You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Non Parametric PredictionDocument16 pagesNon Parametric PredictionTraderCat SolarisNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Non Parametric Estimation For Financial Investment Under Log-UtilityDocument193 pagesNon Parametric Estimation For Financial Investment Under Log-UtilityTraderCat SolarisNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Principal Component and Constantly Re-Balanced Portfolio - SlidesDocument65 pagesPrincipal Component and Constantly Re-Balanced Portfolio - SlidesTraderCat SolarisNo ratings yet
- Fix-5.0 SP1 Vol-3Document160 pagesFix-5.0 SP1 Vol-3TraderCat SolarisNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Fix-5.0 SP1 Vol-2Document9 pagesFix-5.0 SP1 Vol-2TraderCat SolarisNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Fix-5.0 SP1 Vol-7Document233 pagesFix-5.0 SP1 Vol-7TraderCat SolarisNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Fix-5.0 SP1 Vol-6Document434 pagesFix-5.0 SP1 Vol-6TraderCat SolarisNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Fourier SeriesDocument440 pagesFourier SeriesTraderCat SolarisNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Fix-5.0 SP1 Vol-1Document144 pagesFix-5.0 SP1 Vol-1TraderCat SolarisNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Time Series AnalysisDocument240 pagesTime Series AnalysisImamNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Brief Notes #4 Random Vectors: and XDocument4 pagesBrief Notes #4 Random Vectors: and XTraderCat SolarisNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Time Series Documentation - MathematicaDocument214 pagesTime Series Documentation - MathematicaTraderCat Solaris100% (2)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Brief Notes #3 Random Variables: Continuous DistributionsDocument3 pagesBrief Notes #3 Random Variables: Continuous DistributionsTraderCat SolarisNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Brief Notes #2 Random Variables: Discrete DistributionsDocument3 pagesBrief Notes #2 Random Variables: Discrete DistributionsTraderCat SolarisNo ratings yet
- HHT Basics - SlidesDocument64 pagesHHT Basics - SlidesTraderCat SolarisNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ProbabilityDocument520 pagesProbabilityTraderCat SolarisNo ratings yet
- Brief Notes #1 Events and Their Probability: DefinitionsDocument3 pagesBrief Notes #1 Events and Their Probability: DefinitionsTraderCat SolarisNo ratings yet
- Theory of InterestDocument15 pagesTheory of InterestTraderCat SolarisNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- What Is An Electrical Switch?Document6 pagesWhat Is An Electrical Switch?Aeylla ZeoraineNo ratings yet
- RTD of CSTR Observation and CalculatoinsDocument27 pagesRTD of CSTR Observation and CalculatoinsLucifer MorningstarNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
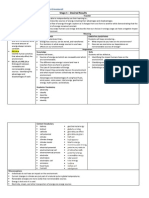
- UBD Physics Unit 2 - Energy and The EnviornmentDocument5 pagesUBD Physics Unit 2 - Energy and The EnviornmentAlfred Melvin SolivaNo ratings yet
- BS 300Document121 pagesBS 300Anonymous GhWU5YK8No ratings yet
- Physcis Unit Test 3Document5 pagesPhyscis Unit Test 3Yuta NeyaNo ratings yet
- Overhead Line Design NotesDocument35 pagesOverhead Line Design NotesiaessackjeeNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Chapter 2 Lecture Nuclear Stability and ModelsDocument24 pagesChapter 2 Lecture Nuclear Stability and ModelsSepamoNo ratings yet
- Rabia7 Base 28.02 EmbedDocument7 pagesRabia7 Base 28.02 EmbedvengadNo ratings yet
- 2.2 GHZ Laser HHODocument32 pages2.2 GHZ Laser HHOalkatrash100% (3)
- Servo Solenoid ValvesDocument204 pagesServo Solenoid Valveschandushar1604100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Modified Windkessel Model Applied in A Tubular Pulsation Dampener AnalysisDocument11 pagesModified Windkessel Model Applied in A Tubular Pulsation Dampener AnalysisFrancesca CoattiNo ratings yet
- Analysis of Non-Uniform Torsion in Curved Incrementally Launched PDFDocument14 pagesAnalysis of Non-Uniform Torsion in Curved Incrementally Launched PDFYONAS GOSANo ratings yet
- Cotton Dyeing With Natural Dye Extracted From Pomegranate PDFDocument5 pagesCotton Dyeing With Natural Dye Extracted From Pomegranate PDFAmalia RizkaNo ratings yet
- Chemistry: Pearson EdexcelDocument28 pagesChemistry: Pearson EdexcelNyraStardollNo ratings yet
- Astronomy - 12 - 15 - 18 - 5 - 6 KeyDocument11 pagesAstronomy - 12 - 15 - 18 - 5 - 6 Keykalidindi_kc_krishnaNo ratings yet
- State EstimationDocument13 pagesState Estimationkubera uNo ratings yet
- Model 549: General & Small Parts PhantomDocument3 pagesModel 549: General & Small Parts PhantomMiguel De Los Santos PavisicNo ratings yet
- A Computational Fluid Dynamics Model of Algal Growth Development and ValidationDocument11 pagesA Computational Fluid Dynamics Model of Algal Growth Development and ValidationsuyyinNo ratings yet
- DIAGRAM RAYMOND 4150-4250 - 30000-Up - SC - 1124958CDocument10 pagesDIAGRAM RAYMOND 4150-4250 - 30000-Up - SC - 1124958CRicardo Javier Lopez GarciaNo ratings yet
- MAG8000 Manual PDFDocument137 pagesMAG8000 Manual PDFHanks EpphNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- MALA MiniMIRA Technical SpecificationsDocument1 pageMALA MiniMIRA Technical SpecificationsALfian FebriantoNo ratings yet
- Solutions Manual To Introduction To Continuum Mechanics: Second EditionDocument247 pagesSolutions Manual To Introduction To Continuum Mechanics: Second EditionRaj Pratyush80% (5)
- The Physics of VolleyballDocument2 pagesThe Physics of VolleyballMary Grace Arcayan LoberianoNo ratings yet
- Aestiva MRIDocument18 pagesAestiva MRImalamandeaceroNo ratings yet
- Adnan Aljarallah 1988 Kinetic of MTBE Over AmberlystDocument6 pagesAdnan Aljarallah 1988 Kinetic of MTBE Over AmberlystJason NunezNo ratings yet
- Astro Solar Information-EDocument1 pageAstro Solar Information-EMutoha ArkanuddinNo ratings yet
- TCRT 1000Document7 pagesTCRT 1000Costel MirzacNo ratings yet
- Dissipation Test - ENGDocument3 pagesDissipation Test - ENGADS ADSNo ratings yet
- Organic Chemistry Lab Formal Report FormatDocument2 pagesOrganic Chemistry Lab Formal Report FormatJohn Kenneth PranadaNo ratings yet
- Structure of The AtomDocument24 pagesStructure of The AtomKunalNo ratings yet