You might also like
- Ee410 Final Design ProjectDocument4 pagesEe410 Final Design Projectapi-294954225No ratings yet
- Final Project Jhu Fall 2018Document10 pagesFinal Project Jhu Fall 2018api-294954225No ratings yet
- Ee410 Honors Option PaperDocument3 pagesEe410 Honors Option Paperapi-294954225No ratings yet
- Group 1 Final LabDocument17 pagesGroup 1 Final Labapi-294954225No ratings yet
- Proposal 1Document4 pagesProposal 1api-294954225No ratings yet
- Ee 300w Lab 2Document15 pagesEe 300w Lab 2api-294954225No ratings yet
- Innovation in Current Source DesignDocument17 pagesInnovation in Current Source Designapi-294954225No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- STM 32 WL 55 JCDocument147 pagesSTM 32 WL 55 JCDaniel Gustavo Martinez MartinezNo ratings yet
- ResumeDocument3 pagesResumeAshok Reddy ChenikalaNo ratings yet
- EE8691-Embedded SystemsDocument12 pagesEE8691-Embedded SystemsumramanNo ratings yet
- SudarshanDocument11 pagesSudarshanSudarshan MankadNo ratings yet
- Research On Automatic Bike Starter KitDocument38 pagesResearch On Automatic Bike Starter KitGokul RajaNo ratings yet
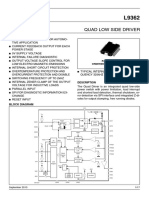
- Quad Low Side DriverDocument17 pagesQuad Low Side DriverNeil SuárezNo ratings yet
- Uvm Cookbook Complete Verification AcademyDocument599 pagesUvm Cookbook Complete Verification AcademySandip Bhadani83% (6)
- T 1000S ManualDocument8 pagesT 1000S ManualAdmir BašićNo ratings yet
- AN3-SL900A-RFID Interface Device Setup Guide PDFDocument12 pagesAN3-SL900A-RFID Interface Device Setup Guide PDFValery KirylhcukNo ratings yet
- ALC4042 DataSheet 1.2Document23 pagesALC4042 DataSheet 1.2Wi Wi RaNo ratings yet
- 18F4550 MicrochipTechnologyDocument6 pages18F4550 MicrochipTechnologySoro FoxNo ratings yet
- MSP430F673x, MSP430F672x Mixed-Signal Microcontrollers: 1 Device OverviewDocument146 pagesMSP430F673x, MSP430F672x Mixed-Signal Microcontrollers: 1 Device Overviewercan akalanNo ratings yet
- SPC563M64L7Document142 pagesSPC563M64L7quemasda quiensoyNo ratings yet
- User's Guide: TUSB926x Flash BurnerDocument37 pagesUser's Guide: TUSB926x Flash BurnerMehran MehiNo ratings yet
- Enrico Caruso 14 Dv14 MLK - Dis 11282-Sc 0103 Dell 2420Document104 pagesEnrico Caruso 14 Dv14 MLK - Dis 11282-Sc 0103 Dell 2420Fernanda Ferreira de FreitasNo ratings yet
- RF Diversity and 1.2 GHZ Bandwidth Observation Receiver: Data SheetDocument138 pagesRF Diversity and 1.2 GHZ Bandwidth Observation Receiver: Data Sheet넹넹No ratings yet
- 2gs1011ms pb1Document2 pages2gs1011ms pb1Henning BaarNo ratings yet
- APX7000 APX7000XE Detailed Service Manual 6875961M01 - HDocument644 pagesAPX7000 APX7000XE Detailed Service Manual 6875961M01 - HChuckNo ratings yet
- Broadcom 01 04 2018 53262M DS302 R 1275363 PDFDocument400 pagesBroadcom 01 04 2018 53262M DS302 R 1275363 PDFPraneeth PraniNo ratings yet
- Group 6 Research STE 10 BATCH 2020-21Document11 pagesGroup 6 Research STE 10 BATCH 2020-21Alhouexa Loreen AguilarNo ratings yet
- GpiozeroDocument222 pagesGpiozerobordeiumNo ratings yet
- MyrioDocument32 pagesMyrioHanh MạcNo ratings yet
- COMP600 Spring Lab#1Document3 pagesCOMP600 Spring Lab#1jassica sahiNo ratings yet
- 23BE40 CS enDocument9 pages23BE40 CS enDario OchoaNo ratings yet
- Embedded System: Serial Peripheral Interface (SPI)Document31 pagesEmbedded System: Serial Peripheral Interface (SPI)yuosef hababaNo ratings yet
- Oscilloscope: Selection GuideDocument21 pagesOscilloscope: Selection GuideShahrin MahatNo ratings yet
- E560 Modbus SubDocument75 pagesE560 Modbus SubTauqeer AhmedNo ratings yet
- Mcf52235 Coldfire Integrated Microcontroller Reference ManualDocument660 pagesMcf52235 Coldfire Integrated Microcontroller Reference ManualVgForceNo ratings yet
- F8eb7 Quanta BDBD PDFDocument45 pagesF8eb7 Quanta BDBD PDFtrutleptNo ratings yet
- Final Year Comp Engg SyllabusSem VII VIII 11-08-2020Document42 pagesFinal Year Comp Engg SyllabusSem VII VIII 11-08-2020Rajnikant NarwadeNo ratings yet