You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Square D Wiring Diagram BookDocument109 pagesSquare D Wiring Diagram BookVieruth Pascua Paet100% (10)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Mercedes W245 Owner's ManualDocument262 pagesMercedes W245 Owner's Manualgelu uNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Write EssayDocument141 pagesWrite Essayamsyous100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- THE LITURGY OF THE ETHIOPIAN CHURCH: A CONCISE HISTORY AND GUIDEDocument185 pagesTHE LITURGY OF THE ETHIOPIAN CHURCH: A CONCISE HISTORY AND GUIDEmtdestaNo ratings yet
- THE LITURGY OF THE ETHIOPIAN CHURCH: A CONCISE HISTORY AND GUIDEDocument185 pagesTHE LITURGY OF THE ETHIOPIAN CHURCH: A CONCISE HISTORY AND GUIDEmtdestaNo ratings yet
- TCM HandbookDocument109 pagesTCM Handbookvijaydev75No ratings yet
- CHURCH PRAYER SERVICEDocument271 pagesCHURCH PRAYER SERVICEmtdesta100% (2)
- ICT CSS 9 Pre Test Post Test Questionnaire Answer Key1.1Document6 pagesICT CSS 9 Pre Test Post Test Questionnaire Answer Key1.1Jinky Barbie33% (3)
- Hyundai Service Guide Diesel and LPG 7 RangeDocument10 pagesHyundai Service Guide Diesel and LPG 7 Rangemichael100% (28)
- BHJDynamics Damper InfoDocument10 pagesBHJDynamics Damper Infosuhas110No ratings yet
- Script - InfusomatSpace - 3.0 PDFDocument70 pagesScript - InfusomatSpace - 3.0 PDFLeandro Daniel Leon LabradaNo ratings yet
- Belarus MTZ 50 52 Operations MaintenancesDocument36 pagesBelarus MTZ 50 52 Operations Maintenanceshotmail100% (1)
- Himamat Tselot Zeqeter03Document64 pagesHimamat Tselot Zeqeter03mtdestaNo ratings yet
- 7745858w D2-55, D2-75 OPERATOR'S MANUALDocument64 pages7745858w D2-55, D2-75 OPERATOR'S MANUALm.kelleci72480% (1)
- Fischer FH II High Performance AnchorDocument5 pagesFischer FH II High Performance AnchorJaga NathNo ratings yet
- Rapid Design Guide For Overhead ConveyorsDocument51 pagesRapid Design Guide For Overhead ConveyorsDean Anderson0% (1)
- (Man) NTN BearingHandling 9103 (Y2012)Document7 pages(Man) NTN BearingHandling 9103 (Y2012)chinck83No ratings yet
- Cutting Speeds and Feeds Guide for Drilling OperationsDocument13 pagesCutting Speeds and Feeds Guide for Drilling Operationsrautsushant21No ratings yet
- Wiring Diagram 0140CT9201Document16 pagesWiring Diagram 0140CT9201mtdestaNo ratings yet
- Milling Forces Formulas Optimize Quality ProfitDocument6 pagesMilling Forces Formulas Optimize Quality ProfitmtdestaNo ratings yet
- Cad 4 1-4 35Document12 pagesCad 4 1-4 35mtdestaNo ratings yet
- Linkage 25-Static Force AnalysisDocument9 pagesLinkage 25-Static Force AnalysisASDFSDFASDFASDFSDFNo ratings yet
- Mechanical TubesDocument50 pagesMechanical TubesKumar AnilNo ratings yet
- Bolt CapacityDocument2 pagesBolt CapacityMoonzeNo ratings yet
- Dimension Torque - ThreadsDocument4 pagesDimension Torque - ThreadsmtdestaNo ratings yet
- Wiring Diagram 0140CT9201Document16 pagesWiring Diagram 0140CT9201mtdestaNo ratings yet
- Himamat Tselot Zeselestu02Document55 pagesHimamat Tselot Zeselestu02mtdesta100% (7)
- Himamat Tselot Zenegih 01Document53 pagesHimamat Tselot Zenegih 01mtdesta88% (8)
- Electric Motors Whitepaper PDFDocument8 pagesElectric Motors Whitepaper PDFCesario GillasNo ratings yet
- EOTC Holy Week PrayersDocument11 pagesEOTC Holy Week PrayersJohn locksNo ratings yet
- Tensea Tract 1998Document2 pagesTensea Tract 1998mtdestaNo ratings yet
- Thursday ReadingDocument2 pagesThursday ReadingmtdestaNo ratings yet
- Mistirate Bete Kirstian MegibiaDocument32 pagesMistirate Bete Kirstian Megibiamtdesta100% (1)
- Fethanegest Part1Document110 pagesFethanegest Part1mtdestaNo ratings yet
- YemejemeriawutirgumseraDocument26 pagesYemejemeriawutirgumseramtdestaNo ratings yet
- Amharic Typing in VistaDocument3 pagesAmharic Typing in VistamtdestaNo ratings yet
- PU360Document38 pagesPU360schservNo ratings yet
- 04 Cuculic Celic PrencDocument8 pages04 Cuculic Celic PrencStanislava RokvicNo ratings yet
- Binzel Gorilniki Robo enDocument116 pagesBinzel Gorilniki Robo enalessia olgiatiNo ratings yet
- Sun SPARC Enterprise T5120 and T5220Document55 pagesSun SPARC Enterprise T5120 and T5220Abhimanyu BiswasNo ratings yet
- Manual Camilla Obstetrica Electrica B-48-InglesDocument15 pagesManual Camilla Obstetrica Electrica B-48-InglesBrevas CuchoNo ratings yet
- SF6 Insulated Current Transformer from 362 to 550 kVDocument2 pagesSF6 Insulated Current Transformer from 362 to 550 kVbesaretNo ratings yet
- Cross Over Cx1000 - ManualDocument12 pagesCross Over Cx1000 - ManualArmando Mojica BarriosNo ratings yet
- LEARN ABOUT ELECTRICITY AND ITS KEY TERMSDocument30 pagesLEARN ABOUT ELECTRICITY AND ITS KEY TERMSAdrielle LadazzaNo ratings yet
- 2300 - US Army Equipment - GuideDocument77 pages2300 - US Army Equipment - GuiderutiusNo ratings yet
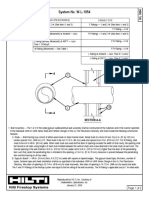
- W-L-1054 Pipe Through Gyp Board AssemblyDocument2 pagesW-L-1054 Pipe Through Gyp Board AssemblyJason StelleNo ratings yet
- 502 Series DC Power System: Netsure™Document8 pages502 Series DC Power System: Netsure™Sahand ArasNo ratings yet
- Postflood Restartprocedure HOFFMAN LAMSONDocument1 pagePostflood Restartprocedure HOFFMAN LAMSONLuis Fernando BravoNo ratings yet
- Manual Asus P5GPL-XDocument94 pagesManual Asus P5GPL-XJuan PerezNo ratings yet
- Clipper Wind PDFDocument13 pagesClipper Wind PDFyanaziNo ratings yet
- DAS Price List 2011 04Document14 pagesDAS Price List 2011 04Mavi ErtunaNo ratings yet
- Valmet612DSJL 290HPDocument67 pagesValmet612DSJL 290HPJoaopaulo Tavares0% (1)
- A Comparison of Single-Core and Dual-Core Opteron Processor Performance For HPCDocument13 pagesA Comparison of Single-Core and Dual-Core Opteron Processor Performance For HPCjagdishnewNo ratings yet
- Ymz1krvasdlwd 18 30kv CableDocument2 pagesYmz1krvasdlwd 18 30kv CableJosue Crespo GonzalezNo ratings yet
- Buried Filled Cables Type CefeDocument5 pagesBuried Filled Cables Type CefeKhaled BellegdyNo ratings yet
- Alabang MCSPDocument229 pagesAlabang MCSP[AP-STUDENT] Ina Rose LaquiNo ratings yet
- KA2131 SamsungDocument4 pagesKA2131 SamsungTito PerezNo ratings yet
- ACS 2000 Medium Voltage Drives: Technical DataDocument24 pagesACS 2000 Medium Voltage Drives: Technical DataDaigo CfNo ratings yet
- ATC500 (BMW X5 2003-06) : Revision 07/2013Document2 pagesATC500 (BMW X5 2003-06) : Revision 07/2013JanneLaukkanenNo ratings yet