You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Truth About The Pentagon AttackDocument71 pagesThe Truth About The Pentagon AttackLloyd T VanceNo ratings yet
- Fluency Passages 2nd Grade PracticeDocument31 pagesFluency Passages 2nd Grade Practiceapi-305498426100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- NASA Test Pilot BiographyDocument264 pagesNASA Test Pilot BiographyAviation/Space History Library100% (1)
- Moon Landing ConspiracyDocument17 pagesMoon Landing ConspiracyElianeSalamNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Are Humans AlienDocument9 pagesAre Humans AlienkitthiNo ratings yet
- F135 Propulsion Integration Topics: Tom JohnsonDocument19 pagesF135 Propulsion Integration Topics: Tom JohnsonpopisNo ratings yet
- 10GHz Amateur Satellites PDFDocument10 pages10GHz Amateur Satellites PDFbaymanNo ratings yet
- Mars Rovers by Rich Hall VERSION - 2 - HYPOTHESISDocument94 pagesMars Rovers by Rich Hall VERSION - 2 - HYPOTHESISFiachMac100% (2)
- Ata 23 CommunicationsrDocument345 pagesAta 23 CommunicationsrpopisNo ratings yet
- A Simulation and Design Tool For A Passive Rotation Flapping Wing MechanismDocument12 pagesA Simulation and Design Tool For A Passive Rotation Flapping Wing MechanismpopisNo ratings yet
- Naca 2412Document1 pageNaca 2412popisNo ratings yet
- A Simulation and Design Tool For A Passive Rotation Flapping Wing MechanismDocument12 pagesA Simulation and Design Tool For A Passive Rotation Flapping Wing MechanismpopisNo ratings yet
- 4 Sección A A: Procesos de ManufacturaDocument1 page4 Sección A A: Procesos de ManufacturapopisNo ratings yet
- Pre Intermediate FinalDocument3 pagesPre Intermediate FinalPatrick JaneNo ratings yet
- Design, Manufacturing and Testing of A HALE-UAV Structural DemonstratorDocument11 pagesDesign, Manufacturing and Testing of A HALE-UAV Structural DemonstratorVU Dinh-QuyNo ratings yet
- Paul Mcauley - Red DustDocument410 pagesPaul Mcauley - Red DustalatlioylumNo ratings yet
- The Rotation and Revolution of The MoonDocument1 pageThe Rotation and Revolution of The Moon3735 FRANCISCO PADILLA EQUIHUANo ratings yet
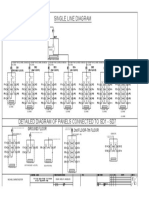
- Darms SLDDocument1 pageDarms SLDMichael DarmstaedterNo ratings yet
- Flight Testing The X-36-The Test Pilot's PerspectiveDocument15 pagesFlight Testing The X-36-The Test Pilot's Perspectivebring it onNo ratings yet
- Argo - Flare Aerial Inspection Survey PDFDocument2 pagesArgo - Flare Aerial Inspection Survey PDFanwarhas05No ratings yet
- Space Quest 2 Vorhaul Revenge WalkthroughDocument4 pagesSpace Quest 2 Vorhaul Revenge WalkthroughBladeStarNo ratings yet
- Physics GravitationDocument8 pagesPhysics GravitationkrystalNo ratings yet
- Seminar Report On Solar Sails: BY Athira Raj EEE IietDocument21 pagesSeminar Report On Solar Sails: BY Athira Raj EEE IietlakshmyachuNo ratings yet
- Ada 425580Document74 pagesAda 425580saz08No ratings yet
- Turbopump of Rocket LE-7Document25 pagesTurbopump of Rocket LE-7gurky33No ratings yet
- NASA Spinoff TechnologiesDocument4 pagesNASA Spinoff Technologiesbrian limNo ratings yet
- Ai EstDocument15 pagesAi EstRogelyn barbosaNo ratings yet
- A320 Limitations PDFDocument6 pagesA320 Limitations PDFa320neoNo ratings yet
- BILAL AliNASA Exerci SeDocument2 pagesBILAL AliNASA Exerci SeSyed Bilal AliNo ratings yet
- Mission 4: Rollercoaster: Phase 1Document7 pagesMission 4: Rollercoaster: Phase 1Camila De Campos PereiraNo ratings yet
- MHE RDG Wonders LVRDR G3 ELL U6W3 28Document24 pagesMHE RDG Wonders LVRDR G3 ELL U6W3 28Kenneth N AngelineNo ratings yet
- Projectile Motion WorksheetDocument3 pagesProjectile Motion WorksheetDilini Wijesinghe0% (1)
- Herc Handbook 2023 072822 508Document40 pagesHerc Handbook 2023 072822 508CristianNo ratings yet
- Gaji Agustus 2015 MSJDocument5 pagesGaji Agustus 2015 MSJkusnin nenNo ratings yet
- Guia Drones PDFDocument2 pagesGuia Drones PDFJosé Félix Gutierrez RosalesNo ratings yet
- European Space AgencyDocument18 pagesEuropean Space Agencynico-rNo ratings yet