You might also like
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Chapter 4Document35 pagesChapter 4S S S REDDYNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- MCQ in Thermodynamics 000ANSDocument33 pagesMCQ in Thermodynamics 000ANSjenny92% (13)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Raw 3Document41 pagesRaw 3yarima1762No ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Department of Computing Adama Science and Technology UniversityDocument31 pagesDepartment of Computing Adama Science and Technology Universitybirhanu berihunNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Individual Assignment #1 - Network Diagram ExerciseDocument8 pagesIndividual Assignment #1 - Network Diagram ExerciseveenajkumarNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- GOAL Oriented Requirements Engineering - Lapouchnian-Depth PDFDocument32 pagesGOAL Oriented Requirements Engineering - Lapouchnian-Depth PDFTALALQUIDERNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- BME Assignment 3 2021-22 - Tri-IDocument2 pagesBME Assignment 3 2021-22 - Tri-IAjuba AbujaNo ratings yet
- DSP Lab 4Document3 pagesDSP Lab 4Shivanshu TrivediNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- 'AI & Machine Vision Coursework Implementation of Deep Learning For Classification of Natural ImagesDocument13 pages'AI & Machine Vision Coursework Implementation of Deep Learning For Classification of Natural ImagesResearchpro GlobalNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Thermodynamic Properties, Equations of State, Methods Used To Describe and Predict Phase EquilibriaDocument20 pagesThermodynamic Properties, Equations of State, Methods Used To Describe and Predict Phase EquilibriaanisfathimaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Tutorial Math Deep Learning 2018 PDFDocument103 pagesTutorial Math Deep Learning 2018 PDFElnur ƏhmədzadəNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- ISTQB-Chapter 4-Test Design TechniquesDocument19 pagesISTQB-Chapter 4-Test Design TechniquesVikas AgrawalNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Human Ecology ReviewDocument1 pageHuman Ecology ReviewfiqriNo ratings yet
- 2-B Human Trafficking in The Modern WorldDocument113 pages2-B Human Trafficking in The Modern WorldKarl ButacNo ratings yet
- CS203 - Advanced Computer Architecture: Dependability & ReliabilityDocument17 pagesCS203 - Advanced Computer Architecture: Dependability & Reliabilityanon_240227768No ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- c11 Solutions v12Document216 pagesc11 Solutions v12김서진No ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Heat Fusion of Ice ReportDocument8 pagesHeat Fusion of Ice Reporthasifah abdazizNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Three Term ControlDocument12 pagesThree Term Controlpop3alyNo ratings yet
- EEE 2297 (Signals and Linear Systems) : State Variable-Basic ConceptDocument17 pagesEEE 2297 (Signals and Linear Systems) : State Variable-Basic ConceptRaju AhmedNo ratings yet
- RequirementsEngineering College3 v3.0Document46 pagesRequirementsEngineering College3 v3.0MAVA JAVANo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- CostingDocument448 pagesCostingpal100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Linear Programming Is The Simplest Way of Optimizing A ProblemDocument13 pagesLinear Programming Is The Simplest Way of Optimizing A Problemgssgopi9_389290943No ratings yet
- Unit 2Document51 pagesUnit 2srivatsaNo ratings yet
- Design of PID Controller For Level LoopDocument9 pagesDesign of PID Controller For Level LoopFerry DewantoNo ratings yet
- Auto-2 Cs2018-2019 Validated PHDocument2 pagesAuto-2 Cs2018-2019 Validated PHmanuel tamondongNo ratings yet
- Chapter 6 - Pole - Placement - N - PIDDocument89 pagesChapter 6 - Pole - Placement - N - PIDSaathiran MarshallNo ratings yet
- Cylinder Pressure Closed Loop ControlDocument11 pagesCylinder Pressure Closed Loop ControlkhalihneNo ratings yet
- Thermo 5th Chap07 P001Document25 pagesThermo 5th Chap07 P001Rodrigo Andre Zuniga JuarezNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
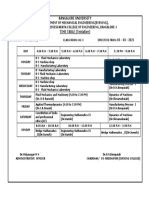
- Bangalore University TIME TABLE (Tentative)Document1 pageBangalore University TIME TABLE (Tentative)Manjot SinghNo ratings yet
- Presentation: Optimal Power Management For Server Farm To Support Green ComputingDocument21 pagesPresentation: Optimal Power Management For Server Farm To Support Green ComputingSivadon ChaisiriNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)