You might also like
- Transformation - Transfer Function State SpaceDocument9 pagesTransformation - Transfer Function State SpacekumargpalaniNo ratings yet
- Chương 6 Hay 2Document10 pagesChương 6 Hay 2Cao Quang HưngNo ratings yet
- S3a Transformation Transfer Function State SpaceDocument7 pagesS3a Transformation Transfer Function State SpacerajeshmholmukheNo ratings yet
- Automatic Control 2 NotesDocument28 pagesAutomatic Control 2 NotesÇağın OkuyucuNo ratings yet
- Analysis Via State SpaceDocument24 pagesAnalysis Via State SpaceYusafxai YxaiNo ratings yet
- State Space WikiDocument13 pagesState Space WikiTeju DaveNo ratings yet
- Transfer FunctionsDocument18 pagesTransfer FunctionsSolayao, Jan Marvin J.No ratings yet
- State Space AnalysisDocument73 pagesState Space AnalysisDevaki V DeviNo ratings yet
- Unit 1 State SpaceDocument57 pagesUnit 1 State SpaceJoseph AgboglaNo ratings yet
- MODEL MATCHING For NONLINEAR SYSTEMS Not Having The State Space RealizationDocument5 pagesMODEL MATCHING For NONLINEAR SYSTEMS Not Having The State Space RealizationSohibul HajahNo ratings yet
- State Space RepresentationDocument34 pagesState Space RepresentationMuhammad UsmanNo ratings yet
- Transfer Function AnalysisDocument7 pagesTransfer Function AnalysisMax Sedric L LaylayNo ratings yet
- Che821 Lecture SixDocument44 pagesChe821 Lecture Sixprof.kess.unibenNo ratings yet
- Modeling in The Time Domain: Omisol and TarifeDocument28 pagesModeling in The Time Domain: Omisol and TarifeRovick Tarife0% (1)
- Automated Control Unit LLDocument5 pagesAutomated Control Unit LLRakgnar LodbrokNo ratings yet
- FeedbackDocument11 pagesFeedbackApril BalceNo ratings yet
- Modeling in The Time DomainDocument19 pagesModeling in The Time DomainAnonymous 55cH67eIxNo ratings yet
- SstotfDocument3 pagesSstotfSudip MondalNo ratings yet
- De Nition of System StateDocument14 pagesDe Nition of System Stateglenda_hernandez09No ratings yet
- Diff Eqn and State Variable Analysis 18 March 23Document70 pagesDiff Eqn and State Variable Analysis 18 March 23Md Nazmus Sadat ShadNo ratings yet
- Coursenotes Control Aero 4308Document10 pagesCoursenotes Control Aero 4308Phil GuerinNo ratings yet
- Lecture-3 Modeling in Time DomainDocument24 pagesLecture-3 Modeling in Time DomainRayana ray0% (1)
- Project ReportDocument21 pagesProject ReportbabinaNo ratings yet
- Initial Version of State Transition AlgorithmDocument4 pagesInitial Version of State Transition AlgorithmXiaojun ZhouNo ratings yet
- Circuit Theory Laplace Transform GuideDocument14 pagesCircuit Theory Laplace Transform GuideAkshay Pabbathi100% (1)
- State SpaceDocument101 pagesState SpaceShivam AroraNo ratings yet
- Zeros, The Roots of TheDocument2 pagesZeros, The Roots of TheNino ArbastoNo ratings yet
- Mathematical ModellingDocument36 pagesMathematical ModellingMohd Fazli100% (2)
- EEE 3201: Control System I: Week 2: Lecture 1Document11 pagesEEE 3201: Control System I: Week 2: Lecture 1harun or rashidNo ratings yet
- Presentation On Laplace and Inverse Transform, TF and TD ModelingDocument20 pagesPresentation On Laplace and Inverse Transform, TF and TD ModelingHassan RazaNo ratings yet
- 3-State Space PDFDocument29 pages3-State Space PDFzeeshanNo ratings yet
- ChE 171 Module 3: First-Order Open Loop SystemsDocument15 pagesChE 171 Module 3: First-Order Open Loop SystemsErnie Mark Patosa MaratasNo ratings yet
- Chap 2Document54 pagesChap 2kamlesh1714No ratings yet
- Hamilton SystemDocument4 pagesHamilton SystemmrhflameableNo ratings yet
- S2. State Space Representation Using Physical VariableDocument6 pagesS2. State Space Representation Using Physical VariablerajeshmholmukheNo ratings yet
- Analysis of Control Systems in State Space: OGATA ch.11 pg.752Document12 pagesAnalysis of Control Systems in State Space: OGATA ch.11 pg.752Can GöksuNo ratings yet
- Lec 07Document25 pagesLec 07api-247714257No ratings yet
- Control Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiDocument23 pagesControl Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiTalha JalilNo ratings yet
- Example X (T) Step Function: Laplace TransformsDocument3 pagesExample X (T) Step Function: Laplace Transformslucky250No ratings yet
- Lecture (4) Mathematical Modeling in Mechanical and Electrical SystemDocument6 pagesLecture (4) Mathematical Modeling in Mechanical and Electrical SystemAbdullah Mohammed AlsaadouniNo ratings yet
- 1 - L2-State Space AnalysisDocument9 pages1 - L2-State Space Analysisabbas1999n8No ratings yet
- CHAPTER 1 Modeling in The Frequency DomainDocument17 pagesCHAPTER 1 Modeling in The Frequency DomainAnnette TageufoueNo ratings yet
- 15ECE302 Control Systems Engineering: Chapter 2: Modelling in Frequency DomainDocument41 pages15ECE302 Control Systems Engineering: Chapter 2: Modelling in Frequency DomainSandeepNo ratings yet
- Lec8 PDFDocument16 pagesLec8 PDFRaviNo ratings yet
- Representation of A Vehicular Traffic Model Using Hybrid SystemsDocument22 pagesRepresentation of A Vehicular Traffic Model Using Hybrid Systemscero9794041No ratings yet
- 5.1 - Analysis Based On State SpaceDocument62 pages5.1 - Analysis Based On State SpaceMarceloNo ratings yet
- Slide 2Document89 pagesSlide 2EnesVSNo ratings yet
- Quarter-Car Suspension Model State-Space AnalysisDocument10 pagesQuarter-Car Suspension Model State-Space Analysisimran5705074No ratings yet
- Virtual Cellular ManufacturingDocument13 pagesVirtual Cellular ManufacturingHuỳnh TuyềnNo ratings yet
- Digital Control and State Variable AnalysisDocument16 pagesDigital Control and State Variable AnalysisAditya VasisthNo ratings yet
- L 05 - Ece 4217Document26 pagesL 05 - Ece 4217কবুতর বাড়ি Pigeon HomeNo ratings yet
- States, Transitions and Finite-State Transition SystemDocument30 pagesStates, Transitions and Finite-State Transition SystemJoshua KurianNo ratings yet
- Transfer Functions: This Operation Can Be Performed Using This CommandDocument46 pagesTransfer Functions: This Operation Can Be Performed Using This CommandJasleen Kaur HoraNo ratings yet
- State Feedback Controller Design Using Pole PlacementDocument100 pagesState Feedback Controller Design Using Pole PlacementMuhammad JunaidNo ratings yet
- Free Body Diagram and Newton's LawDocument4 pagesFree Body Diagram and Newton's Lawseeknana2833No ratings yet
- 01 Automatic Control System Modeling and RepresentationDocument55 pages01 Automatic Control System Modeling and RepresentationPaul BonaNo ratings yet
- Laplace Transform 2020Document66 pagesLaplace Transform 2020Angeline Chasakara100% (2)
- Updated Lecture Chapter 12Document69 pagesUpdated Lecture Chapter 12Maham AslamNo ratings yet
- Transfer Function State Space (Order of Numerator Order of Denominator)Document3 pagesTransfer Function State Space (Order of Numerator Order of Denominator)Jimmy LeeNo ratings yet
- Environment of IYBDocument16 pagesEnvironment of IYBAbinesh TrNo ratings yet
- RootsDocument1 pageRootsAbinesh TrNo ratings yet
- Mammals Critically EndangeredDocument1 pageMammals Critically EndangeredAbinesh TrNo ratings yet
- BSNL Annexures Police Verification UndertakingDocument2 pagesBSNL Annexures Police Verification UndertakingAbinesh TrNo ratings yet
- Quantum Numbers and Electron ConfigurationsDocument8 pagesQuantum Numbers and Electron ConfigurationsAbinesh TrNo ratings yet
- Traditional KnowledgeDocument1 pageTraditional KnowledgeAbinesh TrNo ratings yet
- Oscillators PDFDocument22 pagesOscillators PDFAbinesh TrNo ratings yet
- Vajiram Quick Rev Prelims 2017 Part 2 Xaam - inDocument81 pagesVajiram Quick Rev Prelims 2017 Part 2 Xaam - inAbinesh TrNo ratings yet
- To DoDocument1 pageTo DoAbinesh TrNo ratings yet
- 2's Complement - Technical NotesDocument4 pages2's Complement - Technical NotesAbinesh TrNo ratings yet
- Oil Transformer ScopeDocument3 pagesOil Transformer ScopeAbinesh TrNo ratings yet
- BJT Small Signal ParametersDocument4 pagesBJT Small Signal ParametersAbinesh TrNo ratings yet
- India Physical Map: States and CoastlinesDocument1 pageIndia Physical Map: States and CoastlinesAbinesh TrNo ratings yet
- Oil Transformer ScopeDocument3 pagesOil Transformer ScopeAbinesh TrNo ratings yet
- World Bank Assisted Project - Neeranchal - For The Watershed Component (Erstwhile Integrated Watershed Management Programme) of The Pradhan Mantri Krishi Sinchayi YojanaDocument1 pageWorld Bank Assisted Project - Neeranchal - For The Watershed Component (Erstwhile Integrated Watershed Management Programme) of The Pradhan Mantri Krishi Sinchayi YojanaAbinesh TrNo ratings yet
- Value Added TaxDocument23 pagesValue Added TaxAmit GuravNo ratings yet
- Tutorial - Distribution of Predicate TermsDocument1 pageTutorial - Distribution of Predicate TermsAbinesh TrNo ratings yet
- AcknowledgementDocument1 pageAcknowledgementAbinesh TrNo ratings yet
- A Fatally Flawed CommissionDocument4 pagesA Fatally Flawed CommissionAbinesh TrNo ratings yet
- Stand UpDocument6 pagesStand UpAbinesh Tr100% (1)
- Russia Signs Another Mega-Gas Deal With China - The HinduDocument1 pageRussia Signs Another Mega-Gas Deal With China - The HinduAbinesh TrNo ratings yet
- Kofax Digital Mailroom Webinar IDC Slides v4Document16 pagesKofax Digital Mailroom Webinar IDC Slides v4hteran28100% (2)
- Analisis API 1160Document201 pagesAnalisis API 1160Francisco SánchezNo ratings yet
- Indian Railways Service of Engineers: A Glorious ServiceDocument5 pagesIndian Railways Service of Engineers: A Glorious ServiceHabib Ur RahmanNo ratings yet
- Mind Map of "Architecture+Participation"Document1 pageMind Map of "Architecture+Participation"Maysan MamounNo ratings yet
- Sanyasa Suktam with meaningDocument3 pagesSanyasa Suktam with meaningkarthik saiNo ratings yet
- Evaluation of Completeness of Mother and Child Protection (MCP) Card in Bishnupur District, ManipurDocument5 pagesEvaluation of Completeness of Mother and Child Protection (MCP) Card in Bishnupur District, ManipurInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Prepositional Phrases in SentencesDocument2 pagesPrepositional Phrases in SentencesDianaNo ratings yet
- Zoomorphology: Morphology and Function of The Tube Feet of (Echinodermata: Crinoidea)Document13 pagesZoomorphology: Morphology and Function of The Tube Feet of (Echinodermata: Crinoidea)Indra SatriaNo ratings yet
- Drawing Made Easy PDFDocument70 pagesDrawing Made Easy PDFSohaib Arshad100% (3)
- Belajar Cepat Windows Server 2008Document4 pagesBelajar Cepat Windows Server 2008Faizal RasyidNo ratings yet
- Astrology and Athrishta K P 12 KS KrishnamurthiDocument401 pagesAstrology and Athrishta K P 12 KS Krishnamurthiaaditya80% (5)
- Case Study Dorothea Orem (Francar Jade For Sbmission) - TFNDocument2 pagesCase Study Dorothea Orem (Francar Jade For Sbmission) - TFNFrancar Jade De VeraNo ratings yet
- Shaikh Khalifa Bin Zayed Al-Nahyan Medical Dental College LahoreDocument1 pageShaikh Khalifa Bin Zayed Al-Nahyan Medical Dental College LahoreHamad GulNo ratings yet
- Anatomy of an AI SystemDocument23 pagesAnatomy of an AI SystemDiego Lawliet GedgeNo ratings yet
- Objective Questions and Answers in Chemical Engineering DR Ram Prasad PDFDocument4 pagesObjective Questions and Answers in Chemical Engineering DR Ram Prasad PDFManpreet Singh100% (1)
- The Development Cultural Studies in BritishDocument6 pagesThe Development Cultural Studies in BritishIeie HollyNo ratings yet
- Database Design Term Project 1Document3 pagesDatabase Design Term Project 1MuskanNo ratings yet
- Strategies in Teaching Social Studies Inductive and Deductive Andragogy vs. PedagogyDocument31 pagesStrategies in Teaching Social Studies Inductive and Deductive Andragogy vs. PedagogyArvie VillegasNo ratings yet
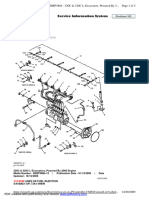
- Lineas de Inyeccion 320c MaaDocument3 pagesLineas de Inyeccion 320c MaaHAmir Alberto Mojica MojicaNo ratings yet
- Senior Executive Assistant ResumeDocument8 pagesSenior Executive Assistant Resumef5e28dkq100% (2)
- Lessons From Nothing - Activities For Language Teaching With Limited Time and Resources (Cambridge Handbooks For Language Teachers) 2Document121 pagesLessons From Nothing - Activities For Language Teaching With Limited Time and Resources (Cambridge Handbooks For Language Teachers) 2Ryan Ryan100% (1)
- T Beam PDFDocument2 pagesT Beam PDFjabri kotaNo ratings yet
- The Demands of Society From The Teacher As A PersonDocument2 pagesThe Demands of Society From The Teacher As A PersonKyle Ezra Doman100% (1)
- Is 2572 (2005) - Construction of Hollow and Solid Concrete Block Masonry - Code of PracticeDocument27 pagesIs 2572 (2005) - Construction of Hollow and Solid Concrete Block Masonry - Code of PracticeVIDYANo ratings yet
- Newspaper ChaseDocument10 pagesNewspaper Chasefi3sudirmanNo ratings yet
- Zinkgruvan Suecia Polimetálico TechRep - 2017Document178 pagesZinkgruvan Suecia Polimetálico TechRep - 2017manudemNo ratings yet
- DLL - Science 5 - Q3 - W2Document10 pagesDLL - Science 5 - Q3 - W2Eihcra SubacNo ratings yet
- Autism and Autism Spectrum Disorder Medical Hypothesis For Parasites Influencing AutismDocument3 pagesAutism and Autism Spectrum Disorder Medical Hypothesis For Parasites Influencing AutismCATHYNo ratings yet
- MASAR - Volume 02Document214 pagesMASAR - Volume 02Khaled MamdouhNo ratings yet
- A Formalist Approach To Robert FrostDocument6 pagesA Formalist Approach To Robert FrostAdel75% (4)