You might also like
- Hrs. Studies Grade On Exam Xi Yi Xi - Xbar Yi - Ybar (Xi - Xbar) (Yi - Ybar)Document6 pagesHrs. Studies Grade On Exam Xi Yi Xi - Xbar Yi - Ybar (Xi - Xbar) (Yi - Ybar)ElizabethNo ratings yet
- 21BCB7133 - Lab 5 AssignmentDocument4 pages21BCB7133 - Lab 5 Assignmentsoma tejaswi164No ratings yet
- Uts PetrogenesisDocument8 pagesUts PetrogenesisSayyid AbdullahNo ratings yet
- Blueguns CatalogDocument8 pagesBlueguns Catalogbo cephusNo ratings yet
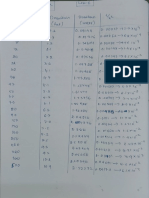
- Adobe Scan 13 Feb 2022Document13 pagesAdobe Scan 13 Feb 2022SayoojyalohidNo ratings yet
- Demand Forecasting Practice ProblemDocument2 pagesDemand Forecasting Practice ProblemmanosethNo ratings yet
- Appendiks: A. Data Pengamatan A.1 Variabel 1Document8 pagesAppendiks: A. Data Pengamatan A.1 Variabel 1hari yanti23No ratings yet
- Repetitivo - Impenhorabilidade de Salário Por Dívida Não AlimentarDocument2 pagesRepetitivo - Impenhorabilidade de Salário Por Dívida Não AlimentarafonsocastelanoNo ratings yet
- Pelatihan KorelasiDocument2 pagesPelatihan KorelasiAndhika Putra Hady'sNo ratings yet
- APCO-IASC 1P01 - Winter 2019Document9 pagesAPCO-IASC 1P01 - Winter 2019KashémNo ratings yet
- Ton/m : Perhitungan BlokDocument3 pagesTon/m : Perhitungan BlokSiti Zahiratul HaniyahNo ratings yet
- Fce#1 WK-46Document166 pagesFce#1 WK-46AsepYudhistiraNo ratings yet
- ქუთაისი საწყობიDocument2 pagesქუთაისი საწყობისალომე ქადარიაNo ratings yet
- Basic Statistical AnalysesDocument7 pagesBasic Statistical AnalysesHannah LegaspiNo ratings yet
- Duplex Oligonucleotide: Technical Data Sheet (TDS)Document2 pagesDuplex Oligonucleotide: Technical Data Sheet (TDS)An NhiennNo ratings yet
- SEL-787 Pickup and Slope Test Calculations For AG2011-09Document17 pagesSEL-787 Pickup and Slope Test Calculations For AG2011-09jigyeshNo ratings yet
- Aranaydo Week 2Document12 pagesAranaydo Week 2Carl Harold AranaydoNo ratings yet
- PNS 60D THRDocument4 pagesPNS 60D THRAnisa LiAngelNo ratings yet
- Lab6Document4 pagesLab6Ja Sala369No ratings yet
- Race1: SL Name DR Timefor M TF (Dist) T V JV D V C V Track D W W 2Nd 3Rd Tot W 2Nd 3Rd Tot NTRDocument9 pagesRace1: SL Name DR Timefor M TF (Dist) T V JV D V C V Track D W W 2Nd 3Rd Tot W 2Nd 3Rd Tot NTRvvNo ratings yet
- THR PNS 2024 BanyuasinDocument127 pagesTHR PNS 2024 Banyuasinfaizfachrudin06No ratings yet
- Tabel Ukuran Dan Berat Pipa Schedule Stainless SteelDocument11 pagesTabel Ukuran Dan Berat Pipa Schedule Stainless SteelExschel Putra SinexNo ratings yet
- Race1: TTSC Turf Track Short Course TTLC Turf Track Long Course PT Poly TrackDocument20 pagesRace1: TTSC Turf Track Short Course TTLC Turf Track Long Course PT Poly TrackvvNo ratings yet
- Data Awal 1Document2 pagesData Awal 1Ridwan AlipurrochmanNo ratings yet
- UntitledDocument1 pageUntitledjhon jaider zapata arenasNo ratings yet
- Dual Slope TestDocument13 pagesDual Slope TestchetanNo ratings yet
- Penfor 13Document55 pagesPenfor 13RaraInsyiraNo ratings yet
- ELECTRONICA 1 Labo 4 Alba Uriona MijaelDocument10 pagesELECTRONICA 1 Labo 4 Alba Uriona Mijaelvladimir quispe condoriNo ratings yet
- SPC L.O.I %Document2 pagesSPC L.O.I %Dhananjay PatilNo ratings yet
- Name and FormulaDocument3 pagesName and FormulaAmanda Gomes de Carvalho BiribaNo ratings yet
- No Name Test Item 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8 9 10 Upper Group Lower Group TotalDocument15 pagesNo Name Test Item 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8 9 10 Upper Group Lower Group TotalMuhammad AkbarNo ratings yet
- Din 2616 PDFDocument2 pagesDin 2616 PDFTahresNo ratings yet
- Din 2616 PDFDocument2 pagesDin 2616 PDFmiguelfpintoNo ratings yet
- Fittings - DIN 2616: VL Code 731Document2 pagesFittings - DIN 2616: VL Code 731RatheeshNo ratings yet
- 1 - Reduciri - Din 2616Document2 pages1 - Reduciri - Din 2616Slobodan Boban StanojkovicNo ratings yet
- Din 2616 PDFDocument2 pagesDin 2616 PDFALEKSANDARNo ratings yet
- Circuit RCDocument7 pagesCircuit RCElouarik AbdeslamNo ratings yet
- 415546646 სამედიცინო ქიმია PDFDocument259 pages415546646 სამედიცინო ქიმია PDFtamaraNo ratings yet
- სამედიცინო ქიმია PDFDocument259 pagesსამედიცინო ქიმია PDFDavitaaa .GNo ratings yet
- Cptu Report: Toli Toli September 2019Document61 pagesCptu Report: Toli Toli September 2019RivaiNo ratings yet
- Bays 35 - 33 (Aft) Twin (GM 3.27 M, R Unrestr, V 21.6kn)Document1 pageBays 35 - 33 (Aft) Twin (GM 3.27 M, R Unrestr, V 21.6kn)Jeanclaude NtoumbaNo ratings yet
- Gear Cube Solution JaapDocument4 pagesGear Cube Solution JaapBaBaK DNo ratings yet
- TGS Statistik 5Document6 pagesTGS Statistik 5Muttaqin Kurniawan UIN MataramNo ratings yet
- Quality Kitchens Meat Loaf Mix: Data Analytics For Leaders - EMBA 2020 Februrary 2021Document4 pagesQuality Kitchens Meat Loaf Mix: Data Analytics For Leaders - EMBA 2020 Februrary 2021JaouadiNo ratings yet
- MUETREODocument44 pagesMUETREOnoerNo ratings yet
- JhujnnDocument5 pagesJhujnnFanni MolnárNo ratings yet
- D03Document37 pagesD03Abdul basithNo ratings yet
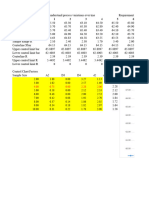
- SPC Example 1Document5 pagesSPC Example 1christliu1024No ratings yet
- Monitoring Meteran Listrik Dan Air MPGG DEMAK 2022Document8 pagesMonitoring Meteran Listrik Dan Air MPGG DEMAK 2022Andika Dwi CahyaNo ratings yet
- Tugas Anstruk Hari RayaDocument26 pagesTugas Anstruk Hari RayasyukranNo ratings yet
- Analisis Del Total de RaicesDocument2 pagesAnalisis Del Total de RaicesAnyi Paola Martinez RicardoNo ratings yet
- Diskusi Sesi 5 AriefWijaya 041324513Document2 pagesDiskusi Sesi 5 AriefWijaya 041324513Jupi TerzNo ratings yet
- Race1: SL Name DR Timeform TF (Dist) TV JV D V CV Trac K DW W 2Nd 3R D To T W 2Nd 3R D Tot NTRDocument8 pagesRace1: SL Name DR Timeform TF (Dist) TV JV D V CV Trac K DW W 2Nd 3R D To T W 2Nd 3R D Tot NTRvvNo ratings yet
- Hino NacionalDocument47 pagesHino NacionalJean YabarrenaNo ratings yet
- Limbaga - Assignment (Space Group C2c - CaMgSi2O6)Document6 pagesLimbaga - Assignment (Space Group C2c - CaMgSi2O6)EDISON LIMBAGANo ratings yet
- Limbaga - Assignment (Space Group C2c - CaMgSi2O6)Document4 pagesLimbaga - Assignment (Space Group C2c - CaMgSi2O6)EDISON LIMBAGANo ratings yet
- Perhitungan Ika Provinsi Kabupaten-KotaDocument13 pagesPerhitungan Ika Provinsi Kabupaten-Kotapuri saptaNo ratings yet
- Respuesta Desde El Servidor Bytes Retardo Hora de MuestraDocument18 pagesRespuesta Desde El Servidor Bytes Retardo Hora de MuestraDiana Raquel Torres CastilloNo ratings yet
- Tugas Mandiri Forward Modelling - Ainul Sya'Ban (H061201048)Document14 pagesTugas Mandiri Forward Modelling - Ainul Sya'Ban (H061201048)Ainul Sya'banNo ratings yet
- Multi-Sulfur and Sulfur and Oxygen Five- and Six-Membered Heterocycles, Part 2From EverandMulti-Sulfur and Sulfur and Oxygen Five- and Six-Membered Heterocycles, Part 2David S. BreslowNo ratings yet
- Faculty Recruitment Proposed Distribution Sept 2017Document1 pageFaculty Recruitment Proposed Distribution Sept 2017Arindam MitraNo ratings yet
- Voltage Stability PPT by C.W.taylorDocument56 pagesVoltage Stability PPT by C.W.taylorArindam Mitra100% (2)
- 1989 - A Novel Approach To Dynamic Load ModellingDocument7 pages1989 - A Novel Approach To Dynamic Load ModellingArindam MitraNo ratings yet
- Ward Equivalent PDFDocument24 pagesWard Equivalent PDFArindam MitraNo ratings yet
- McKirk 30 Day ChallengeDocument73 pagesMcKirk 30 Day ChallengeLiloo OkazakiNo ratings yet
- 80010304Document3 pages80010304Beeboy EkkachonNo ratings yet
- Framework For Data-Driven Learning PDFDocument22 pagesFramework For Data-Driven Learning PDFPadmaja SurenNo ratings yet
- PPSC MCQSDocument230 pagesPPSC MCQSfameansari63% (8)
- DDAL07-07 - Rotting Roots v1.0Document23 pagesDDAL07-07 - Rotting Roots v1.0Eduardo LibórioNo ratings yet
- Ch5.0 Operation of BoilersDocument80 pagesCh5.0 Operation of BoilersRey100% (1)
- Biddle - VRVDocument31 pagesBiddle - VRVutzu_yooNo ratings yet
- The Happy Prince and Other Tales - Oscar Wilde PDFDocument41 pagesThe Happy Prince and Other Tales - Oscar Wilde PDFFiamma Del SartoNo ratings yet
- (PPL) Flight Performance and PlanningDocument4 pages(PPL) Flight Performance and Planningmelvin mateoNo ratings yet
- En Catalogue Duralight 2011Document52 pagesEn Catalogue Duralight 2011MishealNo ratings yet
- ArfimaDocument48 pagesArfimaStiven RodriguezNo ratings yet
- Water Cycle Webquest 2Document6 pagesWater Cycle Webquest 2api-264756260No ratings yet
- Damage Assessment After Accidental Events PDFDocument72 pagesDamage Assessment After Accidental Events PDFTalwinder Singh Manhas50% (2)
- Project ReportDocument37 pagesProject ReportXiaoman TuNo ratings yet
- Climate Change and Agriculture in The United States: Effects and AdaptationDocument98 pagesClimate Change and Agriculture in The United States: Effects and AdaptationClimateCentralNo ratings yet
- KD 2019 Kings Dominion MapDocument2 pagesKD 2019 Kings Dominion MapMahendra BandsodeNo ratings yet
- Virtual Tour Guiding Script Antique, Philippines in 5 MinsDocument2 pagesVirtual Tour Guiding Script Antique, Philippines in 5 Minscheylove12373% (41)
- Bourdon Tube Pressure Gauge Stainless Steel Case Type 212.53 - Dry Case Type 213.53 - Liquid-Filled CaseDocument3 pagesBourdon Tube Pressure Gauge Stainless Steel Case Type 212.53 - Dry Case Type 213.53 - Liquid-Filled CasecarlosNo ratings yet
- Atomix 00582W ManualDocument4 pagesAtomix 00582W ManualJbl IncNo ratings yet
- Topic 1 - Introduction To Population, Resources, and The EnvironmentDocument55 pagesTopic 1 - Introduction To Population, Resources, and The EnvironmentAloke PaulNo ratings yet
- HDP-Victaulic Estilo 995Document4 pagesHDP-Victaulic Estilo 995hugorubenzNo ratings yet
- G11pablo FirstDocument11 pagesG11pablo Firstapi-341659664No ratings yet
- Class Viii SST and ScienceDocument5 pagesClass Viii SST and ScienceSarvesh Kumar SinghNo ratings yet
- UD 6-81-7 (E) A Guide To Cold Weather Operations, Booklet 7, Cold Weather Equipment (1988)Document32 pagesUD 6-81-7 (E) A Guide To Cold Weather Operations, Booklet 7, Cold Weather Equipment (1988)Sven Weißenberger100% (1)
- HSE Aspects of Burj Dubai ReportDocument22 pagesHSE Aspects of Burj Dubai ReportsansamDudeNo ratings yet
- PPT1 - Qualitative Vs Quantitative DataDocument13 pagesPPT1 - Qualitative Vs Quantitative DataBrendan Lewis DelgadoNo ratings yet
- Gestra Catalog 2005Document190 pagesGestra Catalog 2005marioLhrNo ratings yet
- Satellite PDFDocument15 pagesSatellite PDFSanjid ElahiNo ratings yet
- The Baby in The Backpack - RoselDocument15 pagesThe Baby in The Backpack - RoselJohn Gemil JavierNo ratings yet
- Dictionnaire English NepaliDocument146 pagesDictionnaire English Nepaliनेपालको लागि येशुNo ratings yet