You might also like
- 2010 MaxxForce DT-9-10 DiagnosticDocument1,329 pages2010 MaxxForce DT-9-10 Diagnosticbullfly100% (8)
- Music GcseDocument45 pagesMusic GcseAimee DohertyNo ratings yet
- Article Review Nissan Motor Company LTDDocument4 pagesArticle Review Nissan Motor Company LTDSyed IbrahimNo ratings yet
- Anti Lock Brakes Project ReportDocument74 pagesAnti Lock Brakes Project ReportErole Technologies Pvt ltd Homemade EngineerNo ratings yet
- Intelligent Braking System - SynopsisDocument6 pagesIntelligent Braking System - SynopsisTanviNo ratings yet
- Anti-Lock and Automatic Breaking SystemDocument4 pagesAnti-Lock and Automatic Breaking SystemMuhammad Rifqi PinandhitoNo ratings yet
- Project Report ON "Sanitation Tunnel"Document51 pagesProject Report ON "Sanitation Tunnel"sayalitekeNo ratings yet
- Intelligent Braking System Using MicrocontrollerDocument6 pagesIntelligent Braking System Using Microcontrollermukesh100% (1)
- REPORT FinalDocument72 pagesREPORT FinalSketch .PNo ratings yet
- Project On Reliance MoneyDocument74 pagesProject On Reliance MoneyMrudul JoshiNo ratings yet
- Automatic Floor Cleaning RobotDocument20 pagesAutomatic Floor Cleaning RobotSmolin ReniNo ratings yet
- Vtol Design PDFDocument25 pagesVtol Design PDFElner CrystianNo ratings yet
- Fundamentals of Neural Networks by Laurene FausettDocument476 pagesFundamentals of Neural Networks by Laurene Fausettsivakumar89% (18)
- Intelligent Braking SystemDocument19 pagesIntelligent Braking SystemHarsh Gaming100% (2)
- Customer Satisfaction of Life Insurance CompaniesDocument7 pagesCustomer Satisfaction of Life Insurance CompaniesGudiyaNo ratings yet
- Gourihar Polytechnic Limb, Satara: Seminar Topic: FOLDING HELMETDocument8 pagesGourihar Polytechnic Limb, Satara: Seminar Topic: FOLDING HELMETTushar RautNo ratings yet
- Soil Stabilization by Using Lime & Rice Husk Ash: A Seminar ReportDocument50 pagesSoil Stabilization by Using Lime & Rice Husk Ash: A Seminar ReportVIKAS GUPTANo ratings yet
- Final Cash Management of NTPC KorbaDocument78 pagesFinal Cash Management of NTPC KorbaMukesh Gupta100% (1)
- Final ThesisDocument41 pagesFinal Thesisbhagwat.verma12411No ratings yet
- ReportDocument39 pagesReportmanuNo ratings yet
- Automatic Reverse Braking System For AutomobileDocument48 pagesAutomatic Reverse Braking System For AutomobileSaravanan Viswakarma100% (1)
- AUTO CLUTCH CONTROL FOR VEHICLESDocument34 pagesAUTO CLUTCH CONTROL FOR VEHICLESAakash DindigulNo ratings yet
- Gas Leakage Alarm Mini ProjectDocument6 pagesGas Leakage Alarm Mini Projectarunajoseph92_868114100% (1)
- Abs Project Report PennyDocument34 pagesAbs Project Report PennyAshish BansalNo ratings yet
- Industrial Training Over Honda Motorcycle Engines: Diploma MechanicalDocument10 pagesIndustrial Training Over Honda Motorcycle Engines: Diploma MechanicalPAVAN KALYAN AMGOTHNo ratings yet
- Design of Regenerative Vehicle Suspension Recovery SystemDocument17 pagesDesign of Regenerative Vehicle Suspension Recovery SystemVinay K SNo ratings yet
- Working Capital Management at Abhinandan EngineersDocument60 pagesWorking Capital Management at Abhinandan EngineersSushil HongekarNo ratings yet
- A Report On "Material Storage Layout and Inventory Management"Document37 pagesA Report On "Material Storage Layout and Inventory Management"Pankaj AgriNo ratings yet
- Smart Phone Operated Multipurpose Agricultural Robot Report M.karthick KumarDocument62 pagesSmart Phone Operated Multipurpose Agricultural Robot Report M.karthick KumarKavipriyaNo ratings yet
- Smart Door Locking System Based On OTPFinal DocDocument51 pagesSmart Door Locking System Based On OTPFinal Docmd amaanNo ratings yet
- 1.1 Project Overview: Secure G-Cloud-Based Framework For Healthcare ServicesDocument48 pages1.1 Project Overview: Secure G-Cloud-Based Framework For Healthcare ServicesvinithNo ratings yet
- Minda Industries Interim ReportDocument10 pagesMinda Industries Interim ReportShivam WankhedeNo ratings yet
- Automatic Hand Sanitizer Project-Ii PDFDocument2 pagesAutomatic Hand Sanitizer Project-Ii PDFSuRaj Adh IkariNo ratings yet
- Project On Tyar IndustryDocument16 pagesProject On Tyar IndustryAshish PatelNo ratings yet
- Productivity Improvement I N MM540 Steering BoxDocument42 pagesProductivity Improvement I N MM540 Steering BoxVijay JNo ratings yet
- Consumer Perception Towards E-MarketingDocument16 pagesConsumer Perception Towards E-MarketingPatrickNo ratings yet
- A Project ReportDocument62 pagesA Project ReportVaishvik SatyamNo ratings yet
- Industrial Report On CommunicationDocument51 pagesIndustrial Report On CommunicationDhrubo ChakrabartyNo ratings yet
- Accident Detection and Alert SystemDocument13 pagesAccident Detection and Alert Systemtayyaba riazNo ratings yet
- Finaal MarutiDocument56 pagesFinaal MarutiMahesh KumarNo ratings yet
- Seminar FinalDocument23 pagesSeminar FinalJithin Jose0% (1)
- Project Report of RICHADocument31 pagesProject Report of RICHASUMIT KUMAR PANDEY PNo ratings yet
- Automatic Wipe and Smart Control Wiper Using Sensor and Controller System Nor ' Asyikin BT Abd Hamid TK7881.2.N37 2009 - 24 PagesDocument24 pagesAutomatic Wipe and Smart Control Wiper Using Sensor and Controller System Nor ' Asyikin BT Abd Hamid TK7881.2.N37 2009 - 24 PagesHafiezul HassanNo ratings yet
- Aaaarti PDFDocument71 pagesAaaarti PDFAbhay MishraNo ratings yet
- Iip Tvs PVT LTD ReportDocument21 pagesIip Tvs PVT LTD Reportaswin raja100% (1)
- Review of Production/operations ManagementDocument22 pagesReview of Production/operations Managementskyppy2No ratings yet
- A Seminar Report PRASADDocument45 pagesA Seminar Report PRASADLokesh LokeNo ratings yet
- Customers Perception Towards HDFC Standard LifeDocument76 pagesCustomers Perception Towards HDFC Standard Lifeabhishekpadhi100% (5)
- CFL Changer Project ReportDocument25 pagesCFL Changer Project ReportTanviNo ratings yet
- Report of Construction Worker-FinalDocument62 pagesReport of Construction Worker-FinalRajendra JoshiNo ratings yet
- Electric Car Jack Mini Project ReportDocument35 pagesElectric Car Jack Mini Project ReportSneha ChaudharyNo ratings yet
- JBMDocument53 pagesJBMVaibhav Ahlawat100% (1)
- Mosquito Repellent Circuit Mini Project ReportDocument26 pagesMosquito Repellent Circuit Mini Project ReportDinesh Panicker100% (1)
- RATIO ANALYSIS INTRODocument53 pagesRATIO ANALYSIS INTROGuru Murthy D R0% (1)
- Employee's Job Satisfaction at Zuari Cements LTD., YerraguntlaDocument69 pagesEmployee's Job Satisfaction at Zuari Cements LTD., Yerraguntlathella deva prasadNo ratings yet
- Summer Industrialtraining Report On Honda CarDocument36 pagesSummer Industrialtraining Report On Honda CarBanwari Lal Prajapat100% (1)
- AyurvedaDocument8 pagesAyurvedaAnish JohnNo ratings yet
- Box Transport MechanismDocument41 pagesBox Transport MechanismsaijanNo ratings yet
- Main Project (Batch - 9)Document57 pagesMain Project (Batch - 9)RamNo ratings yet
- AfMcoft PDFDocument177 pagesAfMcoft PDFAmit KumarNo ratings yet
- Fabrication and Analysis of Intelligent Braking SystemDocument19 pagesFabrication and Analysis of Intelligent Braking SystemVishal LabdeNo ratings yet
- Fabrication of Conceptual Model of Intelligent Braking SystemDocument35 pagesFabrication of Conceptual Model of Intelligent Braking SystemJeevanNo ratings yet
- IBS IntroDocument6 pagesIBS IntroibrahimNo ratings yet
- Intelligent Braking System Using MicrocontrollerDocument6 pagesIntelligent Braking System Using MicrocontrollerJyotsanaTrivedi100% (1)
- Solar Tracker With Stepper Motor Control Using MicrocontrollerDocument2 pagesSolar Tracker With Stepper Motor Control Using Microcontrollerieee4mybusinessonly100% (1)
- Dual Axis Solar Tracker Using ArduinoDocument16 pagesDual Axis Solar Tracker Using Arduinokanchan boneNo ratings yet
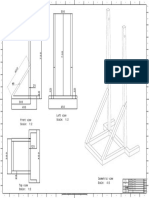
- FrameDocument1 pageFramesuraj dhulannavarNo ratings yet
- Model of Anti Roll Back System On Hilling Situation in Car-29317Document4 pagesModel of Anti Roll Back System On Hilling Situation in Car-29317kanchan boneNo ratings yet
- 1:1 XXX A4: Toshavi 4/8/2016Document1 page1:1 XXX A4: Toshavi 4/8/2016suraj dhulannavarNo ratings yet
- 1210 5973Document17 pages1210 5973giridharsinghNo ratings yet
- Patil 2016Document5 pagesPatil 2016kanchan boneNo ratings yet
- Ratchets 0101Document1 pageRatchets 0101kanchan boneNo ratings yet
- CALCULATION OF FOUR WAY POWER HACK SAW DESIGNDocument4 pagesCALCULATION OF FOUR WAY POWER HACK SAW DESIGNkanchan bone80% (5)
- Hill Station Breaking SystemDocument48 pagesHill Station Breaking Systemkanchan bone80% (5)
- YyyyyyyyyyyyyyyyyyyyyyyyyDocument6 pagesYyyyyyyyyyyyyyyyyyyyyyyyykanchan boneNo ratings yet
- 1210 5973Document17 pages1210 5973giridharsinghNo ratings yet
- Design of An Adaptive Headlights System For AutomobilesDocument6 pagesDesign of An Adaptive Headlights System For Automobileskanchan boneNo ratings yet
- 978 1 58503 581 6 6Document21 pages978 1 58503 581 6 6Saravanan Srvn TNo ratings yet
- Head Light 1 PDFDocument5 pagesHead Light 1 PDFkanchan boneNo ratings yet
- Head Li8 + Hand Brake With CalculationsDocument32 pagesHead Li8 + Hand Brake With Calculationskanchan boneNo ratings yet
- Fabrication of Electro Hydraulic Jack: International Research Journal of Engineering and Technology (IRJET)Document5 pagesFabrication of Electro Hydraulic Jack: International Research Journal of Engineering and Technology (IRJET)kanchan boneNo ratings yet
- Detailed Project Report ON: Hybrid Solar Tray Dryer - 96 TraysDocument47 pagesDetailed Project Report ON: Hybrid Solar Tray Dryer - 96 Trayskanchan boneNo ratings yet
- Material Selection Method in Design of Automotive Brake DiscDocument5 pagesMaterial Selection Method in Design of Automotive Brake Discgustavitolp87No ratings yet
- Ecsecuritybased-Safety Auto Brake System For Hill Station Vehicle Using Mems Sensor.Document3 pagesEcsecuritybased-Safety Auto Brake System For Hill Station Vehicle Using Mems Sensor.kanchan bone100% (1)
- Timers, Serial CommunicationDocument19 pagesTimers, Serial CommunicationVyshnav PNo ratings yet
- Advu en PDFDocument65 pagesAdvu en PDFGustavo Rodrigues de SouzaNo ratings yet
- Bash 101 Hacks PDFDocument5 pagesBash 101 Hacks PDFAmira A MarreiNo ratings yet
- Bill of Material: The Hanover CompanyDocument17 pagesBill of Material: The Hanover CompanyLIVIANo ratings yet
- User Mode I. System Support Processes: de Leon - Dolliente - Gayeta - Rondilla It201 - Platform Technology - TPDocument6 pagesUser Mode I. System Support Processes: de Leon - Dolliente - Gayeta - Rondilla It201 - Platform Technology - TPCariza DollienteNo ratings yet
- Example 1 LS Dyna - Bullet Model SimulationDocument6 pagesExample 1 LS Dyna - Bullet Model Simulationsunil_vrvNo ratings yet
- MSYS-1 0 11-ChangesDocument3 pagesMSYS-1 0 11-ChangesCyril BerthelotNo ratings yet
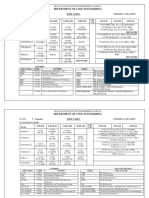
- Time TableDocument7 pagesTime TableChethan .H.GNo ratings yet
- Design of Shaft Straightening MachineDocument58 pagesDesign of Shaft Straightening MachineChiragPhadkeNo ratings yet
- Determination of Voltage DropDocument6 pagesDetermination of Voltage DropFahmi CumiNo ratings yet
- Regeln Map 2Document2 pagesRegeln Map 2bruno.wetzelNo ratings yet
- QT140 500 KG Per Hr. Fish Feed Pelleting PlantDocument11 pagesQT140 500 KG Per Hr. Fish Feed Pelleting PlantShekhar MitraNo ratings yet
- Instrumentation Design UTHMDocument5 pagesInstrumentation Design UTHMAnis AzwaNo ratings yet
- IMChap 014 SDocument14 pagesIMChap 014 STroy WingerNo ratings yet
- 3BSE079234 - en 800xa 6.0 ReleasedDocument7 pages3BSE079234 - en 800xa 6.0 ReleasedFormat_CNo ratings yet
- Data AnalysisDocument7 pagesData AnalysisAndrea MejiaNo ratings yet
- RelativedensityipgDocument2 pagesRelativedensityipgapi-310625232No ratings yet
- Reliability EngineeringDocument9 pagesReliability Engineeringnvaradharajan1971No ratings yet
- Sec 2 French ImmersionDocument1 pageSec 2 French Immersionapi-506328259No ratings yet
- ISO 8243 2013 Cigarettes - SamplingDocument18 pagesISO 8243 2013 Cigarettes - SamplingEko YuliantoNo ratings yet
- College of Information Technology Dmmmsu-Mluc City of San FernandoDocument9 pagesCollege of Information Technology Dmmmsu-Mluc City of San FernandoZoilo BagtangNo ratings yet
- Lecture 1: Encoding Language: LING 1330/2330: Introduction To Computational Linguistics Na-Rae HanDocument18 pagesLecture 1: Encoding Language: LING 1330/2330: Introduction To Computational Linguistics Na-Rae HanLaura AmwayiNo ratings yet
- Five Factors of CleaningDocument2 pagesFive Factors of CleaningKimberly Bruce De CastroNo ratings yet
- Climate Change: The Fork at The End of NowDocument28 pagesClimate Change: The Fork at The End of NowMomentum Press100% (1)
- Enzyme Inhibition and ToxicityDocument12 pagesEnzyme Inhibition and ToxicityDaniel OmolewaNo ratings yet
- CI SetDocument18 pagesCI Setতন্ময় ঢালি Tanmay DhaliNo ratings yet