You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Jawad Hussain: Universiti Teknikal Malaysia Melaka, Malaysia Technology, Lahore, Pakistan of IT, Lahore, PakistanDocument2 pagesJawad Hussain: Universiti Teknikal Malaysia Melaka, Malaysia Technology, Lahore, Pakistan of IT, Lahore, PakistanXahid YousafNo ratings yet
- Advt No 10-2021Document1 pageAdvt No 10-2021Ruqia KhanNo ratings yet
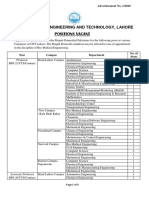
- Positions Vacant: University of Engineering and Technology, LahoreDocument4 pagesPositions Vacant: University of Engineering and Technology, LahoreXahid YousafNo ratings yet
- Advt No.16-2021 01-06-2021 X7 VersionDocument1 pageAdvt No.16-2021 01-06-2021 X7 Versionimran khanNo ratings yet
- Advertisement (PPP Node)Document1 pageAdvertisement (PPP Node)Xahid YousafNo ratings yet
- Controller of 6 DOF Robotic Arm: Group MembersDocument23 pagesController of 6 DOF Robotic Arm: Group MembersJam Asif ManzoorNo ratings yet
- 5 - IshfaqDocument1 page5 - IshfaqXahid YousafNo ratings yet
- Waseem AkramDocument1 pageWaseem AkramXahid YousafNo ratings yet
- Muhammad Awais MahboobDocument4 pagesMuhammad Awais MahboobXahid YousafNo ratings yet
- Challan FormDocument1 pageChallan FormFurqan ButtNo ratings yet
- Summary of The Simulation:: Name: Tayyab Mansoor Ch. SAP: 24166Document31 pagesSummary of The Simulation:: Name: Tayyab Mansoor Ch. SAP: 24166Xahid YousafNo ratings yet
- Course Folders Fall 2019 EEDocument2 pagesCourse Folders Fall 2019 EEXahid YousafNo ratings yet
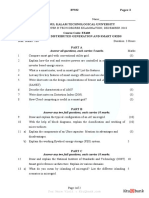
- EE403 Distributed Generation and Smart Grids: Answer All Questions, Each Carries 5 MarksDocument2 pagesEE403 Distributed Generation and Smart Grids: Answer All Questions, Each Carries 5 MarksXahid YousafNo ratings yet
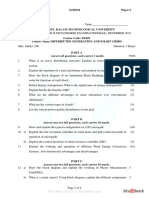
- 2019 Dec. EE403-C - Ktu Qbank - 2Document2 pages2019 Dec. EE403-C - Ktu Qbank - 2Xahid YousafNo ratings yet
- Ssc-Jen 2013: (Question Paper With Solutions)Document31 pagesSsc-Jen 2013: (Question Paper With Solutions)Xahid YousafNo ratings yet
- Voice Recognition Application Based Home Automation System With People CounterDocument5 pagesVoice Recognition Application Based Home Automation System With People CounterXahid YousafNo ratings yet
- Advt No.34-2020 13-11-2020 X7 VersionDocument1 pageAdvt No.34-2020 13-11-2020 X7 VersionSheikh JunaidNo ratings yet
- P 1 Aims EnergyDocument1 pageP 1 Aims EnergyXahid YousafNo ratings yet
- Addendum (Positions Vacant) : University of Engineering and Technology, LahoreDocument2 pagesAddendum (Positions Vacant) : University of Engineering and Technology, LahoreXahid YousafNo ratings yet
- A Measurement Study of Cooperative Network On Wimax Technology Using Bicm LDPC With Iterative Decoding TechniqueDocument1 pageA Measurement Study of Cooperative Network On Wimax Technology Using Bicm LDPC With Iterative Decoding TechniqueXahid YousafNo ratings yet
- Transformer Overloading Control by Controlling The Operational-Modes of High-Power ConvertersDocument1 pageTransformer Overloading Control by Controlling The Operational-Modes of High-Power ConvertersXahid YousafNo ratings yet
- Distributed Generation in Power Systems: An Overview and Key IssuesDocument9 pagesDistributed Generation in Power Systems: An Overview and Key IssuesXahid YousafNo ratings yet
- P1 Electric VDocument1 pageP1 Electric VXahid YousafNo ratings yet
- Inter-Area Oscillation Damping and Voltage Regulation by Using UPFC For 500 KV Transmission NetworkDocument5 pagesInter-Area Oscillation Damping and Voltage Regulation by Using UPFC For 500 KV Transmission NetworkXahid YousafNo ratings yet
- P 1 IEEE AccessDocument1 pageP 1 IEEE AccessXahid YousafNo ratings yet
- Energies 12 00553Document12 pagesEnergies 12 00553Xahid YousafNo ratings yet
- P1 Fractional ConfDocument1 pageP1 Fractional ConfXahid YousafNo ratings yet
- The National Academies PressDocument98 pagesThe National Academies PressXahid YousafNo ratings yet
- Thermocouple Gauge vs Pirani Gauge: Which is BestDocument6 pagesThermocouple Gauge vs Pirani Gauge: Which is BestXahid YousafNo ratings yet
- Probset 2 SolnDocument10 pagesProbset 2 SolnDominic MendozaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Ariel StoryDocument2 pagesAriel StoryKKN Pasusukan2018No ratings yet
- Three Phase Transformer Model For TransientsDocument10 pagesThree Phase Transformer Model For TransientsYeissonSanabriaNo ratings yet
- Phantom Susan KayDocument379 pagesPhantom Susan Kaytheeyeofthemoon100% (9)
- BCOM 302 BookDocument179 pagesBCOM 302 BookHitanshi AgarwalNo ratings yet
- I Will Call Upon The Lord - ACYM - NewestDocument1 pageI Will Call Upon The Lord - ACYM - NewestGerd SteveNo ratings yet
- Hitachi Datasheet Thin Image SnapshotDocument2 pagesHitachi Datasheet Thin Image Snapshotemail7urangNo ratings yet
- Ca Final DT (New) Chapterwise Abc & Marks Analysis - Ca Ravi AgarwalDocument5 pagesCa Final DT (New) Chapterwise Abc & Marks Analysis - Ca Ravi AgarwalROHIT JAIN100% (1)
- Discuss in Details With Appropriate Examples What Factors Could Lead To Sympatric and Allopatric SpeciationDocument5 pagesDiscuss in Details With Appropriate Examples What Factors Could Lead To Sympatric and Allopatric SpeciationKhairul ShahmiNo ratings yet
- Media Planning SampleDocument37 pagesMedia Planning SampleHuzaifa Aman AzizNo ratings yet
- WORKSHOP ON ACCOUNTING OF IJARAHDocument12 pagesWORKSHOP ON ACCOUNTING OF IJARAHAkif ShaikhNo ratings yet
- Nitrate Reduction in Sulfate Reducing BacteriaDocument10 pagesNitrate Reduction in Sulfate Reducing BacteriaCatalinaManjarresNo ratings yet
- Librarianship and Professional Ethics: Understanding Standards for Library ProfessionalsDocument12 pagesLibrarianship and Professional Ethics: Understanding Standards for Library ProfessionalsHALLNo ratings yet
- 5 - Econ - Advanced Economic Theory (Eng)Document1 page5 - Econ - Advanced Economic Theory (Eng)David JackNo ratings yet
- Extinction - WikipediaDocument14 pagesExtinction - Wikipediaskline3No ratings yet
- Source: Sonia S. Daquila. The Seeds of RevolutionDocument6 pagesSource: Sonia S. Daquila. The Seeds of RevolutionJulliena BakersNo ratings yet
- The Sims FreeplayDocument14 pagesThe Sims FreeplayFlorianNo ratings yet
- Word Formation - ExercisesDocument4 pagesWord Formation - ExercisesAna CiocanNo ratings yet
- AwsDocument8 pagesAwskiranNo ratings yet
- Chapter 10 HandoutDocument18 pagesChapter 10 HandoutChad FerninNo ratings yet
- ANTENATAL ASSESSMENT Form 13Document4 pagesANTENATAL ASSESSMENT Form 13Kaku ManishaNo ratings yet
- Lecture Notes 1-8Document39 pagesLecture Notes 1-8Mehdi MohmoodNo ratings yet
- The Research TeamDocument4 pagesThe Research Teamapi-272078177No ratings yet
- Understanding Deuteronomy On Its Own TermsDocument5 pagesUnderstanding Deuteronomy On Its Own TermsAlberto RodriguesNo ratings yet
- Sexual Self PDFDocument23 pagesSexual Self PDFEden Faith Aggalao100% (1)
- Unit Test, Part 2: Literature With A Purpose: Total Score: - of 40 PointsDocument3 pagesUnit Test, Part 2: Literature With A Purpose: Total Score: - of 40 PointsAriana Stephanya Anguiano VelazquezNo ratings yet
- 6 Strategies For Effective Financial Management Trends in K12 SchoolsDocument16 pages6 Strategies For Effective Financial Management Trends in K12 SchoolsRainiel Victor M. CrisologoNo ratings yet
- Semi-Detailed Lesson Plan Template: Pagsanjan Intergrated National High School 8Document3 pagesSemi-Detailed Lesson Plan Template: Pagsanjan Intergrated National High School 8Mae Ganate RoblesNo ratings yet
- Testing Your Understanding: The Dash, Slash, Ellipses & BracketsDocument2 pagesTesting Your Understanding: The Dash, Slash, Ellipses & BracketsBatsaikhan DashdondogNo ratings yet
- CSEC Notes US in The CaribbeanDocument8 pagesCSEC Notes US in The Caribbeanvernon white100% (2)
- Intermediate Reading Comprehension Test 03Document5 pagesIntermediate Reading Comprehension Test 03MZNo ratings yet