You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Advt No.16-2021 01-06-2021 X7 VersionDocument1 pageAdvt No.16-2021 01-06-2021 X7 Versionimran khanNo ratings yet
- Advt No 10-2021Document1 pageAdvt No 10-2021Ruqia KhanNo ratings yet
- Jawad Hussain: Universiti Teknikal Malaysia Melaka, Malaysia Technology, Lahore, Pakistan of IT, Lahore, PakistanDocument2 pagesJawad Hussain: Universiti Teknikal Malaysia Melaka, Malaysia Technology, Lahore, Pakistan of IT, Lahore, PakistanXahid YousafNo ratings yet
- Course Folders Fall 2019 EEDocument2 pagesCourse Folders Fall 2019 EEXahid YousafNo ratings yet
- Waseem AkramDocument1 pageWaseem AkramXahid YousafNo ratings yet
- 2019 Dec. EE403-C - Ktu Qbank - 2Document2 pages2019 Dec. EE403-C - Ktu Qbank - 2Xahid YousafNo ratings yet
- Muhammad Awais MahboobDocument4 pagesMuhammad Awais MahboobXahid YousafNo ratings yet
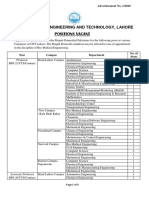
- Positions Vacant: University of Engineering and Technology, LahoreDocument4 pagesPositions Vacant: University of Engineering and Technology, LahoreXahid YousafNo ratings yet
- Advertisement (PPP Node)Document1 pageAdvertisement (PPP Node)Xahid YousafNo ratings yet
- 5 - IshfaqDocument1 page5 - IshfaqXahid YousafNo ratings yet
- Summary of The Simulation:: Name: Tayyab Mansoor Ch. SAP: 24166Document31 pagesSummary of The Simulation:: Name: Tayyab Mansoor Ch. SAP: 24166Xahid YousafNo ratings yet
- Controller of 6 DOF Robotic Arm: Group MembersDocument23 pagesController of 6 DOF Robotic Arm: Group MembersJam Asif ManzoorNo ratings yet
- Voice Recognition Application Based Home Automation System With People CounterDocument5 pagesVoice Recognition Application Based Home Automation System With People CounterXahid YousafNo ratings yet
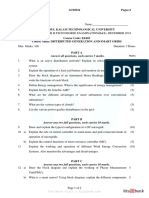
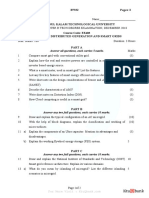
- EE403 Distributed Generation and Smart Grids: Answer All Questions, Each Carries 5 MarksDocument2 pagesEE403 Distributed Generation and Smart Grids: Answer All Questions, Each Carries 5 MarksXahid YousafNo ratings yet
- Challan FormDocument1 pageChallan FormFurqan ButtNo ratings yet
- Advt No.34-2020 13-11-2020 X7 VersionDocument1 pageAdvt No.34-2020 13-11-2020 X7 VersionSheikh JunaidNo ratings yet
- Addendum (Positions Vacant) : University of Engineering and Technology, LahoreDocument2 pagesAddendum (Positions Vacant) : University of Engineering and Technology, LahoreXahid YousafNo ratings yet
- Ssc-Jen 2013: (Question Paper With Solutions)Document31 pagesSsc-Jen 2013: (Question Paper With Solutions)Xahid YousafNo ratings yet
- Distributed Generation in Power Systems: An Overview and Key IssuesDocument9 pagesDistributed Generation in Power Systems: An Overview and Key IssuesXahid YousafNo ratings yet
- Transformer Overloading Control by Controlling The Operational-Modes of High-Power ConvertersDocument1 pageTransformer Overloading Control by Controlling The Operational-Modes of High-Power ConvertersXahid YousafNo ratings yet
- P1 Electric VDocument1 pageP1 Electric VXahid YousafNo ratings yet
- A Measurement Study of Cooperative Network On Wimax Technology Using Bicm LDPC With Iterative Decoding TechniqueDocument1 pageA Measurement Study of Cooperative Network On Wimax Technology Using Bicm LDPC With Iterative Decoding TechniqueXahid YousafNo ratings yet
- Energies 12 00553Document12 pagesEnergies 12 00553Xahid YousafNo ratings yet
- Inter-Area Oscillation Damping and Voltage Regulation by Using UPFC For 500 KV Transmission NetworkDocument5 pagesInter-Area Oscillation Damping and Voltage Regulation by Using UPFC For 500 KV Transmission NetworkXahid YousafNo ratings yet
- P 1 IEEE AccessDocument1 pageP 1 IEEE AccessXahid YousafNo ratings yet
- Thermocouple Gauge vs Pirani Gauge: Which is BestDocument6 pagesThermocouple Gauge vs Pirani Gauge: Which is BestXahid YousafNo ratings yet
- P1 Fractional ConfDocument1 pageP1 Fractional ConfXahid YousafNo ratings yet
- P 1 Aims EnergyDocument1 pageP 1 Aims EnergyXahid YousafNo ratings yet
- The National Academies PressDocument98 pagesThe National Academies PressXahid YousafNo ratings yet
- Probset 2 SolnDocument10 pagesProbset 2 SolnDominic MendozaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Signature RedactedDocument49 pagesSignature RedactedG Pavan KumarNo ratings yet
- Glazed Aluminum Curtain Walls (Thermawall SM 2600)Document12 pagesGlazed Aluminum Curtain Walls (Thermawall SM 2600)RsjBugtongNo ratings yet
- Carrefour-SA Shopping Center TurkeyDocument2 pagesCarrefour-SA Shopping Center TurkeyVineet JogalekarNo ratings yet
- Saikat SaraniDocument11 pagesSaikat SaraniPartha GangopadhyayNo ratings yet
- Modelling Urban Areas in Dam-Break Flood-Wave Numerical SimulationsDocument14 pagesModelling Urban Areas in Dam-Break Flood-Wave Numerical SimulationsDaru Nurisma PramuktiNo ratings yet
- Basic Simulation LabDocument69 pagesBasic Simulation LabkamalahasanmNo ratings yet
- Machine Design: The Hidden Cause ofDocument6 pagesMachine Design: The Hidden Cause ofbbmokshNo ratings yet
- Design of Masonry StructuresDocument10 pagesDesign of Masonry StructuresmuhammedNo ratings yet
- Strength of Materials 4th Ed by Ferdinand L Singer Andrew Pytel Www07MettkDocument287 pagesStrength of Materials 4th Ed by Ferdinand L Singer Andrew Pytel Www07Mettkluis morales100% (2)
- A Brief Overview of The Holographic TechnologyDocument5 pagesA Brief Overview of The Holographic TechnologyAltiel Ltd.No ratings yet
- 1981 - Leeper - Wet Cooling Tower - Rule of Thumb Design and SimulationDocument32 pages1981 - Leeper - Wet Cooling Tower - Rule of Thumb Design and SimulationGuilherme Venturi RonchiNo ratings yet
- Fourier Series ApplicationDocument10 pagesFourier Series Application9th P/C completedNo ratings yet
- Section I: Logical Reasoning: Free ThrowsDocument7 pagesSection I: Logical Reasoning: Free ThrowsPuja AgarwalNo ratings yet
- Improve Steel Quality with Electromagnetic StirrersDocument4 pagesImprove Steel Quality with Electromagnetic Stirrerst_pradipNo ratings yet
- Energy in Somaliland Novia Thesis - Editing PDFDocument25 pagesEnergy in Somaliland Novia Thesis - Editing PDFAbdirahmanNo ratings yet
- Lab 6 SpectrophotometerDocument11 pagesLab 6 SpectrophotometerChing Wai YongNo ratings yet
- Brazilian Test Stress Field and Tensile Strength of Anisotropic Rocks Using An Analytical SolutioDocument14 pagesBrazilian Test Stress Field and Tensile Strength of Anisotropic Rocks Using An Analytical Solutiovinayak_katkarNo ratings yet
- Data Sheet Otdr Fho5000 enDocument2 pagesData Sheet Otdr Fho5000 enJulio RoDriguezNo ratings yet
- 2015-04-21 - 3 - LPE Firemans SyllabusDocument9 pages2015-04-21 - 3 - LPE Firemans SyllabusSumanNo ratings yet
- Measuring Elastic Modulus of Beams Using Deflection MethodDocument14 pagesMeasuring Elastic Modulus of Beams Using Deflection MethodHaziq PazliNo ratings yet
- 079322C Int MR LD Int 1543 0004 3427 01Document1 page079322C Int MR LD Int 1543 0004 3427 01bolat.kukuzovNo ratings yet
- Ordinary Differential EquationDocument20 pagesOrdinary Differential EquationRadeanindaNo ratings yet
- Rocket PropulsionDocument41 pagesRocket PropulsionV DhinakaranNo ratings yet
- Soil Nail Wall - Soil Nailing - Deep ExcavationDocument7 pagesSoil Nail Wall - Soil Nailing - Deep ExcavationAlok Mehta0% (1)
- Practice Questions 2014Document5 pagesPractice Questions 2014Ruqiyya IsrafilovaNo ratings yet
- C-30 Concrete Mix Design RatiosDocument5 pagesC-30 Concrete Mix Design RatiosAtm Tjah Radix LoegoeNo ratings yet
- Bosch L Jetronic Injection Technical Instructions PDFDocument40 pagesBosch L Jetronic Injection Technical Instructions PDFjorge Angel LopeNo ratings yet
- Fourier Transform and Its Medical ApplicationDocument55 pagesFourier Transform and Its Medical Applicationadriveros100% (1)
- WISDM-dataset-description 2Document5 pagesWISDM-dataset-description 2yuliasihkripsianditaNo ratings yet
- Topic 4 - Probability (Old Notes)Document22 pagesTopic 4 - Probability (Old Notes)Pradeep100% (1)