You might also like
- Design Guide - Users Guide - Design and Load Rating PDFDocument206 pagesDesign Guide - Users Guide - Design and Load Rating PDFGustavo Solar100% (2)
- Pressure Vessel Engineering LTD.: Finite Element Analysis Report - VIII-2Document23 pagesPressure Vessel Engineering LTD.: Finite Element Analysis Report - VIII-2rahulNo ratings yet
- MIL-HDBK Combination Locks (1989!12!31)Document66 pagesMIL-HDBK Combination Locks (1989!12!31)Tyra SmithNo ratings yet
- G. K. Kharate: Principal Matoshri College of Engineering and Research Centre NashikDocument55 pagesG. K. Kharate: Principal Matoshri College of Engineering and Research Centre NashikJALLU SANTOSHI MRUDULANo ratings yet
- RATES For 2073-74: A. Approved Labour RateDocument40 pagesRATES For 2073-74: A. Approved Labour Rateक्षितिज चौलागाईंNo ratings yet
- Tutorial: FE Simulation of Orthogonal Cutting in Abaqus/explicit Problem StatementDocument17 pagesTutorial: FE Simulation of Orthogonal Cutting in Abaqus/explicit Problem StatementYashika GuptaNo ratings yet
- Wrapped Thick Cylinder Under Pressure and Thermal LoadingDocument5 pagesWrapped Thick Cylinder Under Pressure and Thermal LoadingDan WolfNo ratings yet
- Crane BUS BAR - Technical DataDocument56 pagesCrane BUS BAR - Technical DataJahanzaib MughalNo ratings yet
- SMD SolderingDocument18 pagesSMD SolderingRizwan Tanveer100% (2)
- Equipment Components Catalog: VG Perfiles, C.ADocument17 pagesEquipment Components Catalog: VG Perfiles, C.AJesus RuizNo ratings yet
- Chapter 69: Simulation of Fuel Tank FillingDocument16 pagesChapter 69: Simulation of Fuel Tank FillingDan WolfNo ratings yet
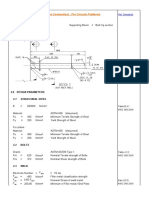
- Cleat Connection For PlatformsDocument29 pagesCleat Connection For PlatformsRajveer SinghNo ratings yet
- Bobcat 963 Skid Steer Loader Master Illustrated Parts List Manual Book G SeriesDocument409 pagesBobcat 963 Skid Steer Loader Master Illustrated Parts List Manual Book G Seriesjakecall73% (11)
- GM 4.3L Manual DesarmeDocument0 pagesGM 4.3L Manual DesarmeLuis Carlos Acosta100% (1)
- Outline Design Specification of Phase IV (March 2019) 01042019 PDFDocument164 pagesOutline Design Specification of Phase IV (March 2019) 01042019 PDFBilal A BarbhuiyaNo ratings yet
- MD Nastran Demonstration Problems 2010Document1,347 pagesMD Nastran Demonstration Problems 2010Dan WolfNo ratings yet
- Steel BS Parameter PDFDocument8 pagesSteel BS Parameter PDFdpkNo ratings yet
- Parts Information: Contact-Cooled Rotary Screw Air CompressorDocument124 pagesParts Information: Contact-Cooled Rotary Screw Air CompressorDouglas AlexandreNo ratings yet
- Mar 103 Experimental Elastomer AnalysisDocument308 pagesMar 103 Experimental Elastomer AnalysisDan Wolf100% (1)
- Question PDFDocument12 pagesQuestion PDFjushwanth100% (1)
- Install Gas Separator 2.6Document3 pagesInstall Gas Separator 2.6Bombasticos FcNo ratings yet
- Corona RT 46 164 SimpleDocument94 pagesCorona RT 46 164 SimpleRimbert100% (1)
- Chapter 28: Model Airplane AnalysisDocument10 pagesChapter 28: Model Airplane Analysisirina_andraNo ratings yet
- Programmable Logic DevicesDocument50 pagesProgrammable Logic Devicesanon_463330020No ratings yet
- SQUDFY212200052 - TPDDL & DTL - 33,66 & 220kV DC - Technical Offer DetailsDocument9 pagesSQUDFY212200052 - TPDDL & DTL - 33,66 & 220kV DC - Technical Offer DetailsSUJAL SHAH - SKIPPER LIMITEDNo ratings yet
- Dhanalakshmi Srinivasan Engineering College PERAMBALUR-621212Document7 pagesDhanalakshmi Srinivasan Engineering College PERAMBALUR-621212Kalai ArasanNo ratings yet
- Guidelines Surface Mount Technology SMT Soldering Application Note MelexisDocument62 pagesGuidelines Surface Mount Technology SMT Soldering Application Note Melexisengenhariatip1No ratings yet
- GroupD ManualDocument24 pagesGroupD ManualTerminal VelocityNo ratings yet
- Mechanical Engineering Design Chapter 8 CompressDocument24 pagesMechanical Engineering Design Chapter 8 Compressfog900No ratings yet
- Mechanical Engineering Design Chapter 8 CompressDocument24 pagesMechanical Engineering Design Chapter 8 Compressfog900No ratings yet
- REH984b A 81r2c4zg6yDocument131 pagesREH984b A 81r2c4zg6ymahesh1shrimali-1No ratings yet
- Dem20485syh LyDocument14 pagesDem20485syh Lyflo72afNo ratings yet
- Applying IGBT and Diode Dies - 5SYA 2059-04Document12 pagesApplying IGBT and Diode Dies - 5SYA 2059-04FarnazNo ratings yet
- Product Profile: 550 MHZ, 22 DB Gain Push-Pull AmplifierDocument8 pagesProduct Profile: 550 MHZ, 22 DB Gain Push-Pull Amplifierjorge enriqueNo ratings yet
- FX Idc1b Kidde Manual InstalacionDocument2 pagesFX Idc1b Kidde Manual InstalacionAlexander Barrera SanchezNo ratings yet
- 4 - Column DesignDocument10 pages4 - Column Designlarry0lao0iiiNo ratings yet
- MBCIDocument10 pagesMBCIbauhaus10No ratings yet
- Design and Analysis of Knuckle Joint by Using Solid Edge and Ansys IJERTCONV10IS11021Document3 pagesDesign and Analysis of Knuckle Joint by Using Solid Edge and Ansys IJERTCONV10IS11021Pacy Mugisho100% (1)
- Ball Joint Rubber BootDocument10 pagesBall Joint Rubber BootDan WolfNo ratings yet
- Transductor Lineal Balluff Perfil Ethernet IP PDFDocument19 pagesTransductor Lineal Balluff Perfil Ethernet IP PDFGerardo Cruz EspinosaNo ratings yet
- Manual de Instrução Drive DCD - 1Document48 pagesManual de Instrução Drive DCD - 1aldeirtrabalho001No ratings yet
- Predicting Lifetime PCB IpcDocument30 pagesPredicting Lifetime PCB IpcJose LopezNo ratings yet
- Ba Btl7 v50t M AbyzDocument20 pagesBa Btl7 v50t M AbyzMatej CvetkoNo ratings yet
- Slot Optimization Design of Induction Motor For Electric VehicleDocument8 pagesSlot Optimization Design of Induction Motor For Electric VehicleAnuroopNo ratings yet
- Release Notes SAP2000 V 2200Document6 pagesRelease Notes SAP2000 V 2200padeepNo ratings yet
- Dem 20487 Syh-LyDocument14 pagesDem 20487 Syh-LyPreda AndreiNo ratings yet
- Assignement1 2024Document3 pagesAssignement1 2024zhuo.hao.wangNo ratings yet
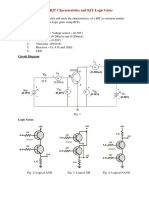
- BJT Characteristics and ApplicationsDocument3 pagesBJT Characteristics and ApplicationsAditi Kadam100% (1)
- Batron BTHQ128064AVG COG FFEMN 06 LEDWHITE DatasheetDocument31 pagesBatron BTHQ128064AVG COG FFEMN 06 LEDWHITE Datasheetrogeriop1986No ratings yet
- Description and Application Manual: For 2SB315B SCALE Dual-Channel Plug-And-Play IGBT DriversDocument17 pagesDescription and Application Manual: For 2SB315B SCALE Dual-Channel Plug-And-Play IGBT Driversfenix1233No ratings yet
- 36-00-012C Design Review - ReliabilityDocument184 pages36-00-012C Design Review - ReliabilityDavid KeilNo ratings yet
- Chapter 7 ReDocument18 pagesChapter 7 ReJohnson AnthonyNo ratings yet
- SAP2000 Analysis Report: License #2010 1KU4BH288P9NHNJDocument7 pagesSAP2000 Analysis Report: License #2010 1KU4BH288P9NHNJmauriciotrochesaNo ratings yet
- EN315-06 Layout Design RuleDocument64 pagesEN315-06 Layout Design Rulepreet786No ratings yet
- Antminer S17plus Repair Guide - ZH CN - enDocument16 pagesAntminer S17plus Repair Guide - ZH CN - enPaulo RodriguesNo ratings yet
- ACI 318 Stiffness ModifierDocument1 pageACI 318 Stiffness ModifierEspn SachinNo ratings yet
- Design Load Basis Report Tensile Canopy - Vedvan - Noida - R0Document27 pagesDesign Load Basis Report Tensile Canopy - Vedvan - Noida - R0Neeraj KumarNo ratings yet
- EE8552 Power ElectronicsDocument13 pagesEE8552 Power ElectronicsAbhishekNo ratings yet
- Combinatio Nal Logic: Design & Analysis of VLSI SystemDocument9 pagesCombinatio Nal Logic: Design & Analysis of VLSI Systemnajmun_cseduNo ratings yet
- BT45231 Display ManualDocument16 pagesBT45231 Display ManualSaravanan Veerayah JayaramanNo ratings yet
- BS 2M 63-1993 (2010) Iso 7320-1992Document12 pagesBS 2M 63-1993 (2010) Iso 7320-1992dokuNo ratings yet
- Fuji Igbt Modules Application Manual: March 2015Document132 pagesFuji Igbt Modules Application Manual: March 2015kukuh sandyNo ratings yet
- Standard Information: Standards Update Notice (Sun) ISSUED: April 5, 2021Document4 pagesStandard Information: Standards Update Notice (Sun) ISSUED: April 5, 2021Mladen MilicevicNo ratings yet
- HD67 Service Manual (DDP2431) V1.0Document37 pagesHD67 Service Manual (DDP2431) V1.0Bartolo PelaezNo ratings yet
- Storage Shelf ComputationDocument12 pagesStorage Shelf ComputationRay Alvin RambacNo ratings yet
- Sil-B: Feeder Protection Relay For Primary DistributionDocument6 pagesSil-B: Feeder Protection Relay For Primary DistributionTeban MartinekNo ratings yet
- Sn74ahc1g09 q1Document19 pagesSn74ahc1g09 q1Kobalt667 AzraelNo ratings yet
- Vtv-3281-Lit-9511-Pp-Doc-052 - Rev 0Document14 pagesVtv-3281-Lit-9511-Pp-Doc-052 - Rev 0VIVEK TIWARINo ratings yet
- How To Design An R Resistor For A Vishay Trench PT IGBT: RectifiersDocument12 pagesHow To Design An R Resistor For A Vishay Trench PT IGBT: RectifiersHoangNo ratings yet
- Digsilent Powerfactory: Relay Model DescriptionDocument12 pagesDigsilent Powerfactory: Relay Model DescriptionBra BicabaNo ratings yet
- PC200 Control Box: User ManualDocument12 pagesPC200 Control Box: User ManualReVinJazon100% (2)
- Token Ring Technology ReportFrom EverandToken Ring Technology ReportNo ratings yet
- Convection Correlations For PCBDocument12 pagesConvection Correlations For PCBDan WolfNo ratings yet
- Beam Reinforced Shell Structure Using OffsetsDocument12 pagesBeam Reinforced Shell Structure Using OffsetsDan WolfNo ratings yet
- User Defined Subroutines For Heat Transfer CoefficientDocument13 pagesUser Defined Subroutines For Heat Transfer CoefficientDan WolfNo ratings yet
- Deformable Baffle in A Duct Using OpenFSIDocument4 pagesDeformable Baffle in A Duct Using OpenFSIDan WolfNo ratings yet
- Chapter 57: Heating and Convection On A Plate For Heat ExchangerDocument12 pagesChapter 57: Heating and Convection On A Plate For Heat ExchangerDan WolfNo ratings yet
- Chapter 58: Coupled Advection For Heat ExchangerDocument11 pagesChapter 58: Coupled Advection For Heat ExchangerDan WolfNo ratings yet
- Marc 2010 User's GuideDocument1,946 pagesMarc 2010 User's GuideDan Wolf100% (1)
- Plastic Spur Gear Pair FailureDocument14 pagesPlastic Spur Gear Pair FailureDan Wolf100% (1)
- Shallow Cylindrical Shell Snap-ThroughDocument9 pagesShallow Cylindrical Shell Snap-ThroughDan WolfNo ratings yet
- Impact of A Rigid On Composite Laminate Using GENOA PFA MaterialDocument7 pagesImpact of A Rigid On Composite Laminate Using GENOA PFA MaterialDan Wolf100% (1)
- Girkmann Problem Using Axisymmetric Shell ElementsDocument9 pagesGirkmann Problem Using Axisymmetric Shell ElementsDan WolfNo ratings yet
- Bilinear Friction Model: Sliding WedgeDocument7 pagesBilinear Friction Model: Sliding WedgeDan WolfNo ratings yet
- 2-D Cylindrical Roller ContactDocument51 pages2-D Cylindrical Roller ContactDan Wolf100% (1)
- 3-D Sheet Metal FormingDocument15 pages3-D Sheet Metal FormingDan WolfNo ratings yet
- w03 Break Forming Mar101Document38 pagesw03 Break Forming Mar101Dan WolfNo ratings yet
- w03 Break Forming Mar101vDocument2 pagesw03 Break Forming Mar101vDan WolfNo ratings yet
- Tube FlaringDocument7 pagesTube FlaringDan WolfNo ratings yet
- Three-Layer Sandwich Shell Under Normal Pressure LoadingDocument6 pagesThree-Layer Sandwich Shell Under Normal Pressure LoadingDan WolfNo ratings yet
- Double-Sided ContactDocument49 pagesDouble-Sided ContactDan WolfNo ratings yet
- Elastic-Plastic Collapse of A Cylindrical Pipe Under External Rigid Body LoadingDocument66 pagesElastic-Plastic Collapse of A Cylindrical Pipe Under External Rigid Body LoadingDan WolfNo ratings yet
- Ball Joint Rubber BootDocument10 pagesBall Joint Rubber BootDan WolfNo ratings yet
- Time NVH Analysis - Chassis ExampleDocument9 pagesTime NVH Analysis - Chassis ExampleDan WolfNo ratings yet
- Laminated Strip Under Three-Point BendingDocument6 pagesLaminated Strip Under Three-Point BendingDan WolfNo ratings yet
- Cup Forming SimulationDocument10 pagesCup Forming SimulationDan WolfNo ratings yet
- Series 5000B4 ManualDocument17 pagesSeries 5000B4 ManualJohn Jairo Simanca CastilloNo ratings yet
- Technical Specification:: A3-SIZE 121023Document4 pagesTechnical Specification:: A3-SIZE 121023MIHAINo ratings yet
- Xyratex RS-1220-F4-5412E & RS-1220-E3-XPN Quick Start GuideDocument4 pagesXyratex RS-1220-F4-5412E & RS-1220-E3-XPN Quick Start GuideAdam Van HarenNo ratings yet
- Tech Data SheetDocument6 pagesTech Data Sheetali omarNo ratings yet
- Procedure Line Release After MaintenanceDocument2 pagesProcedure Line Release After MaintenanceWilson Atehortua100% (1)
- Test MA5-Technical DrawingDocument5 pagesTest MA5-Technical DrawingPuwa CalvinNo ratings yet
- 343 Tender Hardware ItemsDocument106 pages343 Tender Hardware Itemssolid_impact100% (1)
- Mits97 Ingles Nov02Document46 pagesMits97 Ingles Nov02milad rouhiniaNo ratings yet
- 350 SX-F Cairoli Replica 2012: Spare Parts Manual: ChassisDocument36 pages350 SX-F Cairoli Replica 2012: Spare Parts Manual: ChassischarlesNo ratings yet
- Alfa159 Fuel - ModDocument32 pagesAlfa159 Fuel - ModModise Thee Shepherd MofokengNo ratings yet
- Logo XxtreamDocument25 pagesLogo Xxtreamgino barnabaNo ratings yet
- Resumen MaterialesDocument20 pagesResumen MaterialesLorenzoNo ratings yet
- Model MH: Parts List ForDocument8 pagesModel MH: Parts List FormhafizanNo ratings yet
- SpareParts F1 T1Document34 pagesSpareParts F1 T1memak456No ratings yet
- Sand Probe InstructionsDocument13 pagesSand Probe InstructionsMohammed YusufNo ratings yet
- Lamella Roof PluginDocument7 pagesLamella Roof PluginNishant PrakharNo ratings yet
- Maintenance ManualDocument10 pagesMaintenance ManualAbo MohammedNo ratings yet
- Conquas 2005Document65 pagesConquas 2005Anonymous p2cFoXbjDNo ratings yet
- Perfiles de Aluminio TSLOTSDocument259 pagesPerfiles de Aluminio TSLOTSRitchie_rios_91No ratings yet
- Interior Non-Load Bearing Partition Bracing Option: NWCB Technical DocumentDocument2 pagesInterior Non-Load Bearing Partition Bracing Option: NWCB Technical DocumentClaudio ColettaNo ratings yet