You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- SAP - Treasury Management T-CodesDocument5 pagesSAP - Treasury Management T-CodesmrobalinhoNo ratings yet
- Integrating With HCMDocument588 pagesIntegrating With HCMbalabalabala123No ratings yet
- Tor and The Dark Net - Volume 1 (2016) PDFDocument40 pagesTor and The Dark Net - Volume 1 (2016) PDFvectorone100% (1)
- Bollard Pull AESDocument7 pagesBollard Pull AESsoongbinNo ratings yet
- Statement of Purpose UOWDocument2 pagesStatement of Purpose UOWNishant Khanal50% (2)
- Facility LayoutDocument46 pagesFacility Layoutanon-930959100% (10)
- Ciena Training: By-Arun SinghDocument60 pagesCiena Training: By-Arun SinghSunnyNo ratings yet
- 2020 15 TheaII - SvitzerJosephineDocument44 pages2020 15 TheaII - SvitzerJosephinesoongbinNo ratings yet
- Safety Flyer To The Fishing IndustryDocument2 pagesSafety Flyer To The Fishing IndustrysoongbinNo ratings yet
- KC 06-12 PDFDocument1 pageKC 06-12 PDFsoongbinNo ratings yet
- IMCA Safety Flash 17-18Document5 pagesIMCA Safety Flash 17-18soongbinNo ratings yet
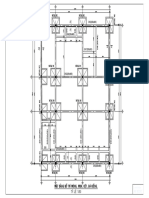
- KC - 02-12 (Mat Bang Bo Tri Mong)Document1 pageKC - 02-12 (Mat Bang Bo Tri Mong)soongbinNo ratings yet
- DM StatDocument7 pagesDM StatlxangelusxlNo ratings yet
- MIT6 0002F16 Lec3 Graph Theoretic ModelDocument38 pagesMIT6 0002F16 Lec3 Graph Theoretic ModelsoongbinNo ratings yet
- IMCA Safety Flash 16-18Document4 pagesIMCA Safety Flash 16-18soongbinNo ratings yet
- 1 Linear Regression With One VariableDocument49 pages1 Linear Regression With One VariableRamon LinsNo ratings yet
- 1 Linear Regression With One VariableDocument49 pages1 Linear Regression With One VariableRamon LinsNo ratings yet
- Twin Cranes Lift Arrangement by Orca PDFDocument6 pagesTwin Cranes Lift Arrangement by Orca PDFsoongbinNo ratings yet
- GL Iv-6-4 eDocument214 pagesGL Iv-6-4 ejobinhoeljovenNo ratings yet
- Lecture8 PDFDocument42 pagesLecture8 PDFsoongbinNo ratings yet
- Inclining Test Unified Procedure No.31Document5 pagesInclining Test Unified Procedure No.31Emrah YesiltasNo ratings yet
- SOP 1 - Writing An Article (Upwork)Document15 pagesSOP 1 - Writing An Article (Upwork)AnemNo ratings yet
- 10.27 - Pricelist ElectricalDocument12 pages10.27 - Pricelist ElectricalAsaph AdigueNo ratings yet
- Lecture 7Document70 pagesLecture 7M ShookNo ratings yet
- Goldberg 422S-422D - Datasheet, 422 LTDocument3 pagesGoldberg 422S-422D - Datasheet, 422 LTYounes ODMNo ratings yet
- June 2019 (IAL) QP - S1 EdexcelDocument24 pagesJune 2019 (IAL) QP - S1 EdexcelDummy ETHNo ratings yet
- Chapter 9 - Data PrivacyDocument32 pagesChapter 9 - Data Privacycaloy cagzNo ratings yet
- Architect ListDocument24 pagesArchitect Listzaffarabbasin786No ratings yet
- Fact CSU501Document2 pagesFact CSU501ankurNo ratings yet
- Welcome To The Adversarial Robustness Toolbox - Adversarial Robustness Toolbox 1.2.0 DocumentationDocument6 pagesWelcome To The Adversarial Robustness Toolbox - Adversarial Robustness Toolbox 1.2.0 DocumentationNida AmaliaNo ratings yet
- Xam Idea Maths Solutions Class 10 Chapter 2 PolynomialsDocument25 pagesXam Idea Maths Solutions Class 10 Chapter 2 Polynomialsexam ascent100% (1)
- Data Structure - Lesson 1Document4 pagesData Structure - Lesson 1Lady Marj RosarioNo ratings yet
- Son-CA - Lec1 - 1 - Computer Abstraction and TechnologyDocument31 pagesSon-CA - Lec1 - 1 - Computer Abstraction and TechnologyVăn NguyễnNo ratings yet
- Ingersoll Rand System Automation VX Accessory Box Visualization Software ManualDocument50 pagesIngersoll Rand System Automation VX Accessory Box Visualization Software ManualLi TANGNo ratings yet
- CNC Lab Manual 2023 Med 3102Document66 pagesCNC Lab Manual 2023 Med 3102G. RajeshNo ratings yet
- RAB Recording & Multimedia StreamingDocument2 pagesRAB Recording & Multimedia StreamingTRB RecordNo ratings yet
- Brkarc 3980Document144 pagesBrkarc 3980José AlexandreNo ratings yet
- PB302 S3 Plus Performance ControllerDocument2 pagesPB302 S3 Plus Performance ControllerZuñiga AntonioNo ratings yet
- Lecture 1 - IntroDocument57 pagesLecture 1 - IntroYi HengNo ratings yet
- Nle Mock 1 - PMC OfficialDocument205 pagesNle Mock 1 - PMC OfficialTauseef AfridiNo ratings yet
- Discovery 1: Get Started With Cisco CLI: Job AidDocument1 pageDiscovery 1: Get Started With Cisco CLI: Job AidPablo Ram PerNo ratings yet
- Project Proposal SampleDocument8 pagesProject Proposal Samplesanjunaik15No ratings yet
- DS-400 Semi-Auto Chemistry Analyzer CatalogDocument1 pageDS-400 Semi-Auto Chemistry Analyzer CatalogJason WangNo ratings yet
- Mercedes Wis en - Asra - Data - SpoolerDocument91 pagesMercedes Wis en - Asra - Data - SpoolerrtamercedesNo ratings yet
- See Catalog: Get A QuoteDocument4 pagesSee Catalog: Get A QuoteahnafNo ratings yet
- Lighting Plan L7Document1 pageLighting Plan L7Dani WaskitoNo ratings yet