You might also like
- It1252 Digital Signal ProcessingDocument22 pagesIt1252 Digital Signal ProcessingainugiriNo ratings yet
- Introduction to Discrete-Time Signals and SystemsDocument9 pagesIntroduction to Discrete-Time Signals and SystemsLyubomir HristovNo ratings yet
- Digital Signal Processing Important 2 Two Mark Question and Answer IT 1252Document14 pagesDigital Signal Processing Important 2 Two Mark Question and Answer IT 1252startedforfunNo ratings yet
- Digital Signal Processing Question Bank 01Document37 pagesDigital Signal Processing Question Bank 01Mathi YuvarajanNo ratings yet
- Digital Signal Processing Question Bank 02Document24 pagesDigital Signal Processing Question Bank 02Mathi YuvarajanNo ratings yet
- CT and DT Signals, Systems and PropertiesDocument69 pagesCT and DT Signals, Systems and PropertiesSivaKumar AnandanNo ratings yet
- Intro to Digital Signal ProcessingDocument15 pagesIntro to Digital Signal Processingvimalaspl7831No ratings yet
- Unit I - Discrete Fourier Transform Part - ADocument10 pagesUnit I - Discrete Fourier Transform Part - AindhuNo ratings yet
- Discrete-Time Signals & SystemsDocument83 pagesDiscrete-Time Signals & SystemsSHAHRIAR MAHMUD SABUJ 1604013No ratings yet
- 2 Marks - CseDocument20 pages2 Marks - CserdjeyanNo ratings yet
- SelvamDocument40 pagesSelvamgopiphdNo ratings yet
- Signals and Systems - Unit - IDocument13 pagesSignals and Systems - Unit - Iohmshankar100% (3)
- 2 Marks Questions & Answers: Cs-73 Digital Signal Processing Iv Year / Vii Semester CseDocument18 pages2 Marks Questions & Answers: Cs-73 Digital Signal Processing Iv Year / Vii Semester CsehariharankalyanNo ratings yet
- DSP Qs 2marksDocument36 pagesDSP Qs 2marksanon_624151290No ratings yet
- IT 1252 - Digital Signal ProcessingDocument22 pagesIT 1252 - Digital Signal Processinganon-384794100% (3)
- Digital Signal Processing: 2 Marks & Question-AnswersDocument30 pagesDigital Signal Processing: 2 Marks & Question-AnswerssridharanchandranNo ratings yet
- Semeste1 DSP Lec2Document15 pagesSemeste1 DSP Lec2صوت التمارNo ratings yet
- dsp1 PDFDocument5 pagesdsp1 PDFNikhilNo ratings yet
- Ec3354-Signals and Systems-858759966-Ss QB - 2023-06-10T151453.626Document41 pagesEc3354-Signals and Systems-858759966-Ss QB - 2023-06-10T151453.626Music LoverNo ratings yet
- Digital Signal ProcessingDocument22 pagesDigital Signal Processingtdhinakaran100% (1)
- Ni Two Marks - NewDocument37 pagesNi Two Marks - NewAnuishuya SugumaranNo ratings yet
- 1 Kundur IntroDSP HandoutsDocument13 pages1 Kundur IntroDSP HandoutsMuhammad Usman IqbalNo ratings yet
- Chapter 02Document33 pagesChapter 02Taiyeb Hasan SakibNo ratings yet
- DSP Chapter 2 Part 1Document45 pagesDSP Chapter 2 Part 1api-26581966100% (1)
- ECE438 - Laboratory 2: Discrete-Time SystemsDocument6 pagesECE438 - Laboratory 2: Discrete-Time SystemsMusie WeldayNo ratings yet
- DTSSP QBDocument37 pagesDTSSP QBgeetha657595No ratings yet
- 1.1. Discrete-Time Signals and Systems. Basic DefinitionsDocument11 pages1.1. Discrete-Time Signals and Systems. Basic DefinitionsNirmal Kumar PandeyNo ratings yet
- Digital Signal Processing Lecture+5,+January+20thDocument36 pagesDigital Signal Processing Lecture+5,+January+20thGASR2017No ratings yet
- DSP 2 Marks PDFDocument18 pagesDSP 2 Marks PDFPavithra MohanNo ratings yet
- Try To Refer Ramesh Babu Book 1Document11 pagesTry To Refer Ramesh Babu Book 1sukeshsrkNo ratings yet
- Ec8352-Signals and SystemsDocument13 pagesEc8352-Signals and Systemsazhagank28062003No ratings yet
- CH 05Document31 pagesCH 05KavunNo ratings yet
- B.Suresh Kumar Ap/Ece Tkec Ec6502 PDSP Two MarksDocument14 pagesB.Suresh Kumar Ap/Ece Tkec Ec6502 PDSP Two MarksSuresh KumarNo ratings yet
- Uploads 1Document29 pagesUploads 1MnshNo ratings yet
- Ee6403 DTSP123Document12 pagesEe6403 DTSP123VijayNo ratings yet
- Mumbai University DTSP EXTC Viva Questions AnswersDocument36 pagesMumbai University DTSP EXTC Viva Questions AnswersPritam KadamNo ratings yet
- KL University, Vaddeswaram, Dept. of Ece B. Tech (All Branches), Iind Year, Sem-1 Test-1 Solutions, Signal Processing-13-Es205 Max Marks 30Document6 pagesKL University, Vaddeswaram, Dept. of Ece B. Tech (All Branches), Iind Year, Sem-1 Test-1 Solutions, Signal Processing-13-Es205 Max Marks 30Sai RanadheerNo ratings yet
- Digital Signal Processing Important Two Mark Questions With AnswersDocument15 pagesDigital Signal Processing Important Two Mark Questions With AnswerssaiNo ratings yet
- Unit I: Discrete Time Signals and Systems: Dr. Raghu Indrakanti, Ph.D. Assistant Professor E.C.E DepartmentDocument47 pagesUnit I: Discrete Time Signals and Systems: Dr. Raghu Indrakanti, Ph.D. Assistant Professor E.C.E Departmentanil kumarNo ratings yet
- Digital Image ProcessingDocument23 pagesDigital Image ProcessingHamza KaleemNo ratings yet
- DSP Discrete Time Systems & Signal Processing NotesDocument19 pagesDSP Discrete Time Systems & Signal Processing Notessyed ibrahimNo ratings yet
- Digital Signal Processing-EeeDocument24 pagesDigital Signal Processing-EeesridharanchandranNo ratings yet
- Cs2403 - Digital Signal Processing Unit-I Signals & SystemsDocument18 pagesCs2403 - Digital Signal Processing Unit-I Signals & SystemsSuresh DskNo ratings yet
- 3-Classification of Signals and Systems-05!01!2024Document21 pages3-Classification of Signals and Systems-05!01!2024rupinsgmNo ratings yet
- Ee8591 DSPDocument28 pagesEe8591 DSPtamizh kaviNo ratings yet
- Signals and SystemsDocument22 pagesSignals and Systemsvnrao61No ratings yet
- Unit I: Classification of SignalsDocument22 pagesUnit I: Classification of SignalsAmit SangaleNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Instruments and MeasurementsFrom EverandInstruments and MeasurementsBirger QvarnstromNo ratings yet
- Applications of Derivatives Errors and Approximation (Calculus) Mathematics Question BankFrom EverandApplications of Derivatives Errors and Approximation (Calculus) Mathematics Question BankNo ratings yet
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- Ordinary Differential Equations and Stability Theory: An IntroductionFrom EverandOrdinary Differential Equations and Stability Theory: An IntroductionNo ratings yet
- EEG ArtifactsDocument1 pageEEG ArtifactsMuhammad Tariq SadiqNo ratings yet
- Ex 1 1 FSC Part2Document11 pagesEx 1 1 FSC Part2Saher BanoNo ratings yet
- Stress Management Techniques for Students and ProfessionalsDocument6 pagesStress Management Techniques for Students and ProfessionalsMuhammad Tariq SadiqNo ratings yet
- Survive Your PHD Ebook PDFDocument35 pagesSurvive Your PHD Ebook PDFMuhammad Tariq SadiqNo ratings yet
- Opimization Chapter 2 by DEB PDFDocument44 pagesOpimization Chapter 2 by DEB PDFMuhammad Tariq SadiqNo ratings yet
- 1 Laplace Transform: 1.1 de NitionsDocument5 pages1 Laplace Transform: 1.1 de NitionsMuhammad Tariq SadiqNo ratings yet
- Course OutlineDocument2 pagesCourse OutlineMuhammad Tariq SadiqNo ratings yet
- Description of Systems: M. J. Roberts All Rights Reserved. Edited by Dr. Robert AklDocument43 pagesDescription of Systems: M. J. Roberts All Rights Reserved. Edited by Dr. Robert AklFaraz HumayunNo ratings yet
- Chapter 3Document35 pagesChapter 3Faraz HumayunNo ratings yet
- FourierDocument5 pagesFourierMuhammad Tariq SadiqNo ratings yet
- Changing Our Ways of Supervising Part-Ti PDFDocument12 pagesChanging Our Ways of Supervising Part-Ti PDFMuhammad Tariq SadiqNo ratings yet
- FinalDocument10 pagesFinalMuhammad Tariq SadiqNo ratings yet
- Test Exam 2 May 11 Complex Analysis and Transforms, MA1305Document1 pageTest Exam 2 May 11 Complex Analysis and Transforms, MA1305Muhammad Tariq SadiqNo ratings yet
- 1 Complex Analysis: 1.1 Analytic FunctionsDocument15 pages1 Complex Analysis: 1.1 Analytic FunctionsMuhammad Tariq SadiqNo ratings yet
- Merging man and maths: Laws and formulas for trianglesDocument1 pageMerging man and maths: Laws and formulas for trianglesVsr ReddyNo ratings yet
- Newtons MethodDocument8 pagesNewtons MethodMuhammad Tariq SadiqNo ratings yet
- CalcI Derivatives AppsDocument107 pagesCalcI Derivatives AppsVic Rizenn Isidore BobilesNo ratings yet
- Newtons MethodDocument8 pagesNewtons MethodMuhammad Tariq SadiqNo ratings yet
- Date Shee Ms New - Fall 15 Final TermDocument1 pageDate Shee Ms New - Fall 15 Final TermMuhammad Tariq SadiqNo ratings yet
- NetworkcompleteDocument121 pagesNetworkcompleteAshok SharmaNo ratings yet
- The Two-Phase Simplex MethodDocument22 pagesThe Two-Phase Simplex Methodbhoopesh2688No ratings yet
- MmWave Mobile Communications For 5GDocument15 pagesMmWave Mobile Communications For 5GAsghar FarhadiNo ratings yet
- Lec 17,18Document22 pagesLec 17,18Muhammad Tariq SadiqNo ratings yet
- Filter DesignDocument75 pagesFilter DesignMuhammad Tariq SadiqNo ratings yet
- Assignment 01 QuestionsDocument2 pagesAssignment 01 QuestionsMuhammad Tariq SadiqNo ratings yet
- DSP Homework #1 - Plot Discrete Signals & Find PeriodsDocument3 pagesDSP Homework #1 - Plot Discrete Signals & Find PeriodsMuhammad Tariq SadiqNo ratings yet
- Ports For TorrentsDocument1 pagePorts For TorrentsMuhammad Tariq SadiqNo ratings yet
- Ch7.1klystron 2Document6 pagesCh7.1klystron 2Fahad PirachaNo ratings yet
- Software Testing by NithinbobDocument25 pagesSoftware Testing by NithinbobNayaz UddinNo ratings yet
- Fractal TalkDocument62 pagesFractal TalkjasimNo ratings yet
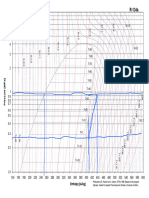
- R134a - DiagramDocument1 pageR134a - DiagramDulce Rosales JardonNo ratings yet
- Pavan Kumar 1Document8 pagesPavan Kumar 1Anji ChNo ratings yet
- Process Monitoring NonconformityDocument160 pagesProcess Monitoring Nonconformityshobha shelarNo ratings yet
- Molding Department Equivalent Production Computations Month of June MaterialsDocument5 pagesMolding Department Equivalent Production Computations Month of June MaterialsGwyneth Jhane Ybañez LibosadaNo ratings yet
- Continuous DeploymentDocument2 pagesContinuous Deploymentarun challaNo ratings yet
- AI CH 2Document27 pagesAI CH 2Antehun asefaNo ratings yet
- Software Quality Assurance - For - AppraisalDocument5 pagesSoftware Quality Assurance - For - AppraisalPravin ThoratNo ratings yet
- Introduction to Mechatronics SystemsDocument27 pagesIntroduction to Mechatronics SystemsYuneo NurcahyaNo ratings yet
- Dynamic Bus Management System Using ML and IotDocument9 pagesDynamic Bus Management System Using ML and IotGarishtha BhainsoraNo ratings yet
- Kassaye WassieDocument100 pagesKassaye WassieJeji HirboraNo ratings yet
- Outline of ScienceDocument17 pagesOutline of ScienceRidalyn AdrenalynNo ratings yet
- ORGANIZATIONDocument36 pagesORGANIZATIONPrincess Melanie MelendezNo ratings yet
- Multirate Digital Signal Processing Techniques ExplainedDocument11 pagesMultirate Digital Signal Processing Techniques ExplainedNandha KumarNo ratings yet
- Control SystemDocument16 pagesControl SystemChuThếHuânNo ratings yet
- Soft Engin1Document2 pagesSoft Engin1Fernan Mark LayanNo ratings yet
- The Design of Digital PID Controllers UsingDocument4 pagesThe Design of Digital PID Controllers UsingArulrajNo ratings yet
- Ramasser Group Business Analyst Online TrainingDocument4 pagesRamasser Group Business Analyst Online TrainingKenny Paul AdesobaNo ratings yet
- Assignment No1 of System Analysis and Design: Submitted To Submitted byDocument7 pagesAssignment No1 of System Analysis and Design: Submitted To Submitted byAnkur SinghNo ratings yet
- Four Phases of Unified Process with Diagrams and Use Case ModelDocument8 pagesFour Phases of Unified Process with Diagrams and Use Case ModelShri RaamNo ratings yet
- On A New Four-Dimensional Model of Memristor-Based Chaotic Circuit in The Context of Nonsingular Atangana-Baleanu-Caputo OperatorsDocument24 pagesOn A New Four-Dimensional Model of Memristor-Based Chaotic Circuit in The Context of Nonsingular Atangana-Baleanu-Caputo OperatorsRahul VishwakarmaNo ratings yet
- SDLC 1Document24 pagesSDLC 1Kochappen Ipe KumarNo ratings yet
- Bhel JitDocument4 pagesBhel Jitswaroopce100% (2)
- IASC Sector Skill Council Job Role ListDocument6 pagesIASC Sector Skill Council Job Role ListMaruti PatilNo ratings yet
- Carnot CyclesDocument5 pagesCarnot CyclesSyed YousufuddinNo ratings yet
- Feasibility Study On Development of Vision-Comparison of Possible OptionsDocument7 pagesFeasibility Study On Development of Vision-Comparison of Possible Optionsk.nidharaNo ratings yet
- (ELEC3114) Course - OutlineDocument11 pages(ELEC3114) Course - OutlinePeter HoNo ratings yet
- Module THERMO Thermodynamics BEXET 2 BSIT RACT X BMET MT 2 OKDocument124 pagesModule THERMO Thermodynamics BEXET 2 BSIT RACT X BMET MT 2 OKHiraishin JutsuNo ratings yet
- DFX and DFSS How QFD Integrates ThemDocument7 pagesDFX and DFSS How QFD Integrates ThemHarshad KhireNo ratings yet