You might also like
- STC 1515Document22 pagesSTC 1515bladeyus1No ratings yet
- International Journal of Engineering and Science Invention (IJESI)Document10 pagesInternational Journal of Engineering and Science Invention (IJESI)inventionjournalsNo ratings yet
- Denavit Hartenberg MethodsDocument42 pagesDenavit Hartenberg MethodsShyamalNo ratings yet
- A Robust Control Strategy For UPFC To Improve Transient Stability Using Fuzzy Bang-Bang ControlDocument5 pagesA Robust Control Strategy For UPFC To Improve Transient Stability Using Fuzzy Bang-Bang ControlXahid YousafNo ratings yet
- 32.performance Analysis - FullDocument10 pages32.performance Analysis - FullyeisongarcesNo ratings yet
- 1 s2.0 S0019057813000608 Main PDFDocument6 pages1 s2.0 S0019057813000608 Main PDFsethukumarkNo ratings yet
- JVE HybridDocument17 pagesJVE HybridatifkhushnoodNo ratings yet
- Grid-Tie Three-Phase Inverter With Active and Reactive Power Flow Control CapabilityDocument9 pagesGrid-Tie Three-Phase Inverter With Active and Reactive Power Flow Control CapabilityHoàngNguyễnNo ratings yet
- Wind Turbine Control With Multiple Model Predictive ControlDocument6 pagesWind Turbine Control With Multiple Model Predictive ControlAngelo Sanchez IafantiNo ratings yet
- Feedback Linearization of Active Magnetic Bearings Current-Mode Implementation (Min Chen and Carl R. Knospe, Member, IEEE)Document8 pagesFeedback Linearization of Active Magnetic Bearings Current-Mode Implementation (Min Chen and Carl R. Knospe, Member, IEEE)Vu MinhNo ratings yet
- Transient Stability Performance Analysis of Power System Using Facts DevicesDocument7 pagesTransient Stability Performance Analysis of Power System Using Facts Devicesrasim_m1146No ratings yet
- Application of Multiple-Model Adaptive ControlDocument10 pagesApplication of Multiple-Model Adaptive ControlRabbuni GangavarapuNo ratings yet
- Simulation of D-Q Control System For A Unified Power Flow ControllerDocument10 pagesSimulation of D-Q Control System For A Unified Power Flow ControllerSyed Faizan AliNo ratings yet
- Docs 3396757885dc8d92655bafDocument11 pagesDocs 3396757885dc8d92655bafRival PratamaNo ratings yet
- Direct Active and Reactive Power Control of Single-Phase Grid-Tie ConvertersDocument7 pagesDirect Active and Reactive Power Control of Single-Phase Grid-Tie ConvertersHalima TamboNo ratings yet
- 0 PepeDocument7 pages0 PepeVaisakh_k5683No ratings yet
- Velocity Regulation in Switched Reluctance Motors Under Magnetic Flux Saturation ConditionsDocument14 pagesVelocity Regulation in Switched Reluctance Motors Under Magnetic Flux Saturation ConditionsJorge Orrante SakanassiNo ratings yet
- Iosr JeeeDocument12 pagesIosr JeeekiranNo ratings yet
- Bacterial Foraging Optimization Based Load Frequency Control of Interconnected Power Systems With Static Synchronous Series CompensatorDocument7 pagesBacterial Foraging Optimization Based Load Frequency Control of Interconnected Power Systems With Static Synchronous Series CompensatorSahitya16No ratings yet
- Force-Impedance Control: A New Control Strategy of Robotic ManipulatorsDocument12 pagesForce-Impedance Control: A New Control Strategy of Robotic ManipulatorscmkorpelaNo ratings yet
- Improvement of Power System Transient Stability Using An Intelligent Control MethodDocument9 pagesImprovement of Power System Transient Stability Using An Intelligent Control MethodKhubaib AhmedNo ratings yet
- Position Control Performance Improvement of DTC-SVM For An Induction Motor: Application To Photovoltaic Panel PositionDocument14 pagesPosition Control Performance Improvement of DTC-SVM For An Induction Motor: Application To Photovoltaic Panel PositionأسامةبوعزيزNo ratings yet
- A Control of MR Damper Using Feed-Forward Neural Network Without Force SensorDocument4 pagesA Control of MR Damper Using Feed-Forward Neural Network Without Force SensorhafizalNo ratings yet
- 2017 - Finite-Control Set MPC Method For Tourque Control of IM Using A State Tracking Cost IndexDocument13 pages2017 - Finite-Control Set MPC Method For Tourque Control of IM Using A State Tracking Cost IndexjemmyducNo ratings yet
- IOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringDocument11 pagesIOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- UPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourDocument8 pagesUPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourMmillion AlemayehuNo ratings yet
- Upfc PlacementDocument0 pagesUpfc PlacementVamsi KumarNo ratings yet
- Load Frequency Control in Single Area System Using Model Predictive Control and Linear Quadratic Gaussian TechniquesDocument4 pagesLoad Frequency Control in Single Area System Using Model Predictive Control and Linear Quadratic Gaussian TechniquesAkshay RohanNo ratings yet
- A Benchmark System For Digital Time-Domain Simulation of An Active Power FilterDocument8 pagesA Benchmark System For Digital Time-Domain Simulation of An Active Power FilterAndreeaNo ratings yet
- Mechanical Systems and Signal Processing: H. Metered, P. Bonello, S.O. OyadijiDocument19 pagesMechanical Systems and Signal Processing: H. Metered, P. Bonello, S.O. Oyadijiajd.nanthakumarNo ratings yet
- Powers Ys 800Document8 pagesPowers Ys 800makroumNo ratings yet
- Optimal Transformer Tap Changing SettingDocument7 pagesOptimal Transformer Tap Changing Settingtrust4joshNo ratings yet
- VFTDocument5 pagesVFTJawad IqbalNo ratings yet
- Improved System OperationDocument6 pagesImproved System OperationRafi MuhammedNo ratings yet
- Paper Marnetic2013Document14 pagesPaper Marnetic2013Renan SiqueiraNo ratings yet
- An Improved SMC Control Strategies For PMSG Based WECSDocument10 pagesAn Improved SMC Control Strategies For PMSG Based WECSGIRISHNo ratings yet
- A Robust Two-Degree-of-Freedom Control Strategy For An Islanded MicrogridDocument9 pagesA Robust Two-Degree-of-Freedom Control Strategy For An Islanded MicrogridManohar ChamanaNo ratings yet
- 1 s2.0 S037877962200164X MainDocument12 pages1 s2.0 S037877962200164X MainFernando OrnelasNo ratings yet
- Juan Manuel Mauricio 2008Document11 pagesJuan Manuel Mauricio 2008oualid zouggarNo ratings yet
- Modeling and Simulation of SRF and P-Q Based Control DstatcomDocument7 pagesModeling and Simulation of SRF and P-Q Based Control DstatcomIJERDNo ratings yet
- Archive of SID: Dynamic Controllers Design For STATCOMDocument7 pagesArchive of SID: Dynamic Controllers Design For STATCOMRajaavikhram YohanandhanNo ratings yet
- Adaptive Theory-Based Improved Linear Sinusoidal Tracer Control Algorithm For DSTATCOMDocument11 pagesAdaptive Theory-Based Improved Linear Sinusoidal Tracer Control Algorithm For DSTATCOMAmmuRaNo ratings yet
- Power Flow Control of Power Systems Using UPFC Based On Adaptive Neuro FuzzyDocument6 pagesPower Flow Control of Power Systems Using UPFC Based On Adaptive Neuro FuzzyMichael KristiantoNo ratings yet
- Load Frequency Control in Power System: Md. Al-Amin Sarker and A K M Kamrul HasanDocument8 pagesLoad Frequency Control in Power System: Md. Al-Amin Sarker and A K M Kamrul Hasanmasoud aliNo ratings yet
- Zeng (1997) An Overview of Robot Force ControlDocument10 pagesZeng (1997) An Overview of Robot Force ControloliveirarogerioNo ratings yet
- Predictive Current Trajectory Control For PMSM atDocument10 pagesPredictive Current Trajectory Control For PMSM atsurya bobbiliNo ratings yet
- Improvement of Transient Stability Using Fuzzy Logic Controlled SMES in MatlabDocument6 pagesImprovement of Transient Stability Using Fuzzy Logic Controlled SMES in Matlababera alemayehuNo ratings yet
- 244 1 AhmedSalmanDocument8 pages244 1 AhmedSalmanSalman AhmedNo ratings yet
- Upfc PDFDocument5 pagesUpfc PDFHarish KumarNo ratings yet
- Current Mode Control of A Solar Inverter With MPPT ADOPTIVE AlgorithmDocument7 pagesCurrent Mode Control of A Solar Inverter With MPPT ADOPTIVE AlgorithmAnonymous afzpkOo3No ratings yet
- Voltage/Pitch Control For Maximization and Regulation of Active/Reactive Powers in Wind Turbines With UncertaintiesDocument10 pagesVoltage/Pitch Control For Maximization and Regulation of Active/Reactive Powers in Wind Turbines With UncertaintiesKeyur PatelNo ratings yet
- Projection-Based Force Reflection Algorithm For Stable Bilateral Teleoperation Over NetworksDocument6 pagesProjection-Based Force Reflection Algorithm For Stable Bilateral Teleoperation Over Networkssamim_khNo ratings yet
- Multi-Step Predictive Current Control For NPC GridDocument10 pagesMulti-Step Predictive Current Control For NPC GridthinhNo ratings yet
- Matlab & Simulink Simulation With FPGA-Based Implementation Sliding Mode Control of A Permanent Magnet Synchronous Machine DriveDocument12 pagesMatlab & Simulink Simulation With FPGA-Based Implementation Sliding Mode Control of A Permanent Magnet Synchronous Machine DriveraghuaadsNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Structural Control Systems For Base Isolated BuildingsDocument10 pagesStructural Control Systems For Base Isolated BuildingsalistuguiNo ratings yet
- Design of Model Predictive Controller (MPC) For Load Frequency Control (LFC) in An Interconnected Power SystemDocument9 pagesDesign of Model Predictive Controller (MPC) For Load Frequency Control (LFC) in An Interconnected Power SystemAmberMeerabNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Energetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationFrom EverandEnergetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- MR - Mentoring EE Educators Towards PEEEngr. Cirilo Calibjo Nov. 27 2015Document74 pagesMR - Mentoring EE Educators Towards PEEEngr. Cirilo Calibjo Nov. 27 2015ramelNo ratings yet
- Natural Science Tech Matter Materials Processing Mat Processed MaterialsDocument8 pagesNatural Science Tech Matter Materials Processing Mat Processed MaterialsRaeesa SNo ratings yet
- ROLAN BART Zadovoljstvo U TekstuDocument56 pagesROLAN BART Zadovoljstvo U Tekstujokokokl100% (18)
- Danik Bhaskar Jaipur 05-24-2014Document28 pagesDanik Bhaskar Jaipur 05-24-2014bhaskar_newsNo ratings yet
- Image Filtering: Low and High FrequencyDocument5 pagesImage Filtering: Low and High FrequencyvijayNo ratings yet
- International Standard: Electric Vehicle Conductive Charging System - General RequirementsDocument7 pagesInternational Standard: Electric Vehicle Conductive Charging System - General Requirementskrishna chaitanyaNo ratings yet
- 1.draw The Circuit Diagram of A Mod-16 Asynchronous Counter and Explain Its Working WithDocument4 pages1.draw The Circuit Diagram of A Mod-16 Asynchronous Counter and Explain Its Working WithRajeshwari SNo ratings yet
- 1977 The Reactive Agility TestDocument6 pages1977 The Reactive Agility TestJessica Sepúlveda SalasNo ratings yet
- Bushman 2005Document8 pagesBushman 2005SOULAIMANE EZZOUINENo ratings yet
- Chapter 1 (Marketing Updated)Document9 pagesChapter 1 (Marketing Updated)i211416 Shizza KianiNo ratings yet
- Performance of A Load-Immune Classifier For Robust Identification of Minor Faults in Induction Motor Stator WindingDocument12 pagesPerformance of A Load-Immune Classifier For Robust Identification of Minor Faults in Induction Motor Stator Windingm.ebrahim moazzenNo ratings yet
- 34630.Seneca-Resume Writing Guide PDFDocument8 pages34630.Seneca-Resume Writing Guide PDFfiq_hugo319No ratings yet
- Flutter WidgetsDocument43 pagesFlutter WidgetsSangakkara WarriorsNo ratings yet
- Lorma Scope of WorkDocument2 pagesLorma Scope of WorkJb TiscubNo ratings yet
- About The ProjectDocument5 pagesAbout The Projectanand kumarNo ratings yet
- Classification of Heat ExchangersDocument12 pagesClassification of Heat Exchangersvishal samundreNo ratings yet
- The Old Ossetic Inscription From The River Zelenčuk,: Achtung!Document4 pagesThe Old Ossetic Inscription From The River Zelenčuk,: Achtung!gippertNo ratings yet
- Master SteelDocument5,118 pagesMaster Steelsabiutayo100% (3)
- Lesson 15 Validity of Measurement and Reliability PDFDocument3 pagesLesson 15 Validity of Measurement and Reliability PDFMarkChristianRobleAlmazanNo ratings yet
- Bicycle: From Wikipedia, The Free EncyclopediaDocument17 pagesBicycle: From Wikipedia, The Free Encyclopedialunwen100% (1)
- SQL Webinar FinalDocument21 pagesSQL Webinar FinalYaswanth ReddyNo ratings yet
- Education Expo 2021Document8 pagesEducation Expo 2021MayurNo ratings yet
- Tests For Surface Wellheads and BOP Equipment Used in Operations On Land and Above Water LevelDocument6 pagesTests For Surface Wellheads and BOP Equipment Used in Operations On Land and Above Water Levelahmed121No ratings yet
- Demographics Data Table: Lesson 1: Step 1Document3 pagesDemographics Data Table: Lesson 1: Step 1Julia AbreuNo ratings yet
- The Cost of Information Security Management in Offshore SMB ICT CompaniesDocument9 pagesThe Cost of Information Security Management in Offshore SMB ICT CompaniesaxyyNo ratings yet
- TKL Pump - Data - SheetDocument1 pageTKL Pump - Data - Sheetธนาชัย เต็งจิรธนาภาNo ratings yet
- WellCAD Logs OverviewDocument9 pagesWellCAD Logs OverviewpankuNo ratings yet
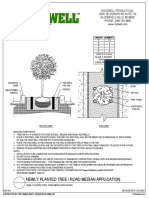
- Newly Planted Tree / Road Median ApplicationDocument1 pageNewly Planted Tree / Road Median ApplicationmooolkaNo ratings yet
- Fundamental Neuroscience For Basic and Clinical Applications 5Th Edition Duane E Haines Full ChapterDocument67 pagesFundamental Neuroscience For Basic and Clinical Applications 5Th Edition Duane E Haines Full Chaptermaxine.ferrell318100% (8)
- Psycopathy Case StudyDocument8 pagesPsycopathy Case StudyNayab NoorNo ratings yet