald, D. Rees, M. Wolf, S.
COM 2005. Quebec, Canada, ACM.
Merriam, R. Mehio, J. Proakis, K. Scussel,
Jones, E. 2007. The Application of Software Molins, M. and M. Stojanovic. 2006. Slotted D. Porta, J. Baker, J. Hardiman and D.
Radio Techniques to Underwater Acoustic FAMA: a MAC protocol for underwater Green. 2000. Evolution of Seaweb under-
Communications. OCEANS 2007 - Europe. acoustic networks. MTS/IEEE OCEANS06. water acoustic networking. OCEANS 2000
MTS/IEEE.
Jun-Hong, C., K. Jiejun, M. Gerla and Z. Morozov, A. K. and J. C. Preisig. 2006.
Shengli. 2006. The challenges of building Underwater Acoustic Communications with Rodoplu, V. and P. Min Kyoung. 2005. An
mobile underwater wireless networks for Multi-Carrier Modulation. OCEANS 2006. energy-efcient MAC protocol for underwater
aquatic applications. Network, IEEE. wireless acoustic networks. MTS/IEEE
Nordenvaad, M. L. and T. Oberg. 2006.
20(3):12-18. OCEANS, 2005.
terative Reception for Acoustic Underwater
Karn, P. 1990. MACA - A new channel access MIMO Communications. OCEANS 2006. Rouseff, D., D. R. Jackson, W. L. J. Fox, C.
method for packet radio. ARRL/CRRL D. Jones, J. A. Ritcey and D. R. Dowling.
Oberg, T., B. Nilsson, N. Olofsson, M. L.
Amateur Radio 9th computer Networking 2001. Underwater acoustic communication
Nordenvaad and E. Sangfelt. 2006. Under-
Conference. by passive-phase conjugation: theory and
water communication link with iterative
experimental results. IEEE J Ocean Eng.
Kebkal, A., K. Kebkal and M. Komar. 2005. equalization. OCEANS 2006.
26(4):821-831.
Data-link protocol for underwater acoustic
Peleato, B. and M. Stojanovic. 2006. A MAC
networks. Oceans 2005 - Europe. Roy, S., T. Duman, L. Ghazikhanian, V.
protocol for Ad Hoc Underwater Acoustic
McDonald, J. Proakis and J. Zeidler. 2004.
Kilfoyle, D. B. and A. B. Baggeroer. 2000. Sensor Networks. WUWNet06.
Enhanced underwater acoustic communication
The state of the art in underwater acoustic
Peleato, B. and M. Stojanovic. 2007. A performance using space-time coding and
telemetry. IEEE J Ocean Eng. 25(1):4-27.
Channel Sharing Scheme for Underwater processing. OCEANS 04 MTS/IEEE.
Kilfoyle, D. B., J. C. Preisig and A. B. Bag- Cellular Networks. IEEE Oceans 07,
Roy, S., T. M. Duman and V. McDonald.
geroer. 2005. Spatial modulation experiments Aberdeen, Scotland.
2006. Error Rate Improvement in Underwater
in the underwater acoustic channel. IEEE J
Pompili, D., T. Melodia and I. F. Akyildiz. MIMO Communications Using Sparse Partial
Ocean Eng. 30(2):406-415.
2006. Routing algorithms for delay-insensitive Response Equalization. OCEANS 2006.
Labat, J., G. Lapierre and J. Trubuil. 2003. and delay-sensitive applications in underwater
Salva-Garau, F. and M. Stojanovic. 2003.
Iterative equalization for underwater acoustic sensor networks. ACM Conference on Mobile
Multi-cluster protocol for ad hoc mobile un-
channels potentiality for the TRIDENT Computing and Networking (MobiCom),
derwater acoustic networks. OCEANS 2003.
system. OCEANS 2003, Proceedings. Los Angeles, USA.
Shahabudeen, S., M. Chitre and M. Motani.
Li, B., S. Zhou, M. Stojanovic and L. Freitag. Preisig, J. C. 2005. Performance analysis of
2007. A multi-channel MAC protocol for
2006. Pilot-tone based ZP-OFDM Demodu- adaptive equalization for coherent acoustic
AUV networks. IEEE Oceans 07. Aberdeen,
lation for an Underwater Acoustic Channel. communications in the time-varying ocean
Scotland.
OCEANS 2006. environment. J Acoust Soc Am. 118(1):263-278.
Sharif, B. S., J. Neasham, O. R. Hinton
Li, B., S. Zhou, M. Stojanovic, L. Freitag, J. Preisig, J. C. and G. B. Deane. 2004. Surface
and A. E. Adams. 2000. A computationally
Huang and P. Willett. 2007. MIMO-OFDM wave focusing and acoustic communications
efcient Doppler compensation system for
Over An Underwater Acoustic Channel. in the surf zone. J Acoust Soc Am.
underwater acoustic communications. IEEE
OCEANS07. Vancouver, Canada. 116(4):2067-2080.
J Ocean Eng. 25(1):52-61.
Spring 2008 Volume 42, Number 1 115
Song, A., M. Badiey, H. C. Song, W. S. Stojanovic, M., L. Freitag and M. Johnson.
Hodgkiss, M. B. Porter and KauaiEx-Group. 1999. Channel-estimation-based adaptive
2008. Impact of ocean variability on coherent equalization of underwater acoustic signals.
underwater acoustic communications during OCEANS 99 MTS/IEEE.
the Kauai experiment (KauaiEx). J Acoust
Stojanovic, M., L. Freitag, J. Leonard and
Soc Am. 123(2):856-865.
P. Newman. 2002. A network protocol for
Song, H. C., W. S. Hodgkiss, W. A. Kuperman, multiple AUV localization. MTS/IEEE
W. J. Higley, K. Raghukumar, T. Akal and M. Oceans 02.
Stevenson. 2006. Spatial diversity in passive
Stokey, R. P., L. E. Freitag and M. D. Grund.
time reversal communications. J Acoust Soc
2005. A Compact Control Language for
Am. 120(4):2067-2076.
AUV acoustic communication. Oceans 2005
Sozer, E. M., J. G. Proakis and F. Blackmon. - Europe.
2001. Iterative equalization and decoding
Turgay, K. and C. Erdal. 2006. A Mac Protocol
techniques for shallow water acoustic channels.
for Tactical Underwater Surveillance Networks.
OCEANS, 2001 MTS/IEEE.
Military Communications Conference, 2006.
Sozer, E. M., M. Stojanovic and J. G. Proakis. MILCOM 2006.
2000. Underwater acoustic networks. IEEE
Weichang, L. and J. C. Preisig. 2007. Estimation
J Ocean Eng. 25(1):72-83.
of Rapidly Time-Varying Sparse Channels.
Stojanovic, M. 1996. Recent advances in IEEE J Ocean Eng. 32(4):927-939.
high-speed underwater acoustic communica-
Wong, Y. F., L. H. Ngoh, W. C. Wong and
tions. IEEE J Ocean Eng. 21(2):125-136.
W. K. G. Seah. 2006. Intelligent Sensor
Stojanovic, M. 2005. Optimization of a data Monitoring For Industrial Underwater Appli-
link protocol for an underwater acoustic cations. 2006 IEEE International Conference
channel. Oceans 2005 - Europe. on Industrial Informatics.
Stojanovic, M. 2005. Retrofocusing techniques Xie, G., J. Gibson and L. Diaz-Gonzalez.
for high rate acoustic communications. 2006. Incorporating Realistic Acoustic Propa-
J Acoust Soc Am. 117(3):1173-1185. gation Models in Simulation of Underwater
Acoustic Networks: A Statistical Approach.
Stojanovic, M. 2006. Low Complexity
OCEANS 2006.
OFDM Detector for Underwater Acoustic
Channels. OCEANS 2006. Xie, G. G. and J. H. Gibson. 2001. A
network layer protocol for UANs to address
Stojanovic, M. 2007. Frequency reuse
propagation delay induced performance limi-
underwater: capacity of an acoustic cellular
tations. MTS/IEEE OCEANS, 2001.
network. Proceedings of the second workshop
on Underwater networks. Montreal, Quebec, Xie, P. and J.-H. Cui. 2006. Exploring Random
Canada, ACM. Access and Handshaking Techniques in
Large-Scale Underwater Wireless Acoustic
Stojanovic, M., J. Catipovic and J. G.
Sensor Networks. OCEANS 2006.
Proakis. 1993. Adaptive multichannel
combining and equalization for underwater Yang, T. C. 2007. A Study of Spatial Processing
acoustic communications. J Acoust Soc Am. Gain in Underwater Acoustic Communications.
94(3):1621-1631. IEEE J Ocean Eng. 32(3):689-709.
Stojanovic, M. and L. Freitag. 2006. Multi-
channel Detection for Wideband Underwater
Acoustic CDMA Communications. IEEE J
Ocean Eng. 31(3):685-695.
116 Marine Technology Society Journal
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 0ven Toaster Grill Recipe BookDocument32 pages0ven Toaster Grill Recipe Booksurya50% (2)
- Orthogonal Frequency Division Multiple Access Fundamentals and Applications PDFDocument628 pagesOrthogonal Frequency Division Multiple Access Fundamentals and Applications PDFSatadal GuptaNo ratings yet
- Department of Ece Lesson Plan Subject: Subject Code: CLASS: IV Year A' & B'Document5 pagesDepartment of Ece Lesson Plan Subject: Subject Code: CLASS: IV Year A' & B'Balasubramoniam ChokalingamNo ratings yet
- Linux Security On HP Servers: Security Enhanced Linux: Technical IntroductionDocument13 pagesLinux Security On HP Servers: Security Enhanced Linux: Technical IntroductionsuryaNo ratings yet
- 2-Kohonen Self-Organizing Maps (Som) : Patterns Associated With That ClusterDocument11 pages2-Kohonen Self-Organizing Maps (Som) : Patterns Associated With That ClustersuryaNo ratings yet
- Machine Learning in Advanced PythonDocument7 pagesMachine Learning in Advanced PythonsuryaNo ratings yet
- Productflyer - 978 3 540 34437 7Document1 pageProductflyer - 978 3 540 34437 7suryaNo ratings yet
- Neural Control2 PDFDocument5 pagesNeural Control2 PDFsuryaNo ratings yet
- Neural Networks For Control Systems: G. Linear and Nonlinear ProgrammingDocument3 pagesNeural Networks For Control Systems: G. Linear and Nonlinear ProgrammingsuryaNo ratings yet
- Neural Networks: Robert Kozma, Steven Bressler, Leonid Perlovsky, Ganesh Kumar VenayagamoorthyDocument2 pagesNeural Networks: Robert Kozma, Steven Bressler, Leonid Perlovsky, Ganesh Kumar VenayagamoorthysuryaNo ratings yet
- A Comprehensive Study of Artificial Neural NetworksDocument7 pagesA Comprehensive Study of Artificial Neural NetworkssuryaNo ratings yet
- Research of Data Mining Based On Neural Networks: Xianjun NiDocument4 pagesResearch of Data Mining Based On Neural Networks: Xianjun NisuryaNo ratings yet
- (Ksat - Ii) : CLASS - L..K.GDocument25 pages(Ksat - Ii) : CLASS - L..K.Gsurya100% (1)
- 3G NSN Terms VocabularyDocument18 pages3G NSN Terms VocabularyNary RasolomaharoNo ratings yet
- Harris An PRC 117 (C) SatcomDocument2 pagesHarris An PRC 117 (C) SatcomJeff CherryNo ratings yet
- IT-702 WMC Assignment Unit 1: Q.N o Questions MarksDocument3 pagesIT-702 WMC Assignment Unit 1: Q.N o Questions MarksamaniNo ratings yet
- CSE 413 OHT 2 Paper Solution V1.0Document10 pagesCSE 413 OHT 2 Paper Solution V1.0Khalil UllahNo ratings yet
- Multiple Access-FDMA, CDMA, TDMA, SDMA, DSSS, FHSS, ALOHA, PACKET RADIO...Document82 pagesMultiple Access-FDMA, CDMA, TDMA, SDMA, DSSS, FHSS, ALOHA, PACKET RADIO...gk_gbu100% (4)
- Code Division Multiple Access PresentationDocument40 pagesCode Division Multiple Access PresentationUmer KhanNo ratings yet
- Wireless CommunicationDocument99 pagesWireless CommunicationVaishali VaishuNo ratings yet
- Ddos AttackDocument69 pagesDdos AttackDanee Boy PanjaitanNo ratings yet
- ATT GSM CourseDocument638 pagesATT GSM CourseJhon Vargas ReyesNo ratings yet
- Op CdmaDocument19 pagesOp Cdmarosev15No ratings yet
- $MP 026 18Document12 pages$MP 026 18Safura BegumNo ratings yet
- Lecture 1423813824Document74 pagesLecture 1423813824alkesh.engNo ratings yet
- Chapter 1Document69 pagesChapter 1suritrue9644No ratings yet
- Time Division Multiple AccessDocument17 pagesTime Division Multiple AccesselavinodhNo ratings yet
- 1V. Satellite Access - 2Document49 pages1V. Satellite Access - 2Sai TejaNo ratings yet
- Arif Full GSM NetworkDocument220 pagesArif Full GSM NetworkArif PashaNo ratings yet
- GSM Technology: by Sanjeev GhimireDocument43 pagesGSM Technology: by Sanjeev GhimirenetracNo ratings yet
- EC2043 - Wireless Networks-Two Marks Questions and Answers-LibreDocument19 pagesEC2043 - Wireless Networks-Two Marks Questions and Answers-LibreAbi PandiyanNo ratings yet
- Adaptive Active Constellation Extension Algorithm For Peak-To-Average Ratio Reduction in OfdmDocument11 pagesAdaptive Active Constellation Extension Algorithm For Peak-To-Average Ratio Reduction in Ofdmsurendiran123No ratings yet
- Fundamentals of GSM (2G)Document70 pagesFundamentals of GSM (2G)SyedMohsin123No ratings yet
- Multiple Access Techniques For Wireless CommunicationsDocument92 pagesMultiple Access Techniques For Wireless Communicationsanon_648401865No ratings yet
- Parameter Catalogue PC:GSM: Network Release 8.0Document236 pagesParameter Catalogue PC:GSM: Network Release 8.0Ngo TanNo ratings yet
- Chapter 1 - Introduction To Communication SystemDocument61 pagesChapter 1 - Introduction To Communication SystemIzlaikha AzizNo ratings yet
- SMART Communications, Inc.: SystraDocument50 pagesSMART Communications, Inc.: SystraKausik RaychaudhuriNo ratings yet
- Sample QuestionsDocument108 pagesSample QuestionsAaje Baaje67% (3)
- 4G Technology: Presented by Akshay RathoreDocument26 pages4G Technology: Presented by Akshay RathoreRaj MohanNo ratings yet
- What Is DECTDocument5 pagesWhat Is DECTmaxidicoNo ratings yet
- Cellular Networks - Past, Present and Future PDFDocument14 pagesCellular Networks - Past, Present and Future PDFanunilaNo ratings yet