You might also like
- Estaciones TotalesDocument10 pagesEstaciones TotalesΙωσήφ ΓκονζάλεςNo ratings yet
- Seleccion de Et Por Precision de Distancia v1Document4 pagesSeleccion de Et Por Precision de Distancia v1vethoNo ratings yet
- PG-1576 - Rojas Uyuquipa, Clement PDFDocument232 pagesPG-1576 - Rojas Uyuquipa, Clement PDFvethoNo ratings yet
- DISMAT Manual Inst Tuberias PVCDocument12 pagesDISMAT Manual Inst Tuberias PVCRodicoNo ratings yet
- PG-1070-De La Cruz Rojas, Oscar Celso PDFDocument123 pagesPG-1070-De La Cruz Rojas, Oscar Celso PDFvethoNo ratings yet
- Valor GanadoDocument3 pagesValor GanadoNely Tipula QuispeNo ratings yet
- PG-1070-De La Cruz Rojas, Oscar Celso PDFDocument123 pagesPG-1070-De La Cruz Rojas, Oscar Celso PDFvethoNo ratings yet
- Procesos Windows PDFDocument52 pagesProcesos Windows PDFvethoNo ratings yet
- PG-1158-Ticona Kapquequi, Ronald FabioDocument178 pagesPG-1158-Ticona Kapquequi, Ronald FabiovethoNo ratings yet
- PG-1576 - Rojas Uyuquipa, Clement PDFDocument232 pagesPG-1576 - Rojas Uyuquipa, Clement PDFvethoNo ratings yet
- Manual de Procedimientos Geodésicos y Topográficos de La CNR Al 06-08-15Document78 pagesManual de Procedimientos Geodésicos y Topográficos de La CNR Al 06-08-15esteban0% (1)
- PG-651-Tola Vargas, Richard PDFDocument134 pagesPG-651-Tola Vargas, Richard PDFvethoNo ratings yet
- Manual Primavera P6Document89 pagesManual Primavera P6vethoNo ratings yet
- Tabla Rugosidad Absoluta MaterialesDocument1 pageTabla Rugosidad Absoluta MaterialesPerez JsNo ratings yet
- SDDocument74 pagesSDwalterpe1No ratings yet
- Analisis y Ejecucion de Mov. D Tierras MAS - ICIV-L - 029Document137 pagesAnalisis y Ejecucion de Mov. D Tierras MAS - ICIV-L - 029frankxitoo zea rodrgzNo ratings yet
- Analisis Del Metodo de Planificacion LinealDocument105 pagesAnalisis Del Metodo de Planificacion LinealvethoNo ratings yet
- Curso Sewercad Ing Lenin PDFDocument46 pagesCurso Sewercad Ing Lenin PDFvethoNo ratings yet
- Abastecimiento Diseño y Construccion de Un Sistema de Agua Potable y AlcantarilladoDocument401 pagesAbastecimiento Diseño y Construccion de Un Sistema de Agua Potable y AlcantarilladoDario TorresNo ratings yet
- Guia Rapida SDL50-30 Nivel DigitalDocument13 pagesGuia Rapida SDL50-30 Nivel DigitalvethoNo ratings yet
- Libro de Ingeniería Sanitaria IIDocument348 pagesLibro de Ingeniería Sanitaria IIJhon Carhuachin100% (2)
- Icg SWC2010 02 PDFDocument47 pagesIcg SWC2010 02 PDFvethoNo ratings yet
- Agua Potable para Poblaciones Rurales Sistemas de AbastecimDocument165 pagesAgua Potable para Poblaciones Rurales Sistemas de AbastecimJose Luis Huancollo Goyzueta60% (5)
- Bajada Datos SDL TOOL Nivel DigitalDocument5 pagesBajada Datos SDL TOOL Nivel DigitalEdwin VelasquezNo ratings yet
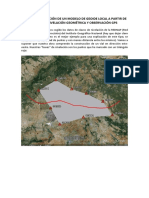
- Creación Modelo de Geoide PDFDocument20 pagesCreación Modelo de Geoide PDFvethoNo ratings yet
- Como Hacer Una Tesis en 30 DiasDocument1 pageComo Hacer Una Tesis en 30 DiasAlexs Sander Mamani QuispeNo ratings yet
- Icg SWC2010 01 PDFDocument30 pagesIcg SWC2010 01 PDFvethoNo ratings yet
- Modelamiento de Una Red de Agua en WatercadDocument45 pagesModelamiento de Una Red de Agua en WatercadRudi Ponce AguilarNo ratings yet
- Procesos Windows PDFDocument52 pagesProcesos Windows PDFvethoNo ratings yet
- Relactancia 1Document5 pagesRelactancia 1Danny MurciaNo ratings yet
- Estemp m4 Ejercicio2Document15 pagesEstemp m4 Ejercicio2Felipe Marchant Rebolledo40% (5)
- Matemáticas Udi 4 PDFDocument2 pagesMatemáticas Udi 4 PDFSonia Sánchez Barranco100% (1)
- Libreto Día Del LogroDocument2 pagesLibreto Día Del LogroXandy Solange Meza VillanedaNo ratings yet
- HistoriaDocument3 pagesHistoriaRoberth Nuñez Flores0% (1)
- Percepción de adultos mayores en pobreza sobre programas de atenciónDocument54 pagesPercepción de adultos mayores en pobreza sobre programas de atenciónYká Anoka TanNo ratings yet
- ¿De Qué Nos Van A PerdonarDocument2 pages¿De Qué Nos Van A PerdonarderzuuuNo ratings yet
- Capitulo 1 - Los Sistemas Electricos - 2018Document61 pagesCapitulo 1 - Los Sistemas Electricos - 2018DEITMAR ALENKAR WARNES MENACHONo ratings yet
- Electricidad EstaticaDocument11 pagesElectricidad Estaticaliz50% (2)
- Presión de VaporDocument4 pagesPresión de VaporJuly Vergara100% (1)
- Teoria de La Justicia y Velo de Ignorancia RalwsDocument6 pagesTeoria de La Justicia y Velo de Ignorancia RalwsJuan Carlos Caicedo MolinaNo ratings yet
- Tes I SsssssDocument94 pagesTes I SsssssVeronica PhelpsNo ratings yet
- Aful Tarde - Semana 8Document3 pagesAful Tarde - Semana 8Sengundo Rojas RamosNo ratings yet
- G.Jasiner - Los Grupos Centrados en Una TareaDocument3 pagesG.Jasiner - Los Grupos Centrados en Una TareaJulia PavoneNo ratings yet
- Análisis por viento de letrero publicitario (tipo muro aislado) - Cálculo de presión netaDocument4 pagesAnálisis por viento de letrero publicitario (tipo muro aislado) - Cálculo de presión netaAlfredo I. Baez RamirezNo ratings yet
- Cálculo I PDFDocument5 pagesCálculo I PDFginotrucheliNo ratings yet
- 9na-Semana-Legislacion 220 0Document30 pages9na-Semana-Legislacion 220 0Alexander BarazordaNo ratings yet
- Jesús nos invita a ser mejores personasDocument2 pagesJesús nos invita a ser mejores personasJhamil LopezNo ratings yet
- Calixto GarmendiaDocument1 pageCalixto Garmendialiliana cabrera juradoNo ratings yet
- Anon - Litelantes en EspañaDocument59 pagesAnon - Litelantes en EspañaEliana Ruth Condor VillegasNo ratings yet
- P 1 Presion USMP 2021Document60 pagesP 1 Presion USMP 2021JESSELY ROSALÍ MUÑOZ NEYRA100% (1)
- La Conversion de Energia ElectromecanicaDocument7 pagesLa Conversion de Energia ElectromecanicaAlexis TibanNo ratings yet
- Especialidad de Arte de Contar HistoriaDocument2 pagesEspecialidad de Arte de Contar HistoriaViviana CalderonNo ratings yet
- Razonamiento Transductivo PiagetDocument6 pagesRazonamiento Transductivo PiagetFlor Ruiz100% (3)
- Proceso de Produccion de EL Abra 4.0Document25 pagesProceso de Produccion de EL Abra 4.0Sebastian Angel Montecinos50% (2)
- Guia Metodologia Maria Fernandez 5to Año BDocument5 pagesGuia Metodologia Maria Fernandez 5to Año BMaria FernandezNo ratings yet
- Unidad II. El Estudio de Los Fenómenos Naturales Desde Una Perspectiva InterdisciplinarDocument3 pagesUnidad II. El Estudio de Los Fenómenos Naturales Desde Una Perspectiva InterdisciplinarMarysol SalgadoNo ratings yet
- Resumenes Por CapítuloDocument11 pagesResumenes Por CapítuloEdwin FiNo ratings yet
- Examen Parcial Impuesto de Renta Semana 4Document17 pagesExamen Parcial Impuesto de Renta Semana 4Oscar Ronderos InfanteNo ratings yet
- Trastornos PersonalidadDocument1 pageTrastornos PersonalidadÁngel Silva100% (1)