You might also like
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- The Three Phase Induction Motor As GeneratorDocument8 pagesThe Three Phase Induction Motor As GeneratorJhon HernandezNo ratings yet
- Back EMF Detection Method For Sensorless Brushless DCDocument91 pagesBack EMF Detection Method For Sensorless Brushless DCnicoletabytaxNo ratings yet
- A.C. Motor and Its TypesDocument10 pagesA.C. Motor and Its TypessasidaranNo ratings yet
- LJ Create: Analog and Digital Motor ControlDocument7 pagesLJ Create: Analog and Digital Motor ControlMahmud Hasan SumonNo ratings yet
- Back EMF in A Motor NotesDocument3 pagesBack EMF in A Motor NotesNisitha Tharushan DarmarathnaNo ratings yet
- 50 Watt Small Homemade InverterDocument25 pages50 Watt Small Homemade InverterMarlon CarinoNo ratings yet
- Design and Development of Three Phase Permanent Magnet BrushlessDocument11 pagesDesign and Development of Three Phase Permanent Magnet BrushlessteomondoNo ratings yet
- BACK EmfDocument12 pagesBACK Emfarshad_rcciitNo ratings yet
- Making A Flynn Motor - Circuit Diagram Attached: Parallel Path Magnetic TheoryDocument5 pagesMaking A Flynn Motor - Circuit Diagram Attached: Parallel Path Magnetic Theorydewidewi76No ratings yet
- Overunity LEDDocument8 pagesOverunity LEDboo10626850No ratings yet
- Basic Construction and Working of A DC GeneratorDocument12 pagesBasic Construction and Working of A DC GeneratorMaheedhar ReddyNo ratings yet
- Brushless DC MotorDocument6 pagesBrushless DC Motorpsksiva13No ratings yet
- Make The Joule Thief Circuit For Power A CFLDocument7 pagesMake The Joule Thief Circuit For Power A CFLRifi HadiNo ratings yet
- Chapter 6 Induction Motor ConstructionDocument42 pagesChapter 6 Induction Motor Constructionupendra35No ratings yet
- AlternatorDocument8 pagesAlternatorBoreda RahulNo ratings yet
- Motor AC Generator (Alternator) TransformerDocument17 pagesMotor AC Generator (Alternator) Transformeranon_644275375No ratings yet
- Parallel Magnetic Path TechnologyDocument16 pagesParallel Magnetic Path TechnologyMohammed FaizanNo ratings yet
- Stepper MotorDocument59 pagesStepper Motorya zool / يا زولNo ratings yet
- RV Energy Saving Applications and R and DDocument83 pagesRV Energy Saving Applications and R and Dmaramdi100% (3)
- Permanent MagnetDocument31 pagesPermanent MagnetKendra KaiserNo ratings yet
- El-CID Testing PDFDocument16 pagesEl-CID Testing PDFA.YOGAGURUNo ratings yet
- BLDC ControlDocument16 pagesBLDC ControlSaurabh DashNo ratings yet
- No. 390,721, Patented 00 T. 9, 1888.: Best Avalable Cop N, TeslaDocument4 pagesNo. 390,721, Patented 00 T. 9, 1888.: Best Avalable Cop N, TeslaAtharva Deshpande100% (1)
- Application of Brushless DC Motor in MilitaryDocument10 pagesApplication of Brushless DC Motor in Militarymighty_heart100% (1)
- Multistage Coil Gun Project ProposalDocument8 pagesMultistage Coil Gun Project ProposalAbdullah ArifNo ratings yet
- Modelling and Simuation of BLDC Motor in MATLAB GUIDocument5 pagesModelling and Simuation of BLDC Motor in MATLAB GUIvishiwizardNo ratings yet
- Brushless Alternators: © 2000 Graig PearenDocument3 pagesBrushless Alternators: © 2000 Graig PearenAboalfotoh Mahmoud100% (2)
- Permanent Magnet Brushless DC MotorDocument7 pagesPermanent Magnet Brushless DC MotoratultiwarihinduNo ratings yet
- Permanent-Magnet Starter Motor (Automobile)Document3 pagesPermanent-Magnet Starter Motor (Automobile)prasad100% (1)
- A New Unity Power Factor Quasi-Resonant Induction Heater PDFDocument225 pagesA New Unity Power Factor Quasi-Resonant Induction Heater PDFŽarko Dačević100% (1)
- BLDCDocument4 pagesBLDCmechtex Pvt LtdNo ratings yet
- 0-Pulse Width Modulation For Power ConvertersDocument19 pages0-Pulse Width Modulation For Power ConvertersSpasoje MiricNo ratings yet
- Hector Posts Volume6Document153 pagesHector Posts Volume6Vincent J. Cataldi100% (1)
- Open Loop Control of Permanent Magnet Synchronous Motor Using SVMDocument5 pagesOpen Loop Control of Permanent Magnet Synchronous Motor Using SVMVipin_am100% (1)
- Reluctance MotorDocument14 pagesReluctance Motortheodorakis017781No ratings yet
- Hector Posts Volume5Document140 pagesHector Posts Volume5Vincent J. CataldiNo ratings yet
- BLDC Motor DriverDocument6 pagesBLDC Motor DriverjpmacabascoNo ratings yet
- 1998 AEMT Repair of Induction Motors Best Practices To Maintain Energy EfficiencyDocument50 pages1998 AEMT Repair of Induction Motors Best Practices To Maintain Energy EfficiencySing Yew LamNo ratings yet
- Electric Machinery FundamentalsDocument6 pagesElectric Machinery FundamentalsKashyap Dubey0% (1)
- Homopolar Motor With Liquid Metal BrushesDocument7 pagesHomopolar Motor With Liquid Metal Brushestheodorakis017781No ratings yet
- Novel Dual-Excitation Permanent Magnet Vernier Machine: Akio Toba Thomas A. LipoDocument6 pagesNovel Dual-Excitation Permanent Magnet Vernier Machine: Akio Toba Thomas A. LipoNenad Kostadinovic50% (2)
- Reluctance MotorDocument16 pagesReluctance Motorapi-382713280% (5)
- Power Electronics NotesDocument137 pagesPower Electronics NotesShaheer TariqNo ratings yet
- Alternator TheoryDocument36 pagesAlternator TheoryCandiano PopescuNo ratings yet
- DK Matai Tesla MotorDocument6 pagesDK Matai Tesla MotortweetalkNo ratings yet
- Magnetic AmplifierDocument2 pagesMagnetic Amplifierrintarejoy100% (1)
- Speed Control Brushless DCDocument27 pagesSpeed Control Brushless DCstanley FNo ratings yet
- FM Radio ReceiverDocument5 pagesFM Radio ReceiverRalph DimaandalNo ratings yet
- Voltage Controlled OscillatorDocument7 pagesVoltage Controlled Oscillatorjonesy5000No ratings yet
- Lecture14 - Stator Phase Circuits & Coil Design, Part 1Document21 pagesLecture14 - Stator Phase Circuits & Coil Design, Part 1ramaswamykama786No ratings yet
- Permanent Magnet Synchronous GeneratorDocument5 pagesPermanent Magnet Synchronous GeneratorSanela BeganovicNo ratings yet
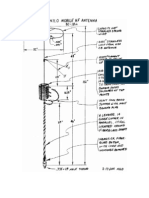
- Antena Movil HFDocument10 pagesAntena Movil HF10sd156100% (1)
- Advanced RV Research and DevelopmentDocument125 pagesAdvanced RV Research and DevelopmentSologee MusaNo ratings yet
- Lab 3 Squirrel Cage Induction Machine-1Document8 pagesLab 3 Squirrel Cage Induction Machine-1max100% (1)
- Research and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968From EverandResearch and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968No ratings yet
- Analysis of The Impact of Magnetic Materials On Cogging Torque in Brushless DC MotorDocument10 pagesAnalysis of The Impact of Magnetic Materials On Cogging Torque in Brushless DC MotorkkarthiksNo ratings yet
- Development and Evaluation of The Bootstrap Resampling Technique Based Statistical Prediction Model For Covid 19 Real Time Data A Data Driven ApproachDocument14 pagesDevelopment and Evaluation of The Bootstrap Resampling Technique Based Statistical Prediction Model For Covid 19 Real Time Data A Data Driven ApproachkkarthiksNo ratings yet
- Mitigation of Supply Current Harmonics in Fuzzy-Logic Based 3-Phase Induction MotorDocument9 pagesMitigation of Supply Current Harmonics in Fuzzy-Logic Based 3-Phase Induction MotorkkarthiksNo ratings yet
- An Improved Power Quality Disturbance Detection Using Deep Learning ApproachDocument12 pagesAn Improved Power Quality Disturbance Detection Using Deep Learning ApproachkkarthiksNo ratings yet
- Impact of Stator Slot Shape On Cogging Torque of PMBLDC MotorDocument7 pagesImpact of Stator Slot Shape On Cogging Torque of PMBLDC MotorkkarthiksNo ratings yet
- Implementation of A Heart Disease Risk Prediction Model Using Machine LearningDocument14 pagesImplementation of A Heart Disease Risk Prediction Model Using Machine LearningkkarthiksNo ratings yet
- Text Detection and Recognition in Raw Image Dataset of Seven Segment Digital Energy Meter DisplayDocument11 pagesText Detection and Recognition in Raw Image Dataset of Seven Segment Digital Energy Meter DisplaykkarthiksNo ratings yet
- Alireza Tashakori Abkenar Thesis PDFDocument199 pagesAlireza Tashakori Abkenar Thesis PDFYesha ShahNo ratings yet
- The Basic Reproduction Number and Herd Immunity For COVID-19 in IndiaDocument5 pagesThe Basic Reproduction Number and Herd Immunity For COVID-19 in IndiakkarthiksNo ratings yet
- Steps Involved in Text Recognition and Recent Research in OCR A StudyDocument6 pagesSteps Involved in Text Recognition and Recent Research in OCR A StudykkarthiksNo ratings yet
- Survey of Image Processing Based Applications in AmrDocument8 pagesSurvey of Image Processing Based Applications in AmrkkarthiksNo ratings yet
- Sensorless Control For High-Speed Brushless DC Motor Based On The Line-To-Line Back-EMFDocument14 pagesSensorless Control For High-Speed Brushless DC Motor Based On The Line-To-Line Back-EMFkkarthiksNo ratings yet
- Brushless DC Motor Fundamentals PDFDocument19 pagesBrushless DC Motor Fundamentals PDFArun NarayanNo ratings yet
- Consumer Service Number Recognition Using Template Matching Algorithm For Improvements in Ocr Based Energy Consumption BillingDocument7 pagesConsumer Service Number Recognition Using Template Matching Algorithm For Improvements in Ocr Based Energy Consumption BillingkkarthiksNo ratings yet
- Design of High Power Permanent Magnet MotorWith Segment Rectangular Copper Wire and Closed Slot Opening On Electric VehiclesDocument4 pagesDesign of High Power Permanent Magnet MotorWith Segment Rectangular Copper Wire and Closed Slot Opening On Electric VehicleskkarthiksNo ratings yet
- Fuzzy Based Approach For Direct Torque Control of Three Phase Induction MotorDocument7 pagesFuzzy Based Approach For Direct Torque Control of Three Phase Induction MotorkkarthiksNo ratings yet
- Estimation of The Reproduction Number and Early Prediction of The COVID-19 Outbreak in India Using A Statistical Computing ApproachDocument5 pagesEstimation of The Reproduction Number and Early Prediction of The COVID-19 Outbreak in India Using A Statistical Computing ApproachkkarthiksNo ratings yet
- Analysis For Fault Detection of Vector-Controlled Permanent Magnet Synchronous Motor With Permanent Magnet DefectDocument4 pagesAnalysis For Fault Detection of Vector-Controlled Permanent Magnet Synchronous Motor With Permanent Magnet DefectkkarthiksNo ratings yet
- Tolar Timeline (History) PDFDocument12 pagesTolar Timeline (History) PDFEeswar ReddyNo ratings yet
- A New 9-Phase Permanent Magnet Synchronous Motor With Consequent Pole Rotor For High Power Traction ApplicationsDocument6 pagesA New 9-Phase Permanent Magnet Synchronous Motor With Consequent Pole Rotor For High Power Traction ApplicationskkarthiksNo ratings yet
- FE Analysis and Computer-Aided Design of A Sandwiched Axial-Flux Permanent Magnet Brushless DC MotorDocument3 pagesFE Analysis and Computer-Aided Design of A Sandwiched Axial-Flux Permanent Magnet Brushless DC MotorkkarthiksNo ratings yet
- Design of High Power Permanent Magnet MotorWith Segment Rectangular Copper Wire and Closed Slot Opening On Electric VehiclesDocument4 pagesDesign of High Power Permanent Magnet MotorWith Segment Rectangular Copper Wire and Closed Slot Opening On Electric VehicleskkarthiksNo ratings yet
- FE Analysis and Computer-Aided Design of A Sandwiched Axial-Flux Permanent Magnet Brushless DC MotorDocument3 pagesFE Analysis and Computer-Aided Design of A Sandwiched Axial-Flux Permanent Magnet Brushless DC MotorkkarthiksNo ratings yet
- Review On Solar PV Based Drives For Water Pumping ApplicationDocument3 pagesReview On Solar PV Based Drives For Water Pumping ApplicationkkarthiksNo ratings yet
- A Novel Dual Three-Phase Permanent Magnet Synchronous Motor With Asymmetric Stator WindingDocument4 pagesA Novel Dual Three-Phase Permanent Magnet Synchronous Motor With Asymmetric Stator WindingmohammadNo ratings yet
- Survey of Image Forgery Detection Methods-A Passive ApproachDocument7 pagesSurvey of Image Forgery Detection Methods-A Passive ApproachkkarthiksNo ratings yet
- 1 Phase Semi ConverterDocument17 pages1 Phase Semi ConverterkkarthiksNo ratings yet
- Data Science With R WorkflowDocument3 pagesData Science With R WorkflowrheezqNo ratings yet
- Survey of Image Processing Based Applications in AmrDocument8 pagesSurvey of Image Processing Based Applications in AmrkkarthiksNo ratings yet
- Discontinued Sources From ScopusDocument42 pagesDiscontinued Sources From ScopuskkarthiksNo ratings yet
- Machines II ManualsDocument37 pagesMachines II ManualsAtharv ParanjpeNo ratings yet
- IAM Unit 4 MCQDocument4 pagesIAM Unit 4 MCQVishal SawantNo ratings yet
- Chapter-5 Synchronous MacineDocument30 pagesChapter-5 Synchronous MacineAman BazeNo ratings yet
- EE311 Electric Drives Control For Automation PDFDocument2 pagesEE311 Electric Drives Control For Automation PDFAmalNo ratings yet
- Simulation Practical FileDocument22 pagesSimulation Practical FileRahul SaraswatNo ratings yet
- Why Polyphase Induction Never Attains Synchronous SpeedDocument2 pagesWhy Polyphase Induction Never Attains Synchronous SpeedKaruppu SamyNo ratings yet
- Vol 1 ING - Vers 2018 PDFDocument210 pagesVol 1 ING - Vers 2018 PDFAlessandro Ribeiro Soares De QueirozNo ratings yet
- PG HandbookDocument371 pagesPG HandbookEllastrous Gogo NathanNo ratings yet
- HP Gearless Ball Mill Drive in Cement-Why Not! PDFDocument15 pagesHP Gearless Ball Mill Drive in Cement-Why Not! PDFRajuNo ratings yet
- Electrical Engineering Third Year SyllabusDocument32 pagesElectrical Engineering Third Year Syllabus123vidyaNo ratings yet
- Operating Characteristics of Synchronous MachineDocument9 pagesOperating Characteristics of Synchronous Machinekitchu007No ratings yet
- Lab Report 1 DC Generators PDFDocument3 pagesLab Report 1 DC Generators PDFjeremias marticio0% (1)
- Brushless DC MotorDocument13 pagesBrushless DC MotorYova PrameswariNo ratings yet
- 05 4 ServomotorsDocument118 pages05 4 ServomotorsJosé Carlos Macavilca RománNo ratings yet
- ست خطوات العاكس لقيادة المحرك التعريفي ثلاث مراحلDocument113 pagesست خطوات العاكس لقيادة المحرك التعريفي ثلاث مراحلMOUHSSINE BEN HAMMOUNo ratings yet
- 02-1 Synchronous MachinesDocument48 pages02-1 Synchronous MachinesvenikiranNo ratings yet
- Electrotechnics N4 November 2022 Memorandum PDFDocument8 pagesElectrotechnics N4 November 2022 Memorandum PDFPetro Susan BarnardNo ratings yet
- Induction Generator and Synchronous Induction Motor: Presented By: Namani Srilahari Pavithran SelvamDocument16 pagesInduction Generator and Synchronous Induction Motor: Presented By: Namani Srilahari Pavithran SelvamRaghulNo ratings yet
- PhdThesis Weizhong FeiDocument284 pagesPhdThesis Weizhong FeiHuynh Thanh AnhNo ratings yet
- Electrical MotorsDocument53 pagesElectrical MotorsMahesh100% (10)
- Piohr, We Compute The Derivative Piobr Piobe. Thus Pinbe Piobc PP-'iodqDocument34 pagesPiohr, We Compute The Derivative Piobr Piobe. Thus Pinbe Piobc PP-'iodqpragatinareshNo ratings yet
- Stepper MotorsDocument26 pagesStepper MotorsRam Kumar GogadaNo ratings yet
- 108102121Document302 pages108102121Vaibhav PrajapatiNo ratings yet
- Powtran PI9000 Series Inverter Introduction: Dalian Powtran Technology Co., LTDDocument8 pagesPowtran PI9000 Series Inverter Introduction: Dalian Powtran Technology Co., LTDMohammed LabiedNo ratings yet
- Frozen Permeability BenchmarkFinite Element Method MagneticsDocument6 pagesFrozen Permeability BenchmarkFinite Element Method MagneticsVirnaNo ratings yet
- Free-Samples Amie Chapters Induction-Motor-DesignDocument35 pagesFree-Samples Amie Chapters Induction-Motor-DesignGlen TuranganNo ratings yet
- Vijay Vittal, Raja Ayyanar Auth. Grid Integration and Dynamic Impact of Wind EnergyDocument152 pagesVijay Vittal, Raja Ayyanar Auth. Grid Integration and Dynamic Impact of Wind EnergyMohammad Zayed Ahmed Abo Al KeshekNo ratings yet
- Saudi Aramco Engineering Standards-Electrical-CommissioningDocument61 pagesSaudi Aramco Engineering Standards-Electrical-Commissioningsyedsalmanali9193% (15)
- Ee 2302 - Electrical Machines Ii Unit - I Synchronous Generator Part-ADocument5 pagesEe 2302 - Electrical Machines Ii Unit - I Synchronous Generator Part-AnandhakumarmeNo ratings yet
- 24 Hysteresis-Motors Reference PDFDocument5 pages24 Hysteresis-Motors Reference PDFFariba Islam100% (2)