You might also like
- Bebop Scale BasicsDocument3 pagesBebop Scale BasicsSunil Kamat96% (47)
- Starlet GTDocument38 pagesStarlet GTjavier.abraham100% (13)
- Vampire The Requiem - Strange Dead LoveDocument62 pagesVampire The Requiem - Strange Dead LoveDavid Sharpe100% (12)
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- The Nun's Priest's Tale AnalysisDocument6 pagesThe Nun's Priest's Tale AnalysisAdam ParkerNo ratings yet
- Object PronounsDocument2 pagesObject PronounsLiz PinedaNo ratings yet
- Bulerias by Sabicas PDFDocument7 pagesBulerias by Sabicas PDFe_saNo ratings yet
- Mini Critique: by Galo and CasiñoDocument9 pagesMini Critique: by Galo and CasiñoAngela GaloNo ratings yet
- ChawanExpo Singapore CatalogueDocument151 pagesChawanExpo Singapore CataloguebsupicaNo ratings yet
- FCE: Use of English: Open Cloze ExercisesDocument4 pagesFCE: Use of English: Open Cloze Exercisesteacher fernando70% (10)
- Mixed TensesDocument4 pagesMixed TensesmmarijanamavicNo ratings yet
- Chapter 4 Output PrimitivesDocument50 pagesChapter 4 Output PrimitivesEdward ChachaNo ratings yet
- Unit-3 Scan Line Conversion AlgorithmDocument25 pagesUnit-3 Scan Line Conversion AlgorithmBinod AdhikariNo ratings yet
- Scan Conversion: DDA AlgorithmDocument4 pagesScan Conversion: DDA AlgorithmPiyush MudelaNo ratings yet
- Where To Draw A Line??Document49 pagesWhere To Draw A Line??RajaRaman.GNo ratings yet
- Submitted To Submitted by Kunal Malik 4002: DR - Kiran Malik AP (CSE Dept.)Document43 pagesSubmitted To Submitted by Kunal Malik 4002: DR - Kiran Malik AP (CSE Dept.)Kunal MalikNo ratings yet
- Bressenham's Algorithm Easily ExplainedDocument18 pagesBressenham's Algorithm Easily ExplainedXenulhassanNo ratings yet
- 2.3 Scan Conversion MathDocument27 pages2.3 Scan Conversion MathTiktok IndiaNo ratings yet
- UNIT2Document24 pagesUNIT2IRRITATED OPNo ratings yet
- 2D PRIMITIVES DRAWING ALGORITHMSDocument263 pages2D PRIMITIVES DRAWING ALGORITHMSRaj SankeerthNo ratings yet
- Mod-2, Bresenhams Line Drawing AlgorithmDocument16 pagesMod-2, Bresenhams Line Drawing AlgorithmSachin Varghese0% (1)
- Bresenham's Circle Drawing Algorithm Lab FileDocument59 pagesBresenham's Circle Drawing Algorithm Lab FileVaibhav VermaNo ratings yet
- CG Unit 1 5 NotesDocument352 pagesCG Unit 1 5 Noteslegy86No ratings yet
- CG Unit 1 NotesDocument84 pagesCG Unit 1 NotesNithyasri ArumugamNo ratings yet
- CG Notes All UnitsDocument172 pagesCG Notes All UnitsramalingasaravananNo ratings yet
- Lesson TwonDocument26 pagesLesson TwonLee CangNo ratings yet
- Bresenham's Line Drawing AlgorithmDocument14 pagesBresenham's Line Drawing AlgorithmthirumalaikumaranNo ratings yet
- Midpoint Circle AlgorithmDocument13 pagesMidpoint Circle Algorithmsachin guptaNo ratings yet
- Computer Graphics AssignemnetDocument17 pagesComputer Graphics AssignemnetVinayNo ratings yet
- Output Primitives (Rasterization)Document30 pagesOutput Primitives (Rasterization)Suada Bőw WéěžýNo ratings yet
- CG Unit 1 5 NotesDocument173 pagesCG Unit 1 5 NotesYeshvanthYesh100% (1)
- Graphics ReportDocument20 pagesGraphics ReportAkriti KcNo ratings yet
- L3 - Computer GraphicsDocument34 pagesL3 - Computer GraphicsروابيNo ratings yet
- 1) Compare Raster Scan and Random Scan Display SystemsDocument10 pages1) Compare Raster Scan and Random Scan Display SystemsManvi GourNo ratings yet
- Computer GraphicsDocument18 pagesComputer GraphicsSUKHWINDER SINGHNo ratings yet
- CG Chapter 3Document18 pagesCG Chapter 3rajmaisuria111No ratings yet
- CG1Document8 pagesCG1Pin TuNo ratings yet
- IT6501 Notes RejinpaulDocument109 pagesIT6501 Notes RejinpaulSuraj KumarNo ratings yet
- Chapter 3 - Part 1 (Autosaved)Document38 pagesChapter 3 - Part 1 (Autosaved)Ad ManNo ratings yet
- Experiment: 2: Write A Program To Implement Bresenham Line Generation AlgorithmDocument7 pagesExperiment: 2: Write A Program To Implement Bresenham Line Generation AlgorithmAman TirkeyNo ratings yet
- Unit 3 2D Algorithms - CG - PUDocument15 pagesUnit 3 2D Algorithms - CG - PUrupak dangiNo ratings yet
- CS 2401-Computer Graphics Unit - I: 2D Primitives and Line Drawing AlgorithmsDocument84 pagesCS 2401-Computer Graphics Unit - I: 2D Primitives and Line Drawing AlgorithmsGanga DharanNo ratings yet
- Computer Graphics: Unit - I O P: P LDocument42 pagesComputer Graphics: Unit - I O P: P LNileshIndulkarNo ratings yet
- 2D PRIMITIVESDocument173 pages2D PRIMITIVESArunsankar MuralitharanNo ratings yet
- Unit IiDocument44 pagesUnit IiLee CangNo ratings yet
- Drawing CirclesDocument29 pagesDrawing CirclesKasuvu BharathNo ratings yet
- Computer Graphics Lab ManualDocument114 pagesComputer Graphics Lab ManualKhushbu MauryaNo ratings yet
- Bresenham Line Drawing AlgorithmDocument3 pagesBresenham Line Drawing Algorithmtazusamamiya2No ratings yet
- Chapter 3 Scan ConversionDocument24 pagesChapter 3 Scan ConversionHimanshu GautamNo ratings yet
- Computer Graphics Lab ManualDocument107 pagesComputer Graphics Lab ManualFemilaGoldy79% (14)
- Midpoint Ellipse Drawing AlgorithmDocument48 pagesMidpoint Ellipse Drawing AlgorithmsaiNo ratings yet
- Chapter 4 Computer GraphicsDocument33 pagesChapter 4 Computer Graphicsibrahin mahamedNo ratings yet
- Is It Essential For An Embedded System To Have A User InterfaceDocument12 pagesIs It Essential For An Embedded System To Have A User InterfaceDereje TayeNo ratings yet
- Line Circle AlgorithmDocument33 pagesLine Circle Algorithmaerobala16No ratings yet
- Scan Conversion and Rasterization AlgorithmsDocument19 pagesScan Conversion and Rasterization AlgorithmsLee Chan PeterNo ratings yet
- GraphicsDocument5 pagesGraphicsWhite RockNo ratings yet
- Computer Graphics Circle Drawing TechniquesDocument45 pagesComputer Graphics Circle Drawing TechniquesNusrat UllahNo ratings yet
- Unit 2 - Output Primitives and Their AttributesDocument20 pagesUnit 2 - Output Primitives and Their AttributesIT Department HODNo ratings yet
- Windowing: Portions of An Image or Portions of A Drawing Is Called WindowingDocument10 pagesWindowing: Portions of An Image or Portions of A Drawing Is Called WindowingAnupa ChandanNo ratings yet
- DDA & BRESENHAMS, Circle (Mid Point Approch)Document36 pagesDDA & BRESENHAMS, Circle (Mid Point Approch)varunmundaleNo ratings yet
- MidPointCircle DrawingDocument43 pagesMidPointCircle DrawingMazharulislamNo ratings yet
- Computer Notes - Scan ConversionDocument7 pagesComputer Notes - Scan Conversionecomputernotes100% (1)
- Computer Graphics Lab ExperimentsDocument59 pagesComputer Graphics Lab ExperimentsKanika KadianNo ratings yet
- Computer Graphics Lectures - 1 To 25Document313 pagesComputer Graphics Lectures - 1 To 25Tanveer Ahmed HakroNo ratings yet
- Computer Graphics Notes-WatermarkDocument55 pagesComputer Graphics Notes-WatermarkEr. Ramji TripathiNo ratings yet
- Computer Graphics: (CODE: ECS-504)Document23 pagesComputer Graphics: (CODE: ECS-504)Disha KukrejaNo ratings yet
- Computer GraphicsDocument25 pagesComputer Graphicsxixoyi3396No ratings yet
- CGM Unit 2 Question BankDocument11 pagesCGM Unit 2 Question BankAbhishek KumarNo ratings yet
- Projection of Points and PlanesDocument30 pagesProjection of Points and PlanesAnonymous p8bHAAxNo ratings yet
- Industrial RoboticsDocument47 pagesIndustrial Roboticspravdiv100% (2)
- B E MechDocument363 pagesB E MechAnonymous p8bHAAxNo ratings yet
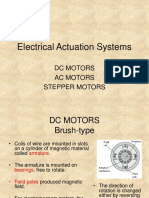
- Electrical Actuation Systems GuideDocument40 pagesElectrical Actuation Systems GuideAnonymous p8bHAAxNo ratings yet
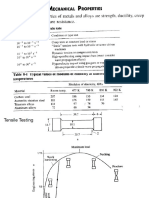
- Mn7203 Material Testing and Characterization L T P CDocument5 pagesMn7203 Material Testing and Characterization L T P CAnonymous p8bHAAxNo ratings yet
- ED7102-Computer Applications in DesignDocument11 pagesED7102-Computer Applications in DesignLOGANTKEC100% (2)
- Kings: Department of Mechanical EngineeringDocument11 pagesKings: Department of Mechanical Engineeringrammit2007No ratings yet
- Sections of Solids & Development of SurfaceDocument12 pagesSections of Solids & Development of SurfaceAnonymous p8bHAAxNo ratings yet
- Iso QBDocument2 pagesIso QBAnonymous p8bHAAxNo ratings yet
- B.E. Mech PDFDocument113 pagesB.E. Mech PDFarulmuruguNo ratings yet
- Computer Aided Design: Lecture NotesDocument61 pagesComputer Aided Design: Lecture NotesbalacoeusNo ratings yet
- Material Science Chapter on Polymer Types, Processing & ApplicationsDocument13 pagesMaterial Science Chapter on Polymer Types, Processing & ApplicationsVaibhav ShrivastavaNo ratings yet
- Line Types and Dimensioning Methods in Engineering DrawingsDocument10 pagesLine Types and Dimensioning Methods in Engineering DrawingsthamaraikkannangNo ratings yet
- New Picture PDFDocument1 pageNew Picture PDFAnonymous p8bHAAxNo ratings yet
- Unit 4 MTCDocument118 pagesUnit 4 MTCAnonymous p8bHAAxNo ratings yet
- Ferrous MetallurgyDocument30 pagesFerrous MetallurgyGaurav KumarNo ratings yet
- Capd 2Document7 pagesCapd 2Anonymous p8bHAAxNo ratings yet
- L 4Document42 pagesL 4Guna RajNo ratings yet
- Line AlgorithmDocument62 pagesLine AlgorithmAnonymous p8bHAAxNo ratings yet
- Capd Imp QuesDocument2 pagesCapd Imp QuesAnonymous p8bHAAxNo ratings yet
- Polymer ProcessingDocument28 pagesPolymer ProcessingMousom SomNo ratings yet
- Handout 6Document10 pagesHandout 6Anonymous p8bHAAxNo ratings yet
- Capd NotesDocument14 pagesCapd NotesAnonymous p8bHAAxNo ratings yet
- CG Lab Manual ProgramsDocument61 pagesCG Lab Manual ProgramsVivek KvNo ratings yet
- On Equations of Motion of Elastic Linkages by FEMDocument15 pagesOn Equations of Motion of Elastic Linkages by FEMAnonymous p8bHAAxNo ratings yet
- Forms of Inventories NotesDocument3 pagesForms of Inventories NotesAnonymous p8bHAAxNo ratings yet
- PLANT LOCATION FACTORS FOR NEW ORGANIZATIONSDocument2 pagesPLANT LOCATION FACTORS FOR NEW ORGANIZATIONSAnonymous p8bHAAxNo ratings yet
- R013968998 PDFDocument10 pagesR013968998 PDFAnonymous p8bHAAxNo ratings yet
- FEA Simulation of Metal CuttingDocument6 pagesFEA Simulation of Metal CuttingAnonymous p8bHAAxNo ratings yet
- Electro-Hydraulic Equipment Price QuotationDocument6 pagesElectro-Hydraulic Equipment Price QuotationAnonymous p8bHAAxNo ratings yet
- The Doctrine of the Bible and GodDocument10 pagesThe Doctrine of the Bible and GodEllyza Castillo AlcantaraNo ratings yet
- Baja Saeindia 2011 Final WinnersDocument1 pageBaja Saeindia 2011 Final WinnersNitin JainNo ratings yet
- The Prince and The Toy Maker (Story To Print)Document2 pagesThe Prince and The Toy Maker (Story To Print)NonNo ratings yet
- Froi of The Exiles The Lumatere Chronicles by Melina Marchetta - Discussion GuideDocument2 pagesFroi of The Exiles The Lumatere Chronicles by Melina Marchetta - Discussion GuideCandlewick PressNo ratings yet
- Test 6Document2 pagesTest 6Thư Hoàng AnhNo ratings yet
- Case Studies NL37Document1 pageCase Studies NL37laura alonsoNo ratings yet
- Ben Music Video TreatmentDocument3 pagesBen Music Video Treatment05colesbenNo ratings yet
- UNESCO World Heritage Sites in India Updated PDF Download by EntranceGeek PDFDocument3 pagesUNESCO World Heritage Sites in India Updated PDF Download by EntranceGeek PDFGowri J BabuNo ratings yet
- The Unseen Words in The Runic AlphabetDocument18 pagesThe Unseen Words in The Runic AlphabetRichter, JoannesNo ratings yet
- Graphetic Substance Or, Substance.: Maggie and Milly and Molly and May (Deviation)Document12 pagesGraphetic Substance Or, Substance.: Maggie and Milly and Molly and May (Deviation)Maricris BlgtsNo ratings yet
- A Timeline for the History of Public Art The United Kingdom and the United States of America, 1900–2005 Cameron Cartiere, Rosemary Shirley, and Shelly Willis.Pages from The Practice of Public Art Edited by Cameron CartiereDocument16 pagesA Timeline for the History of Public Art The United Kingdom and the United States of America, 1900–2005 Cameron Cartiere, Rosemary Shirley, and Shelly Willis.Pages from The Practice of Public Art Edited by Cameron CartiererobotchilangoNo ratings yet
- Woodwork JointsHow They Are Set Out, How Made and Where Used. by Fairham, WilliamDocument156 pagesWoodwork JointsHow They Are Set Out, How Made and Where Used. by Fairham, WilliamGutenberg.org100% (6)
- Katame WazaDocument3 pagesKatame WazaangangNo ratings yet
- The Uya-UyDocument1 pageThe Uya-Uymohawxz357No ratings yet
- Indus ValleyDocument37 pagesIndus ValleySwati Shukla100% (1)
- Chisholm AgentsDocument200 pagesChisholm AgentsAldo CatalanNo ratings yet
- Olympic Sports Matching QuizDocument2 pagesOlympic Sports Matching QuizMonir AmineNo ratings yet
- Blithe Spirit ResumenDocument3 pagesBlithe Spirit ResumenYael SqueoNo ratings yet
- Lord Krishna Part IIIDocument15 pagesLord Krishna Part IIIV.I.G.MenonNo ratings yet
- Engraving of Roller PrintingDocument24 pagesEngraving of Roller Printingapi-3817839100% (3)