You might also like
- MsgSpec v344 PDFDocument119 pagesMsgSpec v344 PDFqweceNo ratings yet
- Aci 207.1Document38 pagesAci 207.1safak kahraman100% (7)
- Banas Dairy ETP Training ReportDocument38 pagesBanas Dairy ETP Training ReportEagle eye0% (2)
- BAR Digest MenuDocument4 pagesBAR Digest MenuFloila Jane YmasNo ratings yet
- Aerospace 04 00003sdDocument17 pagesAerospace 04 00003sdnabillNo ratings yet
- UAV GNC Chapter PDFDocument30 pagesUAV GNC Chapter PDFMrZaggyNo ratings yet
- Principles of Guidance, Navigation and Control of UavsDocument30 pagesPrinciples of Guidance, Navigation and Control of Uavspervaiz KhalidNo ratings yet
- Accurate Modeling and Robust Hovering Control For A Quad-Rotor VTOL AircraftDocument19 pagesAccurate Modeling and Robust Hovering Control For A Quad-Rotor VTOL AircraftIkeaMonsterNo ratings yet
- Vtol Design PDFDocument25 pagesVtol Design PDFElner CrystianNo ratings yet
- Feedback Linearization and High Order Sliding Mode Observer For A Quadrotor UAVDocument8 pagesFeedback Linearization and High Order Sliding Mode Observer For A Quadrotor UAVVictor Hugo OrtizNo ratings yet
- IndoorUAVControlUsingMulti cameraVisualFeedbackDocument30 pagesIndoorUAVControlUsingMulti cameraVisualFeedbackarifizudin39No ratings yet
- Res 2Document4 pagesRes 2engr_n_n_malikNo ratings yet
- Developing of A Video-Based Model For UAV Autonomous NavigationDocument12 pagesDeveloping of A Video-Based Model For UAV Autonomous NavigationChrisnaj HuEkOЯnNo ratings yet
- J Robot 2004 09 017Document15 pagesJ Robot 2004 09 017AhmedNo ratings yet
- Unmanned Aircraft Systems For Remote Building Inspection and MonitoringDocument8 pagesUnmanned Aircraft Systems For Remote Building Inspection and MonitoringAmada Arango PalominoNo ratings yet
- Sensor Fusion For Attitude Estimation and PID Control of Quadrotor UAVDocument8 pagesSensor Fusion For Attitude Estimation and PID Control of Quadrotor UAVSemih AteşNo ratings yet
- Control and Navigation System For A Fixed-Wing Unmanned Aerial VehicleDocument11 pagesControl and Navigation System For A Fixed-Wing Unmanned Aerial VehicleAfif PradhanaNo ratings yet
- Variable Structure-Model Reference Adaptive Control For Stabilization The Attitude of UAVDocument12 pagesVariable Structure-Model Reference Adaptive Control For Stabilization The Attitude of UAVNaod ZerihunNo ratings yet
- Heba ElKholy Thesis S2014Document13 pagesHeba ElKholy Thesis S2014AlexandraAndreeaNo ratings yet
- Adaptive Backstepping Flight Control for Mini-UAVDocument18 pagesAdaptive Backstepping Flight Control for Mini-UAVoussama sadkiNo ratings yet
- Development of Flight Controller Using STM Microcontroller BoardDocument5 pagesDevelopment of Flight Controller Using STM Microcontroller BoardaeroacademicNo ratings yet
- Er Giner 2012 VtolDocument10 pagesEr Giner 2012 VtolAtharva SalunkheNo ratings yet
- Control and Navigation System For A Fixed-Wing Unmanned Aerial VehicleDocument11 pagesControl and Navigation System For A Fixed-Wing Unmanned Aerial VehicleJU EE 2021No ratings yet
- Controlling of An Under-Actuated Quadrotor UAV Equipped With A ManipulatorDocument11 pagesControlling of An Under-Actuated Quadrotor UAV Equipped With A ManipulatorJoe ReninNo ratings yet
- 17253-67692-2-PB (1)Document13 pages17253-67692-2-PB (1)Abdul MajidNo ratings yet
- A Survey On Open-Source Flight Control Platforms of Unmanned Aerial VehicleDocument7 pagesA Survey On Open-Source Flight Control Platforms of Unmanned Aerial Vehicle029Muhammad Robith Fikris SholihNo ratings yet
- SENSOR-ENABLED FLYING ROBOT MONITORS ENVIRONMENTDocument28 pagesSENSOR-ENABLED FLYING ROBOT MONITORS ENVIRONMENTMahaManthraNo ratings yet
- Submit Stencil: Advances in Unmanned Aerial Vehicles TechnologiesDocument13 pagesSubmit Stencil: Advances in Unmanned Aerial Vehicles TechnologiesÜmit Müfit GüzeyNo ratings yet
- Sensors 2016Document20 pagesSensors 2016Sergey SokolovNo ratings yet
- Real-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterDocument6 pagesReal-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterasdssNo ratings yet
- Control Algorithm For The Inertial Stabilization of UavsDocument6 pagesControl Algorithm For The Inertial Stabilization of UavsPaMe LiTaNo ratings yet
- Autonomous UAV With Human Detection: Kshitij Karnawat, Nihar Asare, Sumit Anilkumar Singh, and Anju KulkarniDocument7 pagesAutonomous UAV With Human Detection: Kshitij Karnawat, Nihar Asare, Sumit Anilkumar Singh, and Anju KulkarniexampleNo ratings yet
- Development of Autonomous Landing System for UAVsDocument60 pagesDevelopment of Autonomous Landing System for UAVsJames Dunthorne75% (4)
- Real Time Stabilization of An Eight RotoDocument9 pagesReal Time Stabilization of An Eight RotoTomislav SertićNo ratings yet
- Control and Flight Test of A Tilt-Rotor Unmanned Aerial VehicleDocument12 pagesControl and Flight Test of A Tilt-Rotor Unmanned Aerial VehicleArshia MoftakharihajimirzaeiNo ratings yet
- E3sconf Enos2018 00012Document8 pagesE3sconf Enos2018 00012Alexander CasallasNo ratings yet
- Surveillance Drones and Their ApplicationsDocument4 pagesSurveillance Drones and Their ApplicationsAryan RautNo ratings yet
- Paper 2 FinalDocument9 pagesPaper 2 FinalThien MaiNo ratings yet
- Full Report ControlDocument13 pagesFull Report Controlariff aliNo ratings yet
- Interfacing Matlab-2591 PDFDocument8 pagesInterfacing Matlab-2591 PDFBourrasNo ratings yet
- Autonomous Uavs: Cooperative Tracking of Moving Targets by A Team ofDocument9 pagesAutonomous Uavs: Cooperative Tracking of Moving Targets by A Team ofArun GopinathNo ratings yet
- Adaptive Sliding Mode Control For Attitude and Altitude System of A Quadcopter UAV Via Neural NetworkDocument10 pagesAdaptive Sliding Mode Control For Attitude and Altitude System of A Quadcopter UAV Via Neural Networkdelima palwa sariNo ratings yet
- SysToL 2019 Paper2Document7 pagesSysToL 2019 Paper2pep5656No ratings yet
- Design of A Lateral Motion Controller For A Small Unmanned Aerial Vehicle (SUAV)Document6 pagesDesign of A Lateral Motion Controller For A Small Unmanned Aerial Vehicle (SUAV)Adrian DincaNo ratings yet
- Autonomous Hovering of A Vision/IMU Guided QuadrotorDocument6 pagesAutonomous Hovering of A Vision/IMU Guided QuadrotorKok Kai YitNo ratings yet
- Unmanned Aerial Vehicle Design: KeywordsDocument2 pagesUnmanned Aerial Vehicle Design: KeywordsKelvin Allan Soler LopezNo ratings yet
- Fundamentals of Small Unmanned Aircraft Flight-BartonDocument18 pagesFundamentals of Small Unmanned Aircraft Flight-BartonGaurang 'TottaPhilic' Gupta100% (1)
- W F P C A UAV: Aypoint Light Arameter Omparison of AN UtonomousDocument11 pagesW F P C A UAV: Aypoint Light Arameter Omparison of AN UtonomousAdam HansenNo ratings yet
- Enhanced Backstepping Controller Design With ApplicationDocument27 pagesEnhanced Backstepping Controller Design With ApplicationmohammedNo ratings yet
- Disturbance-Rejection High-Precision Motion Control of A Stewart PlatformDocument11 pagesDisturbance-Rejection High-Precision Motion Control of A Stewart PlatformMax ZemaNo ratings yet
- A Vision-Based Method For Determining Aircraft State During Spin RecoveryDocument17 pagesA Vision-Based Method For Determining Aircraft State During Spin RecoveryJay GalangNo ratings yet
- Control and Estimation of A Quadcopter Dynamical MDocument14 pagesControl and Estimation of A Quadcopter Dynamical MmahendranavionicsNo ratings yet
- F 3400083614Document4 pagesF 3400083614aminhardNo ratings yet
- Drone Flight Inspection ReviewDocument8 pagesDrone Flight Inspection Reviewfika puteraNo ratings yet
- Modeling and Control of Unmanned Aerial Vehicle: D. Y. Dube R. K. MunjeDocument4 pagesModeling and Control of Unmanned Aerial Vehicle: D. Y. Dube R. K. MunjeMahdi LabedNo ratings yet
- Quadrotor Flight Dynamics and Control TheoryDocument17 pagesQuadrotor Flight Dynamics and Control TheoryAngel ChicchonNo ratings yet
- A Hardware-In-Loop Platform For Rotary Wings Unmanned Aerial VehiclesDocument6 pagesA Hardware-In-Loop Platform For Rotary Wings Unmanned Aerial Vehiclesmarcydios2015No ratings yet
- Hoffmann Et Al Quadrotor DASC04Document10 pagesHoffmann Et Al Quadrotor DASC04Damian ChmielewskiNo ratings yet
- MP Avt 355 21Document12 pagesMP Avt 355 21krishnakumarramarajNo ratings yet
- Mathematical Modeling of UAVDocument8 pagesMathematical Modeling of UAVDanny FernandoNo ratings yet
- BICOPTERDocument22 pagesBICOPTERManideep Ananthula100% (4)
- Boeing Autopilot DesignDocument6 pagesBoeing Autopilot Designzeuscaan88No ratings yet
- Drones 07 00253 v2Document20 pagesDrones 07 00253 v2Tekletsadik TeketelNo ratings yet
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentFrom EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentNo ratings yet
- CRP229 User Manual - V1.0.00Document29 pagesCRP229 User Manual - V1.0.00Mo'menKhaledNo ratings yet
- Homework #4Document12 pagesHomework #4Mo'menKhaledNo ratings yet
- Problem 6.2Document2 pagesProblem 6.2Mo'menKhaledNo ratings yet
- HW #3Document4 pagesHW #3Mo'menKhaledNo ratings yet
- Leg Wri FInal ExamDocument15 pagesLeg Wri FInal ExamGillian CalpitoNo ratings yet
- 2CG ELTT2 KS TitanMagazine Anazelle-Shan PromoDocument12 pages2CG ELTT2 KS TitanMagazine Anazelle-Shan PromoJohn SmithNo ratings yet
- Cib DC22692Document16 pagesCib DC22692Ashutosh SharmaNo ratings yet
- COVID-19's Impact on Business PresentationsDocument2 pagesCOVID-19's Impact on Business PresentationsRetmo NandoNo ratings yet
- 1.1 Introduction To Networks - Networks Affect Our LivesDocument2 pages1.1 Introduction To Networks - Networks Affect Our LivesCristian MoralesNo ratings yet
- LPM 52 Compar Ref GuideDocument54 pagesLPM 52 Compar Ref GuideJimmy GilcesNo ratings yet
- Magnetism 02Document10 pagesMagnetism 02Niharika DeNo ratings yet
- CCS PDFDocument2 pagesCCS PDFАндрей НадточийNo ratings yet
- Ralf Behrens: About The ArtistDocument3 pagesRalf Behrens: About The ArtistStavros DemosthenousNo ratings yet
- Sample Property Management AgreementDocument13 pagesSample Property Management AgreementSarah TNo ratings yet
- 9IMJan 4477 1Document9 pages9IMJan 4477 1Upasana PadhiNo ratings yet
- Credentials List with Multiple Usernames, Passwords and Expiration DatesDocument1 pageCredentials List with Multiple Usernames, Passwords and Expiration DatesJOHN VEGANo ratings yet
- Global Cleantech Innovation Programme IndiaDocument122 pagesGlobal Cleantech Innovation Programme Indiaficisid ficisidNo ratings yet
- SDNY - Girl Scouts V Boy Scouts ComplaintDocument50 pagesSDNY - Girl Scouts V Boy Scouts Complaintjan.wolfe5356No ratings yet
- Academy Broadcasting Services Managerial MapDocument1 pageAcademy Broadcasting Services Managerial MapAnthony WinklesonNo ratings yet
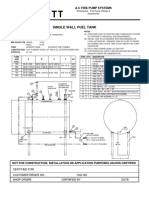
- Single Wall Fuel Tank: FP 2.7 A-C Fire Pump SystemsDocument1 pageSingle Wall Fuel Tank: FP 2.7 A-C Fire Pump Systemsricardo cardosoNo ratings yet
- Erp and Mis Project - Thanks To PsoDocument31 pagesErp and Mis Project - Thanks To PsoAkbar Syed100% (1)
- CASE DigeSTDocument2 pagesCASE DigeSTZepht BadillaNo ratings yet
- 4.5.1 Forestry LawsDocument31 pages4.5.1 Forestry LawsMark OrtolaNo ratings yet
- Fujitsu Spoljni Multi Inverter Aoyg45lbt8 Za 8 Unutrasnjih Jedinica KatalogDocument4 pagesFujitsu Spoljni Multi Inverter Aoyg45lbt8 Za 8 Unutrasnjih Jedinica KatalogSasa021gNo ratings yet
- CAP Regulation 20-1 - 05/29/2000Document47 pagesCAP Regulation 20-1 - 05/29/2000CAP History LibraryNo ratings yet
- Terms and Condition PDFDocument2 pagesTerms and Condition PDFSeanmarie CabralesNo ratings yet
- Deed of Sale - Motor VehicleDocument4 pagesDeed of Sale - Motor Vehiclekyle domingoNo ratings yet
- Comparing Time Series Models to Predict Future COVID-19 CasesDocument31 pagesComparing Time Series Models to Predict Future COVID-19 CasesManoj KumarNo ratings yet
- A320 Normal ProceduresDocument40 pagesA320 Normal ProceduresRajesh KumarNo ratings yet
- CadLink Flyer 369044 937 Rev 00Document2 pagesCadLink Flyer 369044 937 Rev 00ShanaHNo ratings yet