You might also like
- XCJ103C: Product Data SheetDocument6 pagesXCJ103C: Product Data SheetĆosić AsimNo ratings yet
- SolidCAM 2014 EngDocument39 pagesSolidCAM 2014 EngĆosić AsimNo ratings yet
- Modeliranje Procesa U MotorimaDocument248 pagesModeliranje Procesa U MotorimaĆosić AsimNo ratings yet
- FH Vorarlberg Vorarlberg University of Applied Sciences: Master's in MechatronicsDocument208 pagesFH Vorarlberg Vorarlberg University of Applied Sciences: Master's in MechatronicsĆosić AsimNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
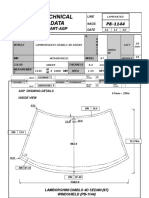
- AGP Diablo Glass 1Document5 pagesAGP Diablo Glass 1Jim BeamNo ratings yet
- T SB 0051 09Document3 pagesT SB 0051 09goombaNo ratings yet
- Zuidberg General LeafletDocument6 pagesZuidberg General Leafletinfo4826No ratings yet
- Wheel Steering System PDFDocument6 pagesWheel Steering System PDFvivek ghoriNo ratings yet
- A200 Limo PDFDocument2 pagesA200 Limo PDFahhlNo ratings yet
- 122 - Bando Serpentine Belt Cross ReferenceDocument2 pages122 - Bando Serpentine Belt Cross ReferenceNil Acuña100% (2)
- Avon PDFDocument47 pagesAvon PDFVishal Kumar ShawNo ratings yet
- 2015 E-Z-GO Retail Price List Express, Terrain, TXT Freedom/Shuttle 2+2, RXV Freedom/Shuttle 2+2, & 2fiveDocument48 pages2015 E-Z-GO Retail Price List Express, Terrain, TXT Freedom/Shuttle 2+2, RXV Freedom/Shuttle 2+2, & 2fiveCarlos QuijadaNo ratings yet
- Full Air SuspensionDocument5 pagesFull Air Suspensionmonikaneha123No ratings yet
- Last Herb 204 FlowDocument3 pagesLast Herb 204 FlowlastbikesNo ratings yet
- Gabriel CatalogueDocument12 pagesGabriel CataloguePatil Harshal100% (1)
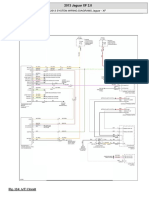
- Jaguar XF 2.0 Turbo 2013 - Controle Da Transmissão - Diagrama Elétrico PDFDocument3 pagesJaguar XF 2.0 Turbo 2013 - Controle Da Transmissão - Diagrama Elétrico PDFAdilsonAmorimNo ratings yet
- WD g4 00 PDFDocument57 pagesWD g4 00 PDFYurbass0% (1)
- Audi Quattro ConceptDocument2 pagesAudi Quattro ConceptAnonymous GKqp4HnNo ratings yet
- Classic C5 Sidecar Fittment ManualDocument16 pagesClassic C5 Sidecar Fittment ManualJhon Eliseo Soto Sanchez100% (1)
- KSuite TrucksDocument77 pagesKSuite TrucksZubieta Ztruck DaenNo ratings yet
- 2001 F150 Wiring DiagramsDocument122 pages2001 F150 Wiring Diagramsmike90% (21)
- Forklift Safety Is Up To YouDocument2 pagesForklift Safety Is Up To YouZeeshan Bajwa100% (1)
- Project Report On AutomobilesDocument32 pagesProject Report On AutomobilesAnilGoyalNo ratings yet
- SAGA 2021 BrochureDocument4 pagesSAGA 2021 BrochureKhizer SikanderNo ratings yet
- Automoblox Car AssemblyDocument1 pageAutomoblox Car AssemblyJoshua BolinNo ratings yet
- RML 2023Document8 pagesRML 2023Ria Mae LlantoNo ratings yet
- KROSS 2014 Bicycle CatalogueDocument108 pagesKROSS 2014 Bicycle CatalogueAndrzej GawlikNo ratings yet
- Warehouse 1 of 9: List of Pre-Owned Vehicles For SaleDocument9 pagesWarehouse 1 of 9: List of Pre-Owned Vehicles For SaleRaymart S. IringanNo ratings yet
- Start Up & Shut Down Procedures Underground LoadersDocument1 pageStart Up & Shut Down Procedures Underground LoadersGustavoNo ratings yet
- 2007 Chrysler Sebring Limited 2007 System Wiring Diagrams Chrysler-Sebring 4D SedanDocument167 pages2007 Chrysler Sebring Limited 2007 System Wiring Diagrams Chrysler-Sebring 4D Sedandiako lopezNo ratings yet
- Diagrama Electrico Completo Jetta 95 mk3 vr6 DescargarDocument52 pagesDiagrama Electrico Completo Jetta 95 mk3 vr6 DescargarMarco Sebastián Méndez Saavedra60% (5)
- Craig's Auto Detailing Packages and PricingDocument1 pageCraig's Auto Detailing Packages and PricingCraig KaedingNo ratings yet
- Tata Aria With 36 Features LatDocument88 pagesTata Aria With 36 Features LatAbhijeet LimayeNo ratings yet
- 1996 850 Wiring DiagramDocument238 pages1996 850 Wiring DiagramwilderNo ratings yet