You might also like
- Solution To WorkflowDocument2 pagesSolution To WorkflowMohamad SleimanNo ratings yet
- 14264A Construction Mechanic Basic Chapters 1 2Document68 pages14264A Construction Mechanic Basic Chapters 1 2Mohamad SleimanNo ratings yet
- ADVANCED METHODS FOR PRACTICAL APPLICATIONS IN FLUID MECHANICS by Steven A Jones PDFDocument243 pagesADVANCED METHODS FOR PRACTICAL APPLICATIONS IN FLUID MECHANICS by Steven A Jones PDFMohamad Sleiman100% (1)
- Screwdriver AsiaDocument392 pagesScrewdriver AsiaMohamad SleimanNo ratings yet
- Presses Reduced-6 PDFDocument10 pagesPresses Reduced-6 PDFMohamad SleimanNo ratings yet
- Valve Handbook LowRes PDFDocument37 pagesValve Handbook LowRes PDFMohamad SleimanNo ratings yet
- 9319 GB Hydraulic Presses Brochure LRDocument24 pages9319 GB Hydraulic Presses Brochure LRMohamad Sleiman100% (1)
- 2015 01 Leaflet7 Employment of Foreign Workers 2Document26 pages2015 01 Leaflet7 Employment of Foreign Workers 2Mohamad SleimanNo ratings yet
- Clutches and Brakes 0Document16 pagesClutches and Brakes 0Mohamad SleimanNo ratings yet
- DKE344 BibDocument2 pagesDKE344 BibMohamad SleimanNo ratings yet
- Rotating Equipment Chapter 6Document19 pagesRotating Equipment Chapter 6Mohamad SleimanNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Archimate 3.1 - Delegate PackDocument318 pagesArchimate 3.1 - Delegate PackvinodNo ratings yet
- GSX9000 Server GuideDocument6 pagesGSX9000 Server Guideshoaib50100% (1)
- Object Oriented Programming Methodology Using Java: Prof: Pradnya Sadigale (E&Tcdepartment)Document39 pagesObject Oriented Programming Methodology Using Java: Prof: Pradnya Sadigale (E&Tcdepartment)pradnya sadigaleNo ratings yet
- Current Computer Forensics ToolsDocument15 pagesCurrent Computer Forensics ToolsVediappan GaneshanNo ratings yet
- Restructuring of The Swedish National Grid Control Centres: Session 2004Document7 pagesRestructuring of The Swedish National Grid Control Centres: Session 2004ramsesiNo ratings yet
- Design and Development of CNC Writing and Drawing MachineDocument6 pagesDesign and Development of CNC Writing and Drawing MachineVIVA-TECH IJRINo ratings yet
- T4S Post Amendment 15.09.2020Document130 pagesT4S Post Amendment 15.09.2020kambanNo ratings yet
- Sustainability 12 06687 v2Document23 pagesSustainability 12 06687 v2Filmon TNo ratings yet
- Sesi CVDocument3 pagesSesi CVThabisoNo ratings yet
- Lovehatethings 2008Document107 pagesLovehatethings 2008Anthony MarcoNo ratings yet
- Specifications of 3c20ks-lcd En-Sp011222-3c20ks-LcdDocument4 pagesSpecifications of 3c20ks-lcd En-Sp011222-3c20ks-LcdBbb AaaNo ratings yet
- An English Temne DictionaryDocument423 pagesAn English Temne Dictionary1scribe2011No ratings yet
- Abacus Junior 30Document4 pagesAbacus Junior 30郑伟健No ratings yet
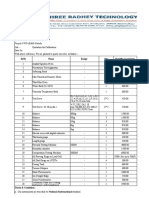
- SRT/2020-21/11/29 To. M/S Deputy Director Research Lab: Punjab PWD (B&R) PatialaDocument4 pagesSRT/2020-21/11/29 To. M/S Deputy Director Research Lab: Punjab PWD (B&R) PatialaAyush GoyalNo ratings yet
- SAC-01-1 Test AnswersDocument2 pagesSAC-01-1 Test AnswersAntonio AlanisNo ratings yet
- Eurocell Panel Vertical Polarization Half-Power Beam WidthDocument1 pageEurocell Panel Vertical Polarization Half-Power Beam WidthGEORGENo ratings yet
- Equipment Installation Verification Procedure:: How To Use This DocumentDocument3 pagesEquipment Installation Verification Procedure:: How To Use This DocumentBasha Yazn AnjakNo ratings yet
- Presentation On Core JavaDocument16 pagesPresentation On Core Javaprince himanshu0% (1)
- Amazon - de Android TV BoxDocument1 pageAmazon - de Android TV BoxMirelaBurgic-SalihovicNo ratings yet
- Masterpieces of Piano MusicDocument562 pagesMasterpieces of Piano Musichtrung2101100% (1)
- Pa2X Loading OS and Resources PDFDocument16 pagesPa2X Loading OS and Resources PDFAnonymous teB7D6jNo ratings yet
- Process Modeling: C H A P T E RDocument43 pagesProcess Modeling: C H A P T E RSuryakumala JosephineNo ratings yet
- Asic Prototyping AldecDocument10 pagesAsic Prototyping AldecKhaled Abou ElseoudNo ratings yet
- 3010 3020 - SchematicsDocument14 pages3010 3020 - SchematicsClaudine LeeNo ratings yet
- Republic of The Philippines Quezon City Branch: T C 1 P U"Document8 pagesRepublic of The Philippines Quezon City Branch: T C 1 P U"Kim john defiestaNo ratings yet
- PentesterLab SolutionsDocument48 pagesPentesterLab SolutionsDIPAMA MichelNo ratings yet
- Basic Structural Analysis, 3/e: Book Information Sheet Book Information SheetDocument2 pagesBasic Structural Analysis, 3/e: Book Information Sheet Book Information SheetHOUSEFULL MOVIE'SNo ratings yet
- Advantages and Disadvantages of Phase ModulationDocument1 pageAdvantages and Disadvantages of Phase ModulationbansenNo ratings yet
- Cs Aip Class 10th Boys GroupDocument24 pagesCs Aip Class 10th Boys GroupMahafuj DudhaknojNo ratings yet