You might also like
- Manual de Programacion - Brazo Manipulador C-5Document14 pagesManual de Programacion - Brazo Manipulador C-5destino29No ratings yet
- Arduino JDDocument73 pagesArduino JDCarlos Sosa100% (1)
- MQTT y Node RedDocument10 pagesMQTT y Node RedRaul JasoNo ratings yet
- EL - Sistemas Integrados Con Arduino PDFDocument151 pagesEL - Sistemas Integrados Con Arduino PDFmiltonNo ratings yet
- Robot Lego PDFDocument132 pagesRobot Lego PDFNatalia100% (1)
- APDS Interrupciones 2017 2 v1Document46 pagesAPDS Interrupciones 2017 2 v1Cesar CabreraNo ratings yet
- Documentación JavaDocument149 pagesDocumentación Javaviguita75No ratings yet
- Puerto ParaleloDocument6 pagesPuerto ParaleloAndrés A. PavónNo ratings yet
- MBR 00119 Es PDFDocument23 pagesMBR 00119 Es PDFVik TulaNo ratings yet
- Catálogo EPY Febrero 2021Document83 pagesCatálogo EPY Febrero 2021jeshuann100% (1)
- Monitorizacion Mediante Raspberry Pi Domotico Corriente ACDocument114 pagesMonitorizacion Mediante Raspberry Pi Domotico Corriente ACRolando VlNo ratings yet
- Exposicion Memoria RamDocument33 pagesExposicion Memoria RamYeison IbarguenNo ratings yet
- El Robot Proton de ElektorDocument3 pagesEl Robot Proton de ElektorMoisesNo ratings yet
- Practica Centralita 3CX v15Document3 pagesPractica Centralita 3CX v15AntonAntonNo ratings yet
- App Inventor, Firebase y Nodemcu Echufe Que Activa Solo en Tarifa BarataDocument18 pagesApp Inventor, Firebase y Nodemcu Echufe Que Activa Solo en Tarifa BarataAntonio José Mancebo FunesNo ratings yet
- AIRBOX5 DatasheetDocument2 pagesAIRBOX5 DatasheetHector ChNo ratings yet
- Servidor de Streaming Con Unreal Media ServerDocument8 pagesServidor de Streaming Con Unreal Media ServerDaniel Moreno BarónNo ratings yet
- Lista de Distros LinuxDocument71 pagesLista de Distros LinuxIvan OrtizNo ratings yet
- Introducción A Unity v1.0 Por César GuerraDocument62 pagesIntroducción A Unity v1.0 Por César GuerraLuis OENo ratings yet
- MEDICION Y DESEMPEÑO Mac Os XDocument7 pagesMEDICION Y DESEMPEÑO Mac Os XRicardo Lopez GutierezNo ratings yet
- Comunicación OPC Con Un PLC Logix5000 Desde VisualDocument13 pagesComunicación OPC Con Un PLC Logix5000 Desde Visualdavid_diaz_s0% (1)
- Solución Problemas 2 SBM Sistemas Basados en Microprocesadores UAM 2doDocument40 pagesSolución Problemas 2 SBM Sistemas Basados en Microprocesadores UAM 2doLex CalNo ratings yet
- Manual Arduino UbidotsDocument21 pagesManual Arduino Ubidotsmauricio alexander arias arancibiaNo ratings yet
- Hardware y SoftwareDocument13 pagesHardware y SoftwareJulian Gaston MongabureNo ratings yet
- Solución Problemas 3 SBM Sistemas Basados en Microprocesadores UAM 2doDocument12 pagesSolución Problemas 3 SBM Sistemas Basados en Microprocesadores UAM 2doLex CalNo ratings yet
- Ccna Itn Chp10Document37 pagesCcna Itn Chp10Steven TorresNo ratings yet
- Sistemas Embebidos FPGADocument91 pagesSistemas Embebidos FPGAcarlos.otiniano9811No ratings yet
- Sincronización de Gestores de Base de DatosDocument4 pagesSincronización de Gestores de Base de DatosglamaizveNo ratings yet
- Reglamento SumoDocument7 pagesReglamento SumoLuz 1No ratings yet
- Libro C#Document345 pagesLibro C#Solanyy Fernández100% (1)
- FlotasDocument6 pagesFlotasAlemamxNo ratings yet
- Control de Velocidad Con LabVIEW y Arduino - Docx (RESUMIDO)Document22 pagesControl de Velocidad Con LabVIEW y Arduino - Docx (RESUMIDO)Eugenio Puche SánchezNo ratings yet
- Laborda - Desarrollo de Un Nodo Inalámbrico de Bajo Consumo Basado en Técnicas de Iot para Monito...Document229 pagesLaborda - Desarrollo de Un Nodo Inalámbrico de Bajo Consumo Basado en Técnicas de Iot para Monito...Cristhian FradeNo ratings yet
- Equipo2 Ev4 IarDocument19 pagesEquipo2 Ev4 IarSalma RuízNo ratings yet
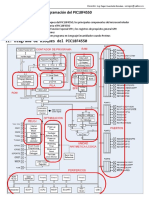
- P01 Modelo de Programación Del PIC18F4550Document14 pagesP01 Modelo de Programación Del PIC18F4550Fide Alvarado100% (1)
- Clase 20. Arduino SimulinkDocument9 pagesClase 20. Arduino SimulinkYayitaLeonaB.VanegasNo ratings yet
- Manual Aprendizaje Lenguaje CompletoDocument95 pagesManual Aprendizaje Lenguaje CompletoMARLENINo ratings yet
- Guia Practicas ArduinoDocument18 pagesGuia Practicas ArduinofannyNo ratings yet
- Clase Teclado e InterrupcionDocument12 pagesClase Teclado e InterrupcionMichael MartinezNo ratings yet
- 02 Introduccion Al Desarrollo de Aplicaciones MovilesDocument10 pages02 Introduccion Al Desarrollo de Aplicaciones MovilesKermit EscribanoNo ratings yet
- Optisystem DWDMDocument22 pagesOptisystem DWDMAngela CorderoNo ratings yet
- InformeDiseñoE IOT-BlynkDocument13 pagesInformeDiseñoE IOT-BlynkAlexander ValenciaNo ratings yet
- S01 S01-Material PDFDocument27 pagesS01 S01-Material PDFGiancarloFabianNo ratings yet
- BluetoothDocument7 pagesBluetoothseñoraNo ratings yet
- Código de Telegram Esp32Document5 pagesCódigo de Telegram Esp32Carlos Cordero PérezNo ratings yet
- ¿Dónde Está Mi Coche? - Aprende App InventorDocument6 pages¿Dónde Está Mi Coche? - Aprende App InventorOscar MandujanoNo ratings yet
- Emsamblaje de ComputadoraDocument23 pagesEmsamblaje de ComputadoraNino ArriagaNo ratings yet
- Manual Linuxcnc EsDocument17 pagesManual Linuxcnc EsDani Luggren0% (1)
- Proyecto Brazo Robotico Con ElectroimanDocument8 pagesProyecto Brazo Robotico Con Electroimanjohn caceresNo ratings yet
- Instalación y Configuracion de Rockola Central VistaDocument50 pagesInstalación y Configuracion de Rockola Central VistaWilliam Orlando Acuña AcuñaNo ratings yet
- Manual de ProteusDocument10 pagesManual de ProteusBruno CastillejosNo ratings yet
- Avanzado - Modulo I ArduinoDocument51 pagesAvanzado - Modulo I ArduinoFranklinrivaszelayaNo ratings yet
- Uso Del Puerto Usbuniversal Serial Bus de La PC Nov 09 2011Document72 pagesUso Del Puerto Usbuniversal Serial Bus de La PC Nov 09 2011Marcos EstecheNo ratings yet
- Conexion CDC PIC LabViewDocument15 pagesConexion CDC PIC LabViewJonatan Yam100% (1)
- Anatomia Del RobotDocument4 pagesAnatomia Del Robotvodkaytequila1100% (1)
- Robotica Tarea 2 Aportes Significativos 123Document25 pagesRobotica Tarea 2 Aportes Significativos 123Samuel GutierrezNo ratings yet
- Cuestionario Cinemática de RobotsDocument9 pagesCuestionario Cinemática de RobotsAgustin Colque QuirogaNo ratings yet
- Proyecto Con CimDocument17 pagesProyecto Con CimCarlos Alejandro Galvez ChicchonNo ratings yet
- Robotica IndustrialDocument19 pagesRobotica Industrialrivac85No ratings yet
- Guía Lección #1 PDFDocument4 pagesGuía Lección #1 PDFJocsmer SaldañaNo ratings yet
- Convocatoria para Docentes Del Centro de Informática y Telecomunicaciones de La Universidad Nacional de Tumbes - Citunt PDFDocument8 pagesConvocatoria para Docentes Del Centro de Informática y Telecomunicaciones de La Universidad Nacional de Tumbes - Citunt PDFJocsmer SaldañaNo ratings yet
- Currìculum Vitae (Sabado)Document2 pagesCurrìculum Vitae (Sabado)Jocsmer SaldañaNo ratings yet
- Convocatoria para Docentes Del Centro de Informática y Telecomunicaciones de La Universidad Nacional de Tumbes - Citunt PDFDocument8 pagesConvocatoria para Docentes Del Centro de Informática y Telecomunicaciones de La Universidad Nacional de Tumbes - Citunt PDFJocsmer SaldañaNo ratings yet
- Jahir 33Document8 pagesJahir 33Jocsmer SaldañaNo ratings yet
- Lession 1 Level SentencesDocument4 pagesLession 1 Level Sentencespaola meza maldonadoNo ratings yet
- Generos Discursivos DeyvisDocument2 pagesGeneros Discursivos DeyvisJocsmer SaldañaNo ratings yet
- ProcesoDocument1 pageProcesoJocsmer SaldañaNo ratings yet
- Trabajo AbsDocument7 pagesTrabajo AbsJocsmer SaldañaNo ratings yet
- Deiseño de Un Modulo de EncedidoDocument4 pagesDeiseño de Un Modulo de EncedidoJocsmer SaldañaNo ratings yet
- Estuardo MMMMDocument2 pagesEstuardo MMMMJocsmer SaldañaNo ratings yet
- Aire Acondicionado S1Document5 pagesAire Acondicionado S1Jocsmer SaldañaNo ratings yet
- Aire Acondicionado S1Document5 pagesAire Acondicionado S1Jocsmer SaldañaNo ratings yet
- Inyeccion DieselDocument8 pagesInyeccion DieselJocsmer SaldañaNo ratings yet
- Gestion Del Talento Humano 2Document2 pagesGestion Del Talento Humano 2Jocsmer SaldañaNo ratings yet
- Alquiler de Cuarto Resibo 2 3Document1 pageAlquiler de Cuarto Resibo 2 3Jocsmer SaldañaNo ratings yet
- Deiseño de Un Modulo de EncedidoDocument4 pagesDeiseño de Un Modulo de EncedidoJocsmer SaldañaNo ratings yet
- Deiseño de Un Modulo de EncedidoDocument4 pagesDeiseño de Un Modulo de EncedidoJocsmer SaldañaNo ratings yet
- Capitulo Viii SagaDocument2 pagesCapitulo Viii SagaJocsmer SaldañaNo ratings yet
- Informe de Inyeccion DieselDocument2 pagesInforme de Inyeccion DieselJocsmer SaldañaNo ratings yet
- Estuardo MMMMDocument2 pagesEstuardo MMMMJocsmer SaldañaNo ratings yet
- Tipos de OrganizacionesDocument7 pagesTipos de OrganizacionesJocsmer SaldañaNo ratings yet
- JAHIRDocument10 pagesJAHIRJocsmer SaldañaNo ratings yet
- ImerDocument2 pagesImerJocsmer SaldañaNo ratings yet
- Edward ScoyDocument4 pagesEdward ScoyJocsmer SaldañaNo ratings yet
- Gestion de Cambio InformeDocument5 pagesGestion de Cambio InformeJocsmer SaldañaNo ratings yet
- Capitulo Viii SagaDocument2 pagesCapitulo Viii SagaJocsmer SaldañaNo ratings yet
- Dbujos de AlarmaDocument1 pageDbujos de AlarmaJocsmer SaldañaNo ratings yet
- 2 Parcial de Gestion de MantenimeintoDocument5 pages2 Parcial de Gestion de MantenimeintoJocsmer SaldañaNo ratings yet
- OXANIONEDocument4 pagesOXANIONEYamunaque Piscoya ElianaNo ratings yet
- InocuidadDocument2 pagesInocuidadCarlos Daniel Mamani CastañedaNo ratings yet
- Caracterización de YogurtDocument63 pagesCaracterización de YogurtHellenzitah Guarniz JulcaNo ratings yet
- Clasificación de BienesDocument78 pagesClasificación de BienesFloreria Elisa 01No ratings yet
- Temario MetodologiaDocument11 pagesTemario MetodologiaAlvarado González Paula TeresaNo ratings yet
- El Gato Medicina Clínica y Manejo Parte 3Document50 pagesEl Gato Medicina Clínica y Manejo Parte 3Raul Hernandez SotoNo ratings yet
- Automatización XDocument21 pagesAutomatización XGiovana Lazo seguilNo ratings yet
- Una Sarta de Mentiras - McCaughrean, GeraldineDocument236 pagesUna Sarta de Mentiras - McCaughrean, Geraldinehector100% (1)
- 10 Frases de Paulo Coelho Que Nadie Cree Que Fueran de ÉlDocument3 pages10 Frases de Paulo Coelho Que Nadie Cree Que Fueran de ÉlIraida Maria Marin RodriguezNo ratings yet
- 18 Julio 2013Document15 pages18 Julio 2013LCMDPNo ratings yet
- No 185 La Boca Del InfiernoDocument60 pagesNo 185 La Boca Del InfiernoAlex MoragaNo ratings yet
- La Vida en Las AldeasDocument9 pagesLa Vida en Las Aldeaspancho riversNo ratings yet
- Pena de Muerte en Tomás de AquinoDocument5 pagesPena de Muerte en Tomás de AquinoAlvarado JosuéNo ratings yet
- Cuenca Del Lago de MaracaiboDocument8 pagesCuenca Del Lago de Maracaibokenner paterninaNo ratings yet
- Laboratorio 5Document21 pagesLaboratorio 5Benny Gomez C0% (1)
- Presa de TierraDocument25 pagesPresa de TierraTika Cuellar Minauro100% (1)
- C V PJHMDocument4 pagesC V PJHMJose MamaniNo ratings yet
- Ejercicios MC Cabe Enthile. Poncho SavaritDocument15 pagesEjercicios MC Cabe Enthile. Poncho SavaritStefano Gomez LlimpeNo ratings yet
- Seguridad Activa y PasivaDocument2 pagesSeguridad Activa y PasivaJhonnatan AldasNo ratings yet
- Ritual de Union Con Santa Barbara y Varios..Document1 pageRitual de Union Con Santa Barbara y Varios..mumusalazarNo ratings yet
- Tema Tesis UdchDocument16 pagesTema Tesis UdchJoseSilvaNo ratings yet
- F004-P006-GFPI Guia de Aprendizaje AforoDocument13 pagesF004-P006-GFPI Guia de Aprendizaje Afororuben furnielesNo ratings yet
- CAT 12 2022 - EcuadorDocument60 pagesCAT 12 2022 - EcuadorEsthela TelloNo ratings yet
- CerealesDocument35 pagesCerealesCESIA RAQUEL AVITIA CANONo ratings yet
- Chevrolet-Spark 2013 ES-MX MX 7d2421337eDocument202 pagesChevrolet-Spark 2013 ES-MX MX 7d2421337eIsmael Elias Rondan MamaniNo ratings yet
- Escala de HamiltonDocument4 pagesEscala de HamiltonLolo HerediaNo ratings yet
- Clasificación de Lubricantes para VehiculosDocument3 pagesClasificación de Lubricantes para VehiculosWaltHer OsoRioNo ratings yet
- 18 Jeremias El Corazon EnganosoDocument53 pages18 Jeremias El Corazon EnganosoJ Daniel Colmenares MartinezNo ratings yet
- MAPODocument4 pagesMAPOjoha ValdezNo ratings yet
- El BuqueDocument6 pagesEl BuqueLeonarth LionNo ratings yet
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másFrom EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másRating: 2.5 out of 5 stars2.5/5 (3)
- La causa raiz de los accidentes: Historias de accidentes en la industriaFrom EverandLa causa raiz de los accidentes: Historias de accidentes en la industriaRating: 5 out of 5 stars5/5 (1)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadFrom EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadRating: 5 out of 5 stars5/5 (1)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónFrom EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónRating: 5 out of 5 stars5/5 (1)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.From EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Rating: 5 out of 5 stars5/5 (1)
- Influencia. La psicología de la persuasiónFrom EverandInfluencia. La psicología de la persuasiónRating: 4.5 out of 5 stars4.5/5 (14)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.From EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Rating: 4 out of 5 stars4/5 (51)
- EL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialFrom EverandEL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialRating: 4.5 out of 5 stars4.5/5 (7)
- 7 tendencias digitales que cambiarán el mundoFrom Everand7 tendencias digitales que cambiarán el mundoRating: 4.5 out of 5 stars4.5/5 (87)
- Guía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaFrom EverandGuía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaRating: 3.5 out of 5 stars3.5/5 (2)
- Manual técnico para la interpretación de análisis de suelos y fertilización de cultivosFrom EverandManual técnico para la interpretación de análisis de suelos y fertilización de cultivosRating: 4 out of 5 stars4/5 (1)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenFrom EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenRating: 5 out of 5 stars5/5 (8)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialFrom EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialRating: 4.5 out of 5 stars4.5/5 (10)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasFrom EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasRating: 4.5 out of 5 stars4.5/5 (14)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...From EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Rating: 5 out of 5 stars5/5 (4)
- Inteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaFrom EverandInteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaAna Isabel Sánchez DíezRating: 4 out of 5 stars4/5 (3)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaFrom EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaRating: 4.5 out of 5 stars4.5/5 (117)
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialFrom EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialRating: 4.5 out of 5 stars4.5/5 (11)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesFrom EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesRating: 4.5 out of 5 stars4.5/5 (2)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteFrom EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteRating: 1 out of 5 stars1/5 (1)
- El mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosFrom EverandEl mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosRating: 5 out of 5 stars5/5 (2)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosFrom EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosRating: 4 out of 5 stars4/5 (16)