You might also like
- Numerical Solutions of Boundary Value Problems for Ordinary Differential EquationsFrom EverandNumerical Solutions of Boundary Value Problems for Ordinary Differential EquationsA.K. AzizNo ratings yet
- Lecture 3 EigenvaluesDocument38 pagesLecture 3 EigenvaluesRamzan8850No ratings yet
- Eigenvalues and Eigen Vector SlidesDocument41 pagesEigenvalues and Eigen Vector SlidesMayur GhatgeNo ratings yet
- ECC - Cyclic Group Cryptography With EllipticDocument21 pagesECC - Cyclic Group Cryptography With EllipticMkumNo ratings yet
- The Calculus of VariationsDocument196 pagesThe Calculus of Variationsrenishkavukatt100% (1)
- The Arithmetic of Z-Numbers - Theory and Applications - Rafik A. Aliev PDFDocument316 pagesThe Arithmetic of Z-Numbers - Theory and Applications - Rafik A. Aliev PDFJose AlvaradoNo ratings yet
- CH 6Document10 pagesCH 6Sravan Kumar JanamaddiNo ratings yet
- Atkinson - Resources in Numerical AnalysisDocument25 pagesAtkinson - Resources in Numerical Analysiscool_gardens20074304No ratings yet
- EGM6341 Sol HW 02Document9 pagesEGM6341 Sol HW 02Redmond R. ShamshiriNo ratings yet
- Eigenvalue Problems PDFDocument30 pagesEigenvalue Problems PDFEva DokicNo ratings yet
- Linear Dynamical Systems - Course ReaderDocument414 pagesLinear Dynamical Systems - Course ReaderTraderCat SolarisNo ratings yet
- Harmonic Analysis and Rational ApproximationDocument307 pagesHarmonic Analysis and Rational ApproximationياسينبوهراوةNo ratings yet
- Mathematical Methods: Linear Algebra / Normed Spaces / Distributions / IntegrationFrom EverandMathematical Methods: Linear Algebra / Normed Spaces / Distributions / IntegrationNo ratings yet
- La Structure de La Géometrie de Descartes (H. J. M. Bos)Document29 pagesLa Structure de La Géometrie de Descartes (H. J. M. Bos)theseus11No ratings yet
- Sums of Two Squares: Pete L. ClarkDocument7 pagesSums of Two Squares: Pete L. Clarkماجد اسماعيل سميرNo ratings yet
- Bayes Practice BookDocument229 pagesBayes Practice BookhsuyabNo ratings yet
- MATH2045: Vector Calculus & Complex Variable TheoryDocument50 pagesMATH2045: Vector Calculus & Complex Variable TheoryAnonymous 8nJXGPKnuW100% (2)
- 03 Dynamical Systems TutorialDocument43 pages03 Dynamical Systems TutorialPrashanth MohanNo ratings yet
- Lecture # 16 PDFDocument24 pagesLecture # 16 PDFMuhammad AdilNo ratings yet
- 111 KDDDocument3 pages111 KDDSunil SinghNo ratings yet
- Sylvester Criterion For Positive DefinitenessDocument4 pagesSylvester Criterion For Positive DefinitenessArlette100% (1)
- Linear AlgebraDocument17 pagesLinear AlgebrajosgauNo ratings yet
- Factorization Methods for Discrete Sequential EstimationFrom EverandFactorization Methods for Discrete Sequential EstimationNo ratings yet
- Lecture09 AfterDocument31 pagesLecture09 AfterLemon SodaNo ratings yet
- Math CatalogDocument24 pagesMath Catalogrrockel0% (1)
- Mathematics Introduction For MSCDocument52 pagesMathematics Introduction For MSC34plt34No ratings yet
- Problems and Solutions To Abstract Algebra Beachy Blair PDFDocument61 pagesProblems and Solutions To Abstract Algebra Beachy Blair PDFAngsNo ratings yet
- Long - History of Monge Problem 11pDocument11 pagesLong - History of Monge Problem 11pDino SolaNo ratings yet
- Number TheoryDocument17 pagesNumber TheoryStephanie Joy PascuaNo ratings yet
- SC - Exploring Analytic Geometry With MathematicaDocument883 pagesSC - Exploring Analytic Geometry With Mathematicamangyan_ako100% (7)
- A Survey of Computational Approaches To Space Layout PlanningDocument18 pagesA Survey of Computational Approaches To Space Layout PlanningNassim YanisNo ratings yet
- تعليم العناصر المنتهية PDFDocument197 pagesتعليم العناصر المنتهية PDFZaid HadiNo ratings yet
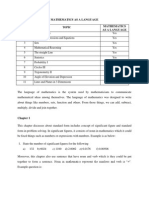
- Mathematics As A LanguageDocument6 pagesMathematics As A LanguageFarah LiyanaNo ratings yet
- 05 Multi-Scale Derivatives - ImplementationsDocument19 pages05 Multi-Scale Derivatives - ImplementationsKarthik UppuluriNo ratings yet
- Putnam Linear AlgebraDocument6 pagesPutnam Linear AlgebrainfinitesimalnexusNo ratings yet
- Functions of Several Variables PDFDocument21 pagesFunctions of Several Variables PDFsuntararaajanNo ratings yet
- Bian - Deep Learning On Smooth ManifoldsDocument6 pagesBian - Deep Learning On Smooth ManifoldsmattNo ratings yet
- Multi Linear Algebra PDFDocument173 pagesMulti Linear Algebra PDFImraansNo ratings yet
- Madhava MC Paper 12Document2 pagesMadhava MC Paper 12Aman-SharmaNo ratings yet
- Book - Complex AnalysisDocument159 pagesBook - Complex AnalysisStefanoNo ratings yet
- CompactnessDocument7 pagesCompactnessvamgaduNo ratings yet
- Dynamical Systems Method for Solving Nonlinear Operator EquationsFrom EverandDynamical Systems Method for Solving Nonlinear Operator EquationsRating: 5 out of 5 stars5/5 (1)
- CW ComplexesDocument6 pagesCW ComplexesBa NguyenNo ratings yet
- Finalv 2Document7 pagesFinalv 2lephucktNo ratings yet
- From Apollonius To Zaremba: Local-Global Phenomena in Thin OrbitsDocument42 pagesFrom Apollonius To Zaremba: Local-Global Phenomena in Thin OrbitsLuis Alberto FuentesNo ratings yet
- Homework 8 SolutionsDocument4 pagesHomework 8 SolutionsMeezan ChandNo ratings yet
- Lectures On Lie Groups and Representations of Locally Compact GroupsDocument140 pagesLectures On Lie Groups and Representations of Locally Compact GroupsDrgsmr ReddyNo ratings yet
- Cayley Graphs of Groups and Their ApplicationsDocument47 pagesCayley Graphs of Groups and Their ApplicationsAnjeliNo ratings yet
- Diffie-Hellman Key ExchangeDocument22 pagesDiffie-Hellman Key ExchangesubburajsNo ratings yet
- The Message of The Quran PDFDocument907 pagesThe Message of The Quran PDFKhaled Ahmed El Sherief100% (3)
- Quiz 7 SolutionDocument1 pageQuiz 7 Solutionhasib_07No ratings yet
- Chapter 6: Angle Relationships and Properties of Geometrical Fi Gures 1Document8 pagesChapter 6: Angle Relationships and Properties of Geometrical Fi Gures 1hasib_07No ratings yet
- Chapter 6 Angle Relationships and Properties of Geometrical Figures 1 PDFDocument56 pagesChapter 6 Angle Relationships and Properties of Geometrical Figures 1 PDFhasib_07No ratings yet
- Robofil X40 CC Us PDFDocument28 pagesRobofil X40 CC Us PDFhasib_07No ratings yet
- Truth Table For Negative Edge Triggered JK Flip Flops CK J K Q 0 0 1 0 1 0 0 1 0 1 1 1 0,1 X XDocument2 pagesTruth Table For Negative Edge Triggered JK Flip Flops CK J K Q 0 0 1 0 1 0 0 1 0 1 1 1 0,1 X Xhasib_07No ratings yet
- Chapter 1: Algebraic Techniques 2 and Indices: 1 A B C D 2 A B C D 3 A B C D 4 A B C D 5 A B C DDocument10 pagesChapter 1: Algebraic Techniques 2 and Indices: 1 A B C D 2 A B C D 3 A B C D 4 A B C D 5 A B C Dsheela baralNo ratings yet
- Effect of Recast Layer Thickness On The Mechanical Characteristics of INCONEL 718 Machined by Spark EDM ProcessDocument7 pagesEffect of Recast Layer Thickness On The Mechanical Characteristics of INCONEL 718 Machined by Spark EDM Processhasib_07No ratings yet
- Safari - Dec 24, 2017 at 2:08 AMDocument1 pageSafari - Dec 24, 2017 at 2:08 AMhasib_07No ratings yet
- Organization Name Type Eligibility Amount Deadline: Fall 2010 Funding Opportunities College of EngineeringDocument7 pagesOrganization Name Type Eligibility Amount Deadline: Fall 2010 Funding Opportunities College of Engineeringhasib_07No ratings yet
- The Macarthur Study Bible and Bible CommentaryDocument15 pagesThe Macarthur Study Bible and Bible Commentaryhasib_07No ratings yet
- Pseudocode Example SlidesDocument16 pagesPseudocode Example Slideshasib_07No ratings yet
- hmk5 f17 Problem 1 SolnDocument1 pagehmk5 f17 Problem 1 Solnhasib_07No ratings yet
- HMK 3 f17Document3 pagesHMK 3 f17hasib_07No ratings yet
- EDM and USM of Hard Materials: K. P. Rajurkar University of Nebraska-Lincoln, USADocument85 pagesEDM and USM of Hard Materials: K. P. Rajurkar University of Nebraska-Lincoln, USAhasib_07No ratings yet
- Structures MoJ1Document7 pagesStructures MoJ1hasib_07No ratings yet
- MECH 991 Sec 001 Seminar: Seminars CoordinatorDocument2 pagesMECH 991 Sec 001 Seminar: Seminars Coordinatorhasib_07No ratings yet
- MECH918 HW3Report Rashidul HasibDocument3 pagesMECH918 HW3Report Rashidul Hasibhasib_07No ratings yet
- Separation of Variables - Two Examples - Laplace's Equation in Polar CoordinatesDocument42 pagesSeparation of Variables - Two Examples - Laplace's Equation in Polar CoordinatesunistarNo ratings yet
- Fall 2017 MD Rashidul Hasib MECH 991 Seminar ReportDocument2 pagesFall 2017 MD Rashidul Hasib MECH 991 Seminar Reporthasib_07No ratings yet
- N Comms 8036Document8 pagesN Comms 8036hasib_07No ratings yet
- Surface Integrity Characteristics in Wire EDM of Inconel 718 A 2013 ProcediaDocument6 pagesSurface Integrity Characteristics in Wire EDM of Inconel 718 A 2013 Procediahasib_07No ratings yet
- Outline of Current Research On Surface Texturing, Grinding and EDMDocument8 pagesOutline of Current Research On Surface Texturing, Grinding and EDMhasib_07No ratings yet
- Elzouka Et Al-2017-Scientific ReportsDocument8 pagesElzouka Et Al-2017-Scientific Reportshasib_07No ratings yet
- Enhancing The Surface Integrity of Ti 6al 4V Alloy Through CR 2014 ProcediaDocument6 pagesEnhancing The Surface Integrity of Ti 6al 4V Alloy Through CR 2014 Procediahasib_07No ratings yet
- Surface Integrity Evolution From Main Cut To Finish Trim Cut I 2014 ProcediaDocument6 pagesSurface Integrity Evolution From Main Cut To Finish Trim Cut I 2014 Procediahasib_07No ratings yet
- In Frame FabricationDocument1 pageIn Frame Fabricationhasib_07No ratings yet
- MJB4 Mask Aligner Operating ProcedureDocument7 pagesMJB4 Mask Aligner Operating Procedurehasib_07No ratings yet
- Wire Electro-Discharge Machining of Titanium AlloyDocument6 pagesWire Electro-Discharge Machining of Titanium Alloyhasib_07No ratings yet
- Machining Induced Surface Integrity in Titanium and Nickel Alloys A Review PDFDocument31 pagesMachining Induced Surface Integrity in Titanium and Nickel Alloys A Review PDFhasib_07No ratings yet
- Advanced Data Research PaperDocument6 pagesAdvanced Data Research Papersaurabh20apr100% (1)
- DA3220: Data Structures: Unit 1 (8L)Document1 pageDA3220: Data Structures: Unit 1 (8L)Narendra KumarNo ratings yet
- DS Lab Manual PDFDocument53 pagesDS Lab Manual PDFDeepthi. rajshekarNo ratings yet
- Unit 8 SortingDocument37 pagesUnit 8 SortingReeya RamudamuNo ratings yet
- Shooting Method 6 PDFDocument11 pagesShooting Method 6 PDFمرتضى عباسNo ratings yet
- 18cs32 - Data Structure and Its ApplicationDocument22 pages18cs32 - Data Structure and Its Applicationvenkatesh prasadNo ratings yet
- Exercise 4Document5 pagesExercise 4Amadou BANo ratings yet
- Decision TreesDocument19 pagesDecision TreesMuhammad Zain AbbasNo ratings yet
- Algorithm Design: Spring 2016 Problem Set 3Document4 pagesAlgorithm Design: Spring 2016 Problem Set 3katayounNo ratings yet
- Program For Bankers Algorithm For Deadlock Avoidance in CDocument6 pagesProgram For Bankers Algorithm For Deadlock Avoidance in CKarunakar EllaNo ratings yet
- Scikit Learn Cheat Sheet: by ViaDocument1 pageScikit Learn Cheat Sheet: by ViaRajachandra VoodigaNo ratings yet
- Homework 3 Association Rule MiningDocument3 pagesHomework 3 Association Rule Miningم. سهير عبد داؤد عسىNo ratings yet
- Stacks and QueuesDocument41 pagesStacks and QueuesKumar Vidya100% (1)
- MTZDocument15 pagesMTZAtibhi LehakraNo ratings yet
- Karush-Kuhn-Tucker ConditionsDocument5 pagesKarush-Kuhn-Tucker ConditionsAndrea SpencerNo ratings yet
- Data Structures TutorialDocument4 pagesData Structures Tutorialtopoonamjadhav3680No ratings yet
- End 332e Hw2Document3 pagesEnd 332e Hw2Dafne Vanessa CalderoneNo ratings yet
- Perceptron - WikipediaDocument9 pagesPerceptron - WikipediaNoles PandeNo ratings yet
- Chendu College of Engineering & TechnologyDocument5 pagesChendu College of Engineering & Technologyanish.t.pNo ratings yet
- 17 Dynamic Programming Matrix Chain Multiplication No PauseDocument32 pages17 Dynamic Programming Matrix Chain Multiplication No PauseAbdallahi SidiNo ratings yet
- Daa MiniprojectDocument21 pagesDaa MiniprojectVivek SinghNo ratings yet
- HW 8Document2 pagesHW 8kalaputraNo ratings yet
- Greedy Practice ProblemsDocument3 pagesGreedy Practice Problems007wasrNo ratings yet
- CC 104 - SG - 6Document20 pagesCC 104 - SG - 6karina abyysNo ratings yet
- Linear Equations-Direct MethodsDocument50 pagesLinear Equations-Direct Methodsezilnah7No ratings yet
- 21BCA1946 Worksheet1.5Document4 pages21BCA1946 Worksheet1.5Divya Prakash SinghNo ratings yet
- Lab 2: Problem Solving Using Algorithm: PseudocodeDocument4 pagesLab 2: Problem Solving Using Algorithm: PseudocodeAinur NasuhaNo ratings yet
- Unit-2 ArraysDocument22 pagesUnit-2 Arraysmanvenderapathak165No ratings yet
- CS8451 DESIGN AND ANALYSIS OF ALGORITHMS QUESTION BANK - Watermark PDFDocument47 pagesCS8451 DESIGN AND ANALYSIS OF ALGORITHMS QUESTION BANK - Watermark PDFneelakandan50% (2)
- Hashing: CSE225: Data Structures and AlgorithmsDocument14 pagesHashing: CSE225: Data Structures and AlgorithmsMeherin Afroz Mime 1912965642No ratings yet