You might also like
- Dynamic Analysis of Spur Gear (Danst) : TransmissionsDocument26 pagesDynamic Analysis of Spur Gear (Danst) : TransmissionsPunith MlNo ratings yet
- Modeling Parametric Vibration of Multistage Gear Systems As A Tool For Design OptimizationDocument8 pagesModeling Parametric Vibration of Multistage Gear Systems As A Tool For Design OptimizationPunith MlNo ratings yet
- Stress Waves in SolidDocument13 pagesStress Waves in SolidPunith MlNo ratings yet
- Thrusters Potts 2016Document22 pagesThrusters Potts 2016Punith MlNo ratings yet
- 2015-Dynamic Numerical Simulation of Planetary Gear System For Wind Turbine GearboxDocument6 pages2015-Dynamic Numerical Simulation of Planetary Gear System For Wind Turbine GearboxPunith MlNo ratings yet
- A232116 NASADocument245 pagesA232116 NASAPunith MlNo ratings yet
- Studying The Load Carrying Capacity of Spur Gear - 2013 - Mechanism and Machine PDFDocument13 pagesStudying The Load Carrying Capacity of Spur Gear - 2013 - Mechanism and Machine PDFBruno RibeiroNo ratings yet
- Swami VivekanandaDocument4 pagesSwami VivekanandaPunith MlNo ratings yet
- Computational Analysis of Impact of A Bullet Against The Multilayer Fabrics in LS-DYNADocument20 pagesComputational Analysis of Impact of A Bullet Against The Multilayer Fabrics in LS-DYNAPunith MlNo ratings yet
- FeDocument35 pagesFeapi-3762972No ratings yet
- 2016 Rotational Dynamics 2Document21 pages2016 Rotational Dynamics 2Punith MlNo ratings yet
- Aerospace 008Document11 pagesAerospace 008Punith MlNo ratings yet
- Dyna ModellingDocument19 pagesDyna Modellingapi-3762972No ratings yet
- You Might Look at The Rotor Dynamics FeatureDocument2 pagesYou Might Look at The Rotor Dynamics FeaturePunith MlNo ratings yet
- VGST Format 2016-17 - FinalDocument46 pagesVGST Format 2016-17 - FinalPunith Ml100% (1)
- Dyna ModellingDocument19 pagesDyna Modellingapi-3762972No ratings yet
- LS-DYNA Calculations of Shocks in Solids PDFDocument2 pagesLS-DYNA Calculations of Shocks in Solids PDFPunith MlNo ratings yet
- RP Model PDFDocument1 pageRP Model PDFPunith MlNo ratings yet
- Beam ProblemDocument1 pageBeam ProblemPunith MlNo ratings yet
- The Use of LS-DYNA To Assess The Performance of Airborne SystemsDocument9 pagesThe Use of LS-DYNA To Assess The Performance of Airborne SystemsPunith MlNo ratings yet
- Lsdyna User GroupDocument11 pagesLsdyna User GroupPunith MlNo ratings yet
- Singularity FunctionsDocument10 pagesSingularity FunctionsPunith MlNo ratings yet
- Full Fan Rig Model FBO Good ReportDocument100 pagesFull Fan Rig Model FBO Good ReportPunith MlNo ratings yet
- KXDX D H W U: 6.0 Impact LoadsDocument4 pagesKXDX D H W U: 6.0 Impact LoadsSuman SahaNo ratings yet
- Brittle Materials NotesDocument12 pagesBrittle Materials NotesPunith MlNo ratings yet
- Training CAEDocument48 pagesTraining CAEabhiseshNo ratings yet
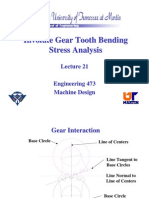
- Involute Gear Tooth Bending Stress AnalysisDocument24 pagesInvolute Gear Tooth Bending Stress AnalysisVeerasamy SureshbabuNo ratings yet
- Finite Element Method: January 12, 2004Document26 pagesFinite Element Method: January 12, 2004happyshamu100% (1)
- Training CAEDocument48 pagesTraining CAEabhiseshNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Software Testing MethodologyDocument9 pagesSoftware Testing Methodologyrajesh0120No ratings yet
- Lean Think PDFDocument13 pagesLean Think PDFசரவணகுமார் மாரியப்பன்No ratings yet
- Laporan Luaran Prosiding Internasional - SUPIYANDI - Tomuan HolbungDocument83 pagesLaporan Luaran Prosiding Internasional - SUPIYANDI - Tomuan HolbungIka Devi PerwitasariNo ratings yet
- 1302 Roland Berger - Automotive InsightsDocument52 pages1302 Roland Berger - Automotive InsightsFeiNo ratings yet
- SAP ABAP Interview QuestionsDocument9 pagesSAP ABAP Interview QuestionsJo MallickNo ratings yet
- Flowserve Safety Manual MaxFlo4 NR R03 20240411 DRAFT Version (Repariert)Document11 pagesFlowserve Safety Manual MaxFlo4 NR R03 20240411 DRAFT Version (Repariert)Iztok HaceNo ratings yet
- ARCADIS White Paper Building Information Modeling HalvorsonDocument16 pagesARCADIS White Paper Building Information Modeling HalvorsonCarlos Lopez FigueroaNo ratings yet
- IGST Claimed3Document66 pagesIGST Claimed3premierexim1No ratings yet
- Ejot - Delta PT DsDocument2 pagesEjot - Delta PT DsLucas VeronaNo ratings yet
- Ahmed Madad Proposal NormalDocument29 pagesAhmed Madad Proposal NormalDhaabar Salaax100% (1)
- Bjte 2023 Electrical and Electronics Technology Group B: TitleDocument8 pagesBjte 2023 Electrical and Electronics Technology Group B: TitleHasifz MuhammadNo ratings yet
- Chapter 4 - Maintenance Planning and Scheduling (Full Chapter) NewDocument44 pagesChapter 4 - Maintenance Planning and Scheduling (Full Chapter) NewMazlina Ashari40% (5)
- Manual de Servicio Desarme Unidad de Imagen Tde Bizhub 350Document8 pagesManual de Servicio Desarme Unidad de Imagen Tde Bizhub 350ruyNo ratings yet
- Survey of Theoretical and Experimental Coaxial Rotor Aerodynamic ResearchDocument34 pagesSurvey of Theoretical and Experimental Coaxial Rotor Aerodynamic ResearchThomas MouraNo ratings yet
- Douglas C-47Document5 pagesDouglas C-47Emerson URNo ratings yet
- BMI Vietnam Oil and Gas Report Q2 2014Document137 pagesBMI Vietnam Oil and Gas Report Q2 2014Phạm ThaoNo ratings yet
- Cloud4Wi - Solution BriefDocument25 pagesCloud4Wi - Solution BriefSureSh FreemanNo ratings yet
- MD050 - Functional Design TemplateDocument11 pagesMD050 - Functional Design TemplatepdesirajuNo ratings yet
- Project Name: (Insert Your Company Name and Logo Here)Document11 pagesProject Name: (Insert Your Company Name and Logo Here)amitsingh5No ratings yet
- Hrms TablesDocument32 pagesHrms TablesJoshua MeyerNo ratings yet
- Steinway & Sons: Buying A Legend: Presented By: Group 4Document20 pagesSteinway & Sons: Buying A Legend: Presented By: Group 4adiNo ratings yet
- Builders Hardware Manufacturers Association (BHMA) : Code Finish Description Base Material Category Nearest US EquivDocument5 pagesBuilders Hardware Manufacturers Association (BHMA) : Code Finish Description Base Material Category Nearest US EquivRey Eduard Q. UmelNo ratings yet
- IT7021 Software Testing UGDocument2 pagesIT7021 Software Testing UGSaraswathy KNo ratings yet
- Virtual Reality From Operations Management Perspective - Mosad SaberDocument37 pagesVirtual Reality From Operations Management Perspective - Mosad SaberMosad SaberNo ratings yet
- PHM - Clyde Engineering Photographic Collection Railway and Rolling StockDocument9 pagesPHM - Clyde Engineering Photographic Collection Railway and Rolling Stock4493464100% (1)
- HNK NT VTC Vert Lathes PDFDocument16 pagesHNK NT VTC Vert Lathes PDFs_barriosNo ratings yet
- Deformation Behavior of The Surface Defects of Low Carbon Steel in Wire Rod RollingDocument6 pagesDeformation Behavior of The Surface Defects of Low Carbon Steel in Wire Rod RollingAvinash KumarNo ratings yet
- Tech Spec 132KV LineDocument285 pagesTech Spec 132KV LineSanjay Rout0% (1)
- 20120522022911 (1)Document153 pages20120522022911 (1)FlankerSparrowNo ratings yet
- Procees IE Consultant IndiaDocument9 pagesProcees IE Consultant IndiaHadee SaberNo ratings yet