You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Design SyllabusDocument1 pageDesign SyllabusManoj PepiNo ratings yet
- Ce6306 Strength of Materials Int 3Document2 pagesCe6306 Strength of Materials Int 3ramesh2184No ratings yet
- Design A Radial EngineDocument88 pagesDesign A Radial Engineİsmet SezerNo ratings yet
- Hybrid VehicleDocument10 pagesHybrid Vehicleramesh2184No ratings yet
- Strength of Materials 2 Marks All 5 UnitsDocument28 pagesStrength of Materials 2 Marks All 5 UnitsdhiyaneswaranNo ratings yet
- Bio EnergyDocument31 pagesBio Energyramesh2184No ratings yet
- Four Wheel SteeringDocument47 pagesFour Wheel Steeringramesh2184No ratings yet
- Steering MechanismsDocument28 pagesSteering Mechanismsramesh2184No ratings yet
- Six Leg RobotDocument13 pagesSix Leg Robotramesh2184No ratings yet
- GPC Tuticorin - Mechatronic Smart Vehicle PDFDocument11 pagesGPC Tuticorin - Mechatronic Smart Vehicle PDFramesh2184No ratings yet
- Bio EnergyDocument31 pagesBio Energyramesh2184No ratings yet
- Number Series Short Cut Techniques - Gr8AmbitionZ PDFDocument14 pagesNumber Series Short Cut Techniques - Gr8AmbitionZ PDFramesh2184No ratings yet
- General Knowledge - 1Document3 pagesGeneral Knowledge - 1ramesh2184No ratings yet
- Bio EnergyDocument31 pagesBio Energyramesh2184No ratings yet
- Abrasive Water JetDocument47 pagesAbrasive Water Jetramesh2184No ratings yet
- Solar Hacksaw Project ReportDocument55 pagesSolar Hacksaw Project Reportramesh218482% (11)
- ChemistryDocument2 pagesChemistryramesh2184No ratings yet
- Proj Approval 2015-2016Document2 pagesProj Approval 2015-2016ramesh2184No ratings yet
- Kom Question BankDocument8 pagesKom Question Bankramesh2184No ratings yet
- MachiningDocument58 pagesMachining987_bbb100% (1)
- BHEL, Mechanical Placement Exam Sample Paper1Document2 pagesBHEL, Mechanical Placement Exam Sample Paper1ssethu89No ratings yet
- Mechanical Engg UpscDocument44 pagesMechanical Engg UpscManikandan VijayanNo ratings yet
- InvitationDocument1 pageInvitationrajkanthrmNo ratings yet
- L&TDocument35 pagesL&Tramesh2184No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- A-Series Eccentric Disc Pumps Spec Sheet (39Document3 pagesA-Series Eccentric Disc Pumps Spec Sheet (39rasottoNo ratings yet
- Inspection Checklist For LYCODocument22 pagesInspection Checklist For LYCODavid DoughtyNo ratings yet
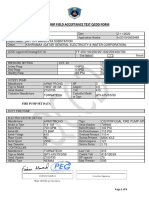
- Part C - QCDD - 3B. Fire Pumps Field Acceptance Test-SignedDocument6 pagesPart C - QCDD - 3B. Fire Pumps Field Acceptance Test-SignedshahnawaznNo ratings yet
- Hilliard Hilco HME 2Document4 pagesHilliard Hilco HME 2Сергей ШевченкоNo ratings yet
- PDFDocument10 pagesPDFALIALIRAZARAZAMALIKNo ratings yet
- Range Rover Sport Brochure 1L4942150000BXXEN01P Tcm281 791801Document82 pagesRange Rover Sport Brochure 1L4942150000BXXEN01P Tcm281 791801Eshan Wellangiriya MusicNo ratings yet
- Reciprocating Compressor (Api 618-4Th) Data Sheet Si Units: Operating Conditions (Each Machine)Document17 pagesReciprocating Compressor (Api 618-4Th) Data Sheet Si Units: Operating Conditions (Each Machine)tutuionutNo ratings yet
- B. InggrisDocument15 pagesB. InggrisSushantyNo ratings yet
- 4 - ATPL Questions - AGK3 Power PlantDocument108 pages4 - ATPL Questions - AGK3 Power PlantTanvir HasanNo ratings yet
- Power Engineering MCQDocument22 pagesPower Engineering MCQĀditya SonāvanéNo ratings yet
- Gear Pumps and Motors "B" Series Group 2,5: Technical CatalogueDocument29 pagesGear Pumps and Motors "B" Series Group 2,5: Technical CatalogueLucyan IonescuNo ratings yet
- Pneumatic Forklift TrucksDocument6 pagesPneumatic Forklift TrucksYakupovmmNo ratings yet
- Volvo Penta Aquamatic Duoprop: World-Class PerformanceDocument2 pagesVolvo Penta Aquamatic Duoprop: World-Class PerformancedeepakgkdNo ratings yet
- STIHL FS 110 Owners Instruction ManualDocument116 pagesSTIHL FS 110 Owners Instruction ManualJasonNo ratings yet
- TQM Project - Petroleum IndustryDocument29 pagesTQM Project - Petroleum IndustryDanish Ali0% (1)
- Crankshaft RepairDocument4 pagesCrankshaft RepairHichamNo ratings yet
- Extend Engine Life with Proper Cooling System MaintenanceDocument25 pagesExtend Engine Life with Proper Cooling System Maintenancedummy account100% (3)
- Caterpillar cw16 PDFDocument2 pagesCaterpillar cw16 PDFBakat SetiyaNo ratings yet
- B&S 479cc Vanguard Engine ManualDocument13 pagesB&S 479cc Vanguard Engine ManualspaytNo ratings yet
- Engine and Structure: The CarDocument8 pagesEngine and Structure: The CarOmar JanjuaNo ratings yet
- Toshiba ElevatorsDocument13 pagesToshiba ElevatorsVajindra WijewickramaNo ratings yet
- Modification of Simple Car To Hybrid CarDocument1 pageModification of Simple Car To Hybrid CarUsama AnsariNo ratings yet
- Water Management 2013 Low ResDocument13 pagesWater Management 2013 Low ResHarshvardhan MishraNo ratings yet
- NIT Rourkela Mechanical Engineering SyllabusDocument9 pagesNIT Rourkela Mechanical Engineering SyllabusVisionateNo ratings yet
- Gender Preferences in STEM EngineeringDocument17 pagesGender Preferences in STEM EngineeringnelcharlesNo ratings yet
- EMISSION SUB SYSTEMS - Spark Advance ControlDocument5 pagesEMISSION SUB SYSTEMS - Spark Advance ControlNguyễn Hoài NamNo ratings yet
- TDS-10S Top Drive Drilling System: Service ManualDocument254 pagesTDS-10S Top Drive Drilling System: Service Manuallsantiagogarcia6344No ratings yet
- Surface EquipmentDocument45 pagesSurface EquipmentvibhutiNo ratings yet
- Development of New 1.8 Liter Engine For Hybrid VehiclesDocument9 pagesDevelopment of New 1.8 Liter Engine For Hybrid VehiclesCostin DanielNo ratings yet
- Manual CarretillaDocument158 pagesManual Carretillaroboperrin89% (9)