You might also like
- Math Texas TAKS With Answers 2009Document51 pagesMath Texas TAKS With Answers 2009aehsgo2collegeNo ratings yet
- Wordpress For Beginners Tutorial EbookDocument53 pagesWordpress For Beginners Tutorial EbookNicoJulius100% (1)
- Toshiba 40E210UDocument9 pagesToshiba 40E210UJosè Ramòn Silva Avilès100% (1)
- Motorised Screw JackDocument4 pagesMotorised Screw JackhidaiNo ratings yet
- Fanuc 16 - E Maintenance ManualDocument314 pagesFanuc 16 - E Maintenance Manualadeiv20027197100% (1)
- Regenerative Braking SystemDocument10 pagesRegenerative Braking SystemDanielDavidSitompulNo ratings yet
- Torque Vectoring With A Feedback and Feed Forward Controller-Applied To A Through The Road Hybrid Electric VehicleDocument6 pagesTorque Vectoring With A Feedback and Feed Forward Controller-Applied To A Through The Road Hybrid Electric Vehiclesmmj2010No ratings yet
- BigMart Sale Prediction Using Machine LearningDocument2 pagesBigMart Sale Prediction Using Machine LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Sci.10 Lesson Plan Electricity and MagnetismDocument5 pagesSci.10 Lesson Plan Electricity and MagnetismJeiril Divino100% (3)
- George Constantinesco Torque Converter Analysis by Simulink PDFDocument6 pagesGeorge Constantinesco Torque Converter Analysis by Simulink PDFslysoft.20009951No ratings yet
- RS900G DatasheetDocument9 pagesRS900G DatasheetsamuelpemonNo ratings yet
- LITERACY Teaching Guide For Senior High School. Manila: PNUDocument8 pagesLITERACY Teaching Guide For Senior High School. Manila: PNUJarven SaguinNo ratings yet
- Acronis #CyberFit Cloud Tech Fundamentals 2023 HandoutDocument286 pagesAcronis #CyberFit Cloud Tech Fundamentals 2023 HandoutFalcon NogueraNo ratings yet
- Online Examination System, Use Case ProjectDocument32 pagesOnline Examination System, Use Case ProjectMohit Sharma100% (23)
- Introduction To Physical SecurityDocument11 pagesIntroduction To Physical SecuritytanweerNo ratings yet
- Multi-Motor DrivesDocument6 pagesMulti-Motor DrivessriabolfazlNo ratings yet
- 4 WD Urban Electric Vehicle Motion Studies Based On MIMO Fuzzy Logic Speed ControllerDocument14 pages4 WD Urban Electric Vehicle Motion Studies Based On MIMO Fuzzy Logic Speed Controllermilou88No ratings yet
- 3 8Document18 pages3 8Martinito MacraméNo ratings yet
- Online Project of Adaptive Control Systems Applied To The Problem of Solar TrackingDocument9 pagesOnline Project of Adaptive Control Systems Applied To The Problem of Solar TrackingmadsonengNo ratings yet
- 2 Symposium On Lift and Escalator TechnologiesDocument12 pages2 Symposium On Lift and Escalator TechnologiesfreddyjoertyNo ratings yet
- Master Ahmed Hussnain 2014Document8 pagesMaster Ahmed Hussnain 2014Hary YoskovichNo ratings yet
- Radial Flux and Axial Flux PMSMDocument6 pagesRadial Flux and Axial Flux PMSMAmit ShuklaNo ratings yet
- Sensorless Control of 5 Phase BLCD MotorDocument6 pagesSensorless Control of 5 Phase BLCD Motorschlemihl69No ratings yet
- Robot Dynamics: Q G Q Q Q C Q Q MDocument8 pagesRobot Dynamics: Q G Q Q Q C Q Q MadolfoclesNo ratings yet
- EPS Tech Feature Single NODATADocument4 pagesEPS Tech Feature Single NODATARaja NesNo ratings yet
- Designof Mechatronics Final ReportDocument25 pagesDesignof Mechatronics Final ReportMoheb IshakNo ratings yet
- Dynamic Modelling (Intech)Document304 pagesDynamic Modelling (Intech)leonardo_arévalo_28No ratings yet
- Final ReportDocument20 pagesFinal ReportMuhammad Hussain Bilal100% (1)
- Torque Control of Ac Motor With Fopid Controller Based On Fuzzy Neural AlgorithmDocument18 pagesTorque Control of Ac Motor With Fopid Controller Based On Fuzzy Neural AlgorithmijicsjournalNo ratings yet
- Roll Angle Estimation in Two-Wheeled VehiclesDocument13 pagesRoll Angle Estimation in Two-Wheeled VehiclesTruong Van HoatNo ratings yet
- Technical Transactions 8/2019Document16 pagesTechnical Transactions 8/2019Mohan NaikNo ratings yet
- Parameter Identification and Comparision of An Induction Motor ModelsDocument11 pagesParameter Identification and Comparision of An Induction Motor ModelsJUAN4201No ratings yet
- Model Updating and Validation of A Dual-Rotor System: H. Miao, C. Zang, M. FriswellDocument16 pagesModel Updating and Validation of A Dual-Rotor System: H. Miao, C. Zang, M. FriswellPhuor TyNo ratings yet
- Virtual Diesel Engine in Simulank PDFDocument11 pagesVirtual Diesel Engine in Simulank PDFmechveenaNo ratings yet
- Designing Energy Efficient Traction Machines For Electric and Hybrid VehiclesDocument9 pagesDesigning Energy Efficient Traction Machines For Electric and Hybrid VehicleskodeegNo ratings yet
- A P F L M: Coustic Seudospectrum Based Ault Ocalization in OtorcyclesDocument11 pagesA P F L M: Coustic Seudospectrum Based Ault Ocalization in OtorcyclesAnonymous lVQ83F8mCNo ratings yet
- IEEE Trans Ind Elect FinalDocument14 pagesIEEE Trans Ind Elect Finalivan.vazdar5482No ratings yet
- 2 2ComponentSelection (140318)Document41 pages2 2ComponentSelection (140318)Quỳnh ChiNo ratings yet
- Multiobjective Optimal Design of An Inverter Fed Axial Flux Permanent Magnet In-Wheel Motor For Electric VehiclesDocument23 pagesMultiobjective Optimal Design of An Inverter Fed Axial Flux Permanent Magnet In-Wheel Motor For Electric Vehiclesrasim_m1146No ratings yet
- DSP Control of Stepper MotorDocument5 pagesDSP Control of Stepper MotorAhmedHyderMohdNo ratings yet
- Steer-By-Wire For Vehicle State Estimation and ControlDocument6 pagesSteer-By-Wire For Vehicle State Estimation and ControlvincemugnaioNo ratings yet
- Evaluation of Vehicle Handling by A Simplified Single Track ModelDocument11 pagesEvaluation of Vehicle Handling by A Simplified Single Track Modelnvs1981No ratings yet
- A Novel Approach For Modelling and Simulation of Sensor Less BLDC MotorDocument9 pagesA Novel Approach For Modelling and Simulation of Sensor Less BLDC MotorMefisto ElNo ratings yet
- Effi CycleDocument6 pagesEffi CycleHar ShaNo ratings yet
- Ijetae 0113 12Document7 pagesIjetae 0113 12ash1968No ratings yet
- Optimal Control System Based EPASDocument8 pagesOptimal Control System Based EPASNarender KumarNo ratings yet
- Modal Analysis High Speed SpindleDocument7 pagesModal Analysis High Speed Spindlenm2007kNo ratings yet
- 5.accidental Car Impact Analysis and CFDDocument6 pages5.accidental Car Impact Analysis and CFDprojectzfourNo ratings yet
- An Overview of Active Front Steering SystemDocument10 pagesAn Overview of Active Front Steering SystemdhairyashilNo ratings yet
- A Novel Technique For The Design of Controller of A Vector-Controlled Permanent Magnet Synchronous Motor DriveDocument6 pagesA Novel Technique For The Design of Controller of A Vector-Controlled Permanent Magnet Synchronous Motor Driveshoebhussain01No ratings yet
- Actuator Fault Detection System For A Mini-Quadrotor: A. Freddi, S. Longhi and A. MonteriùDocument6 pagesActuator Fault Detection System For A Mini-Quadrotor: A. Freddi, S. Longhi and A. MonteriùadilsondissoNo ratings yet
- Chen 2019Document8 pagesChen 2019Agus LutantoNo ratings yet
- Manutec Robor Dynamic SimulationDocument18 pagesManutec Robor Dynamic SimulationlegendsamNo ratings yet
- Frequency Domain Fatigue Assessment of Vehicle Key Support Structures Under Random Load SpectrumDocument8 pagesFrequency Domain Fatigue Assessment of Vehicle Key Support Structures Under Random Load Spectrumruiqiang790903No ratings yet
- Comparative Study of Sensorless Control Methods of PMSM DrivesDocument23 pagesComparative Study of Sensorless Control Methods of PMSM DrivesVinh LeNo ratings yet
- Of Induction Motor Using Artificial Neural Network and Implementation in MATLABDocument54 pagesOf Induction Motor Using Artificial Neural Network and Implementation in MATLABnareshreddy136100% (1)
- Hiroaki HOSHINO - Simulation On Synchronization MechanismDocument8 pagesHiroaki HOSHINO - Simulation On Synchronization Mechanismelah1No ratings yet
- Comparative Analysis of Vehicle Suspension System in Matlab-Simulink and Msc-Adams With The Help of Quarter Car ModelDocument8 pagesComparative Analysis of Vehicle Suspension System in Matlab-Simulink and Msc-Adams With The Help of Quarter Car ModelHemanth KrishnaNo ratings yet
- (23540192 - Mechanics and Mechanical Engineering) Kinematic and Dynamic Analysis For A New MacPherson Strut Suspension SystemDocument16 pages(23540192 - Mechanics and Mechanical Engineering) Kinematic and Dynamic Analysis For A New MacPherson Strut Suspension SystemIulian NgiNo ratings yet
- Simulation of Passive and Active SuspensionDocument9 pagesSimulation of Passive and Active SuspensionAshish Parihar100% (1)
- Suspension AnalysisDocument6 pagesSuspension AnalysisAnonymous 8plFyOLxNo ratings yet
- 10 1 1 554 2000Document7 pages10 1 1 554 2000Amir Ali JanbakhshNo ratings yet
- Active Suspension System Energy Control 2009 IFAC Proceedings VolumesDocument7 pagesActive Suspension System Energy Control 2009 IFAC Proceedings VolumesKeneni AlemayehuNo ratings yet
- Normalized Dynamic Simulation of 3-Phase Induction Motor Using Matlab/SimulinkDocument6 pagesNormalized Dynamic Simulation of 3-Phase Induction Motor Using Matlab/SimulinkMallikarjunBhiradeNo ratings yet
- Space Vector Flux Weakening Control of PMSM DriverDocument8 pagesSpace Vector Flux Weakening Control of PMSM DriverOsama AttookNo ratings yet
- The Simulation of Switched Reluctance Motor With The Rapid Nonlinear MethodDocument5 pagesThe Simulation of Switched Reluctance Motor With The Rapid Nonlinear MethodFairul AzharNo ratings yet
- Model Reference Adaptive Control Based Parameters Estimation of Permanent Magnet Synchronous Motor DriveDocument9 pagesModel Reference Adaptive Control Based Parameters Estimation of Permanent Magnet Synchronous Motor DriveInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Time Delays May Come From The Retardation of Either A Controller or An Actuator inDocument6 pagesTime Delays May Come From The Retardation of Either A Controller or An Actuator inpankaj arvikarNo ratings yet
- Design of A Bearingless BLDC MotorDocument6 pagesDesign of A Bearingless BLDC MotorTien Dung TranNo ratings yet
- Meyer 2012 Quad Rotor SimulationDocument12 pagesMeyer 2012 Quad Rotor SimulationNicolás Ilich SamusNo ratings yet
- Model of Anti Roll Back System On Hilling Situation in Car-29317Document4 pagesModel of Anti Roll Back System On Hilling Situation in Car-29317kanchan boneNo ratings yet
- Mr. Swetansh M. ShrivastavaDocument16 pagesMr. Swetansh M. Shrivastavakanchan boneNo ratings yet
- Solar Tracker With Stepper Motor Control Using MicrocontrollerDocument2 pagesSolar Tracker With Stepper Motor Control Using Microcontrollerieee4mybusinessonly100% (1)
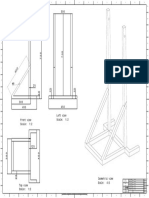
- FrameDocument1 pageFramesuraj dhulannavarNo ratings yet
- 1:1 XXX A4: Toshavi 4/8/2016Document1 page1:1 XXX A4: Toshavi 4/8/2016suraj dhulannavarNo ratings yet
- Ratchets 0101Document1 pageRatchets 0101kanchan boneNo ratings yet
- Patil 2016Document5 pagesPatil 2016kanchan boneNo ratings yet
- Four Way Hacksaw All CalculationDocument4 pagesFour Way Hacksaw All Calculationkanchan bone80% (5)
- Detailed Project Report ON: Hybrid Solar Tray Dryer - 96 TraysDocument47 pagesDetailed Project Report ON: Hybrid Solar Tray Dryer - 96 Trayskanchan boneNo ratings yet
- Hill Station Breaking SystemDocument48 pagesHill Station Breaking Systemkanchan bone80% (5)
- 1210 5973Document17 pages1210 5973giridharsinghNo ratings yet
- YyyyyyyyyyyyyyyyyyyyyyyyyDocument6 pagesYyyyyyyyyyyyyyyyyyyyyyyyykanchan boneNo ratings yet
- 1210 5973Document17 pages1210 5973giridharsinghNo ratings yet
- 978 1 58503 581 6 6Document21 pages978 1 58503 581 6 6Saravanan Srvn TNo ratings yet
- Head Light 1 PDFDocument5 pagesHead Light 1 PDFkanchan boneNo ratings yet
- Mini Report-Reverse Braking SystemDocument25 pagesMini Report-Reverse Braking Systemkanchan boneNo ratings yet
- Head Li8 + Hand Brake With CalculationsDocument32 pagesHead Li8 + Hand Brake With Calculationskanchan boneNo ratings yet
- Material Selection Method in Design of Automotive Brake DiscDocument5 pagesMaterial Selection Method in Design of Automotive Brake Discgustavitolp87No ratings yet
- Ecsecuritybased-Safety Auto Brake System For Hill Station Vehicle Using Mems Sensor.Document3 pagesEcsecuritybased-Safety Auto Brake System For Hill Station Vehicle Using Mems Sensor.kanchan bone100% (1)
- Fabrication of Electro Hydraulic Jack: International Research Journal of Engineering and Technology (IRJET)Document5 pagesFabrication of Electro Hydraulic Jack: International Research Journal of Engineering and Technology (IRJET)kanchan boneNo ratings yet
- Interpolation Of: Course No: CEE137 Course Name: Numerical AnalysisDocument4 pagesInterpolation Of: Course No: CEE137 Course Name: Numerical AnalysisMishkat Ahmed NaoshadNo ratings yet
- Mit AcpuDocument30 pagesMit AcpuThanhtung DangNo ratings yet
- 5 Barriers To Mobile Financial Services in BangladeshDocument2 pages5 Barriers To Mobile Financial Services in BangladeshFarjana Hossain DharaNo ratings yet
- BAPI EnhancementDocument6 pagesBAPI EnhancementSathish B SathishNo ratings yet
- BitcoinDocument2 pagesBitcoinnonsme2No ratings yet
- Global Sourcing OptionsDocument25 pagesGlobal Sourcing OptionsKazi ZamanNo ratings yet
- Hyg042n10ns1p Hyg042n10ns1bDocument10 pagesHyg042n10ns1p Hyg042n10ns1brennybenitezNo ratings yet
- Amd Nvme/Sata Raid Quick Start Guide For Windows Operating SystemsDocument21 pagesAmd Nvme/Sata Raid Quick Start Guide For Windows Operating SystemsStanford AdderleyNo ratings yet
- PHD Thesis Big DataDocument7 pagesPHD Thesis Big Datacarolynostwaltbillings100% (2)
- Autocad Daywise - SyllabusDocument1 pageAutocad Daywise - SyllabusAmal_YaguNo ratings yet
- Related StudiesDocument8 pagesRelated StudiesZoe Bantilan MirandoNo ratings yet
- DX DiagDocument40 pagesDX DiagRadith FitriansyahNo ratings yet
- GHMC Occupany CertificateDocument2 pagesGHMC Occupany CertificateRohit Jain67% (3)
- Digital Multimeter: Instruction ManualDocument1 pageDigital Multimeter: Instruction Manualphuong leNo ratings yet
- Digital Platforms PI4 - Planning IntroductionDocument40 pagesDigital Platforms PI4 - Planning IntroductionMANUEL ANTONIO AVALOS ROSASNo ratings yet
- SAP Interview QuestionsDocument11 pagesSAP Interview QuestionsKiran KumarNo ratings yet
- Programming MCQ: Practice and DiscussionDocument39 pagesProgramming MCQ: Practice and Discussionshenbagaraman cseNo ratings yet
- Intellectual Property Litigation Risk ReportDocument24 pagesIntellectual Property Litigation Risk ReportPankaj GargNo ratings yet
- Nikhleshwar CTS Oracle CVDocument7 pagesNikhleshwar CTS Oracle CVShikhar GangradeNo ratings yet