You might also like
- IPERC Demolicion de Concreto Existente 2Document3 pagesIPERC Demolicion de Concreto Existente 2Kathy Gutierrez AguirreNo ratings yet
- Artículos Sobre Las TeoríasDocument9 pagesArtículos Sobre Las TeoríasKathy Gutierrez AguirreNo ratings yet
- Spwpweldhazards PDFDocument10 pagesSpwpweldhazards PDFAnderson Choquepata CalcinaNo ratings yet
- La Seguridad en Los AlmacenesDocument9 pagesLa Seguridad en Los AlmacenesKathy Gutierrez AguirreNo ratings yet
- Modulo Ingles PDFDocument88 pagesModulo Ingles PDFBrenda Lara RuizNo ratings yet
- Perú Golden Fruits - GestionDocument9 pagesPerú Golden Fruits - GestionKathy Gutierrez AguirreNo ratings yet
- Instructivo TEAMSDocument3 pagesInstructivo TEAMSKathy Gutierrez AguirreNo ratings yet
- Comunicado N 03Document6 pagesComunicado N 03Kathy Gutierrez AguirreNo ratings yet
- Concesion de Derecho CorregidoDocument11 pagesConcesion de Derecho CorregidoKathy Gutierrez AguirreNo ratings yet
- Guía para El Retorno A Las Labores en El MTPE PDFDocument20 pagesGuía para El Retorno A Las Labores en El MTPE PDFHector Alejandro De la Cruz DiazNo ratings yet
- Logistica para La Produccion de Bienes o Servicios PDFDocument7 pagesLogistica para La Produccion de Bienes o Servicios PDFKathy Gutierrez AguirreNo ratings yet
- Gestion de MantenimientoDocument250 pagesGestion de MantenimientoJassonMendozaNo ratings yet
- Logistica para La Produccion de Bienes o Servicios PDFDocument7 pagesLogistica para La Produccion de Bienes o Servicios PDFKathy Gutierrez AguirreNo ratings yet
- Pe-Pry-048 Rev.0 - Procedimientos Trabajos en CalienteDocument12 pagesPe-Pry-048 Rev.0 - Procedimientos Trabajos en CalientejairoNo ratings yet
- Caso Práctico 02Document7 pagesCaso Práctico 02Kathy Gutierrez AguirreNo ratings yet
- El Hombre de ChivaterosDocument4 pagesEl Hombre de ChivaterosKathy Gutierrez AguirreNo ratings yet
- GR2 Corte Por Chorro de AguaDocument17 pagesGR2 Corte Por Chorro de AguaKathy Gutierrez AguirreNo ratings yet
- UNIDAD IV Unitarizacion de La Carga, Almacenamiento y Distribucion Fisica-1Document64 pagesUNIDAD IV Unitarizacion de La Carga, Almacenamiento y Distribucion Fisica-1Kathy Gutierrez AguirreNo ratings yet
- Chiavenato (1999)Document15 pagesChiavenato (1999)Melina Sicurella50% (2)
- Prensa y CalderaDocument12 pagesPrensa y CalderaKathy Gutierrez AguirreNo ratings yet
- EL TEXTO DESCRIPTIVO: Cómo describir objetos, personas y lugares de forma efectivaDocument10 pagesEL TEXTO DESCRIPTIVO: Cómo describir objetos, personas y lugares de forma efectivaKathy Gutierrez AguirreNo ratings yet
- CASO - Analisis de Diagnóstico y Propuesta LogísticaDocument1 pageCASO - Analisis de Diagnóstico y Propuesta LogísticaKathy Gutierrez Aguirre100% (1)
- Sesion 1 - Buenas Practicas Logisticas NestleDocument22 pagesSesion 1 - Buenas Practicas Logisticas NestleKathy Gutierrez Aguirre0% (1)
- Imprenta Luque S.L. v1Document12 pagesImprenta Luque S.L. v1Kathy Gutierrez AguirreNo ratings yet
- Animales en Peligro de ExtincionDocument8 pagesAnimales en Peligro de ExtincionKathy Gutierrez AguirreNo ratings yet
- DIAPOSITIVAS Logistica-InversaDocument40 pagesDIAPOSITIVAS Logistica-InversaKathy Gutierrez Aguirre100% (1)
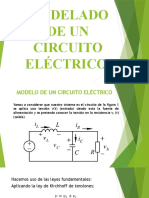
- Modelado de Un Circuito EléctricoDocument5 pagesModelado de Un Circuito EléctricoKathy Gutierrez AguirreNo ratings yet
- Diapositivas Modelado de Un Circuito EléctricoDocument12 pagesDiapositivas Modelado de Un Circuito EléctricoKathy Gutierrez AguirreNo ratings yet
- Logistica EmpresarialDocument57 pagesLogistica EmpresarialMiguel Isaias Salgado CotaNo ratings yet
- Espacios Moduli de Haces Vectoriales y Parejas de Tipo (N, D, K)Document59 pagesEspacios Moduli de Haces Vectoriales y Parejas de Tipo (N, D, K)jhon franklinNo ratings yet
- Estrategia de procesos en Wheeled Coach: fabricante de ambulanciasDocument2 pagesEstrategia de procesos en Wheeled Coach: fabricante de ambulanciasBorwinVistin0% (4)
- Manual de Emprendimiento SecundariaDocument369 pagesManual de Emprendimiento SecundariaJose Ramos SolanoNo ratings yet
- Manual de Administracion de ContratosDocument41 pagesManual de Administracion de Contratoscarmen espinozaNo ratings yet
- Modelo para Perfil Del ProyectoDocument10 pagesModelo para Perfil Del ProyectoAnonymous vPA8du3No ratings yet
- Mejoramiento y Rehabilitacion de La Carretera Ayacucho - Abancay, Tramo IV, Pertenece A La Ruta PE-28BDocument120 pagesMejoramiento y Rehabilitacion de La Carretera Ayacucho - Abancay, Tramo IV, Pertenece A La Ruta PE-28BWilson BautistaNo ratings yet
- Fundamentos de Ingeniería de Yacimientos - Magdalena Paris de FerrerDocument588 pagesFundamentos de Ingeniería de Yacimientos - Magdalena Paris de FerrerSteven Barreto96% (28)
- Practica Uml 2011Document3 pagesPractica Uml 2011WILMAR COPETE MARIN0% (1)
- Optimización del proceso de maquinado minimizando tiempo y costosDocument25 pagesOptimización del proceso de maquinado minimizando tiempo y costosAxel DNo ratings yet
- ViscosidadDocument4 pagesViscosidadJose Maria Herrera SaraviaNo ratings yet
- Monitoreo-Y-Medicion Politica Integral Economia NaranjaDocument26 pagesMonitoreo-Y-Medicion Politica Integral Economia NaranjalibardoNo ratings yet
- Taller 1 Clasificacion de Las Sustancias Quimicas YANBAL (Rodrigo Forero)Document3 pagesTaller 1 Clasificacion de Las Sustancias Quimicas YANBAL (Rodrigo Forero)Rodrigo Forero VelásquezNo ratings yet
- Practica 1 BiocaDocument7 pagesPractica 1 BiocaVAZQUEZ GOMEZ DEL VILLAR MICHELLENo ratings yet
- Antología 2015-Ii Taller de Liderazgo PDFDocument129 pagesAntología 2015-Ii Taller de Liderazgo PDFLisset Daviran GutierrezNo ratings yet
- Sap Productivity PakDocument45 pagesSap Productivity Pakisidoro71No ratings yet
- Fisica Hoja de Trabajo 01 - Método CientíficoDocument4 pagesFisica Hoja de Trabajo 01 - Método CientíficoBrandon RodriguezNo ratings yet
- El Diario de Ana FrankDocument6 pagesEl Diario de Ana FrankLucia Toro VidalNo ratings yet
- Actividad Entregable 2 FisicaDocument6 pagesActividad Entregable 2 FisicaEL BRANDON100% (1)
- 1786 PDFDocument464 pages1786 PDFWilmer Galvis100% (1)
- Ensayo Argumentativo N°1 FinalisimoDocument4 pagesEnsayo Argumentativo N°1 FinalisimoKelyZulemaTacoraDuranNo ratings yet
- Guía para Lectura Crítica de ArtículosDocument2 pagesGuía para Lectura Crítica de ArtículosOscar ZarateNo ratings yet
- Accu-214 TrabajofinalDocument4 pagesAccu-214 Trabajofinalbrayanhuarocclimachieldi9No ratings yet
- Ficha Barras de Refuerzo AZADocument2 pagesFicha Barras de Refuerzo AZAobrerorumberoNo ratings yet
- Actividad Calculo Diferencial e Integ Oo1Document12 pagesActividad Calculo Diferencial e Integ Oo1fernando janesNo ratings yet
- Chasqui 137Document452 pagesChasqui 137Jhony GarcíaNo ratings yet
- Guia para El Estudio de PFNM en EcuadorDocument41 pagesGuia para El Estudio de PFNM en EcuadorAndrew HunterNo ratings yet
- Entrevista JuanDocument5 pagesEntrevista Juansuyapa hernandesNo ratings yet
- Pentacloro saume fungicida de semillaDocument3 pagesPentacloro saume fungicida de semillaChristian A. Navarro BazalarNo ratings yet
- Convocatoria Familias ResponsablesDocument3 pagesConvocatoria Familias ResponsablesTere VelasquezNo ratings yet
- Manual para La Comercializacion de Oro A Mineros de SubsistenciaDocument2 pagesManual para La Comercializacion de Oro A Mineros de Subsistencialuis fernando galindo foreroNo ratings yet