You might also like
- Radar Observer's Handbook 9ed 1998 0851746667-UnlockedDocument233 pagesRadar Observer's Handbook 9ed 1998 0851746667-UnlockedМилен Долапчиев100% (1)
- SAR Image Formation Toolbox For MATLABDocument13 pagesSAR Image Formation Toolbox For MATLABLissete VergaraNo ratings yet
- F-15 (Final)Document244 pagesF-15 (Final)bdunc100% (3)
- Arthur C. Fleischer Et Al. - Fleischer's Sonography in Obstetrics & Gynecology (2017, McGraw-Hill)Document1,425 pagesArthur C. Fleischer Et Al. - Fleischer's Sonography in Obstetrics & Gynecology (2017, McGraw-Hill)Cherecheș Roberta-Elisa100% (2)
- Radar Systems NotesDocument457 pagesRadar Systems NotesMridula Mittal Bansal100% (2)
- EPOCH 1000 Series Training Presentation 12-08Document74 pagesEPOCH 1000 Series Training Presentation 12-08ابو ياسينNo ratings yet
- Radar EssentialsDocument144 pagesRadar EssentialsRandy Keith89% (9)
- EEE381B Aerospace Systems & Avionics: RadarDocument49 pagesEEE381B Aerospace Systems & Avionics: RadardegabbzsNo ratings yet
- JMA-3300 Instruction ManualDocument294 pagesJMA-3300 Instruction ManualAfrizal SetiawanNo ratings yet
- A Performance Study of MIMO Detectors: Christoph Windpassinger, Lutz Lampe, Robert F. H. Fischer, Thorsten HehnDocument16 pagesA Performance Study of MIMO Detectors: Christoph Windpassinger, Lutz Lampe, Robert F. H. Fischer, Thorsten HehnLe-Nam TranNo ratings yet
- Sonosite Echo Machine Model MicromaxxDocument100 pagesSonosite Echo Machine Model MicromaxxAakshiRajputNo ratings yet
- Sar Image FormationDocument15 pagesSar Image FormationMusyarofah HanafiNo ratings yet
- Ut Q Bank 12 Bhide 100 QBDocument25 pagesUt Q Bank 12 Bhide 100 QBkingstonNo ratings yet
- Design of Linear Array Transducer Using Ultrasound Simulation Program Field-IIDocument7 pagesDesign of Linear Array Transducer Using Ultrasound Simulation Program Field-IIinventyNo ratings yet
- Usm 36 Operation ManualsDocument306 pagesUsm 36 Operation ManualslenaronNo ratings yet
- Eccm in RadarsDocument89 pagesEccm in Radarsjumaah5234100% (4)
- Radar Clutter Rejection Doppler FilteringDocument67 pagesRadar Clutter Rejection Doppler FilteringneilwuNo ratings yet
- Lecture #15: Ambiguity Resolution, Blind Zones, & Pulse Pair ProcessingDocument55 pagesLecture #15: Ambiguity Resolution, Blind Zones, & Pulse Pair ProcessingMuhammad RizwanNo ratings yet
- Digital Spectral Analysis MATLAB® Software User GuideFrom EverandDigital Spectral Analysis MATLAB® Software User GuideNo ratings yet
- Fact Sheet - Bill BoardDocument2 pagesFact Sheet - Bill BoardNick NumlkNo ratings yet
- BS 4331-2 - 1972Document14 pagesBS 4331-2 - 1972momoNo ratings yet
- Computer Processing of Remotely-Sensed Images: An IntroductionFrom EverandComputer Processing of Remotely-Sensed Images: An IntroductionNo ratings yet
- List Mode Guide PDFDocument20 pagesList Mode Guide PDFsandeep yadavNo ratings yet
- DeGreve AES 2007Document16 pagesDeGreve AES 2007Asnarf EbraNo ratings yet
- Engineering Journal Multipath Parameter Estimation For Synthetic Aperture Sonar Using The SAGE AlgorithmDocument11 pagesEngineering Journal Multipath Parameter Estimation For Synthetic Aperture Sonar Using The SAGE AlgorithmEngineering JournalNo ratings yet
- Non Unuiform Phased Array Beamforming With Covariance Based MethodDocument6 pagesNon Unuiform Phased Array Beamforming With Covariance Based MethodIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- 2-A Comparative Study of Time-Delay Estimation Techniques UsingDocument57 pages2-A Comparative Study of Time-Delay Estimation Techniques Usingtcth_amyNo ratings yet
- Expo CompandDocument4 pagesExpo CompandAshutosh RajopadhyeNo ratings yet
- P I P R L D S e F: Apr TeDocument11 pagesP I P R L D S e F: Apr Teዜና ማርቆስNo ratings yet
- Improved Separation of Electrocardiography Signals and Mixed MR Images by Using Finite Ridgelet TransformDocument8 pagesImproved Separation of Electrocardiography Signals and Mixed MR Images by Using Finite Ridgelet TransformInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Overview of RF Power Amplifier Digital Predistortion Techniques For Wireless Communication SystemsDocument6 pagesAn Overview of RF Power Amplifier Digital Predistortion Techniques For Wireless Communication SystemsEnos Marcos BastosNo ratings yet
- Efficient Stripmap SAR Raw Data Generation Taking Into Account Sensor Trajectory DeviationsDocument5 pagesEfficient Stripmap SAR Raw Data Generation Taking Into Account Sensor Trajectory Deviationsmani567No ratings yet
- Progress in Electromagnetics Research, Vol. 122, 361-387, 2012Document27 pagesProgress in Electromagnetics Research, Vol. 122, 361-387, 2012hos3adel85No ratings yet
- Modified Pts With Fecs For Papr Reduction in Mimo-Ofdm System With Different SubcarriersDocument6 pagesModified Pts With Fecs For Papr Reduction in Mimo-Ofdm System With Different SubcarriersAnonymous bcDacMNo ratings yet
- UBICC Eltholth WHT 82Document5 pagesUBICC Eltholth WHT 82Ubiquitous Computing and Communication JournalNo ratings yet
- A Review Study On Mathematical Methods For Fault Detection Problems in Induction MotorsDocument10 pagesA Review Study On Mathematical Methods For Fault Detection Problems in Induction MotorsDante GuajardoNo ratings yet
- Spij 170Document9 pagesSpij 170Vaibhav NarulaNo ratings yet
- PAPR Reduction in OFDM Systems Using PTS: With New Phase SequencesDocument7 pagesPAPR Reduction in OFDM Systems Using PTS: With New Phase SequencesAJER JOURNALNo ratings yet
- An Formation Algorithm of The Synthetic Aperture in An Automotive Radar With Use of The MUSIC AlgorithmDocument5 pagesAn Formation Algorithm of The Synthetic Aperture in An Automotive Radar With Use of The MUSIC Algorithmletiendung_dtvt7119No ratings yet
- Near-Ml Detection in Massive Mimo Systems With One-Bit Adcs: Algorithm and Vlsi DesignDocument5 pagesNear-Ml Detection in Massive Mimo Systems With One-Bit Adcs: Algorithm and Vlsi DesignNguyễn Minh TrìnhNo ratings yet
- Analysis of Performance and Implementation Complexity of Array Processing in Anti-Jamming GNSS ReceiversDocument6 pagesAnalysis of Performance and Implementation Complexity of Array Processing in Anti-Jamming GNSS ReceiversImpala RemziNo ratings yet
- IEEEGlobecom2008 MGomesDocument5 pagesIEEEGlobecom2008 MGomesldpcNo ratings yet
- Joint Clip and Quantization Effects Characterization in OFDM ReceiversDocument8 pagesJoint Clip and Quantization Effects Characterization in OFDM ReceiversBruno BarcellosNo ratings yet
- Garcia 2018Document6 pagesGarcia 2018David BenoitNo ratings yet
- Real-Time Radar SLAM: 11. Workshop Fahrerassistenzsysteme Und Automatisiertes FahrenDocument10 pagesReal-Time Radar SLAM: 11. Workshop Fahrerassistenzsysteme Und Automatisiertes FahrenAsmaa HassanNo ratings yet
- clecocq,+JCAA Vol.11 No.3 1983 pp.047Document6 pagesclecocq,+JCAA Vol.11 No.3 1983 pp.047zerjuniorNo ratings yet
- LMS Algorithm For Optimizing The Phased Array Antenna Radiation PatternDocument5 pagesLMS Algorithm For Optimizing The Phased Array Antenna Radiation PatternJournal of TelecommunicationsNo ratings yet
- CKT Sys SG ProcessDocument26 pagesCKT Sys SG ProcessnamikishanNo ratings yet
- Complex-Weighted OFDM Transmission With Low Papr: Homayoun Nikookar and Djoko SoehartonoDocument4 pagesComplex-Weighted OFDM Transmission With Low Papr: Homayoun Nikookar and Djoko Soehartonojagadeesh jagadeNo ratings yet
- Multiple Input Multiple Output Orthogonal Frequency Division Multiplexing (MIMO-OFDM)Document13 pagesMultiple Input Multiple Output Orthogonal Frequency Division Multiplexing (MIMO-OFDM)Anonymous bcDacMNo ratings yet
- Performance and Analysis of OFDM Signal Using Matlab SimulinkDocument7 pagesPerformance and Analysis of OFDM Signal Using Matlab SimulinkIJMERNo ratings yet
- Common Phase DUE To Phase Noise in Ofdm Estimation and SuppressionDocument5 pagesCommon Phase DUE To Phase Noise in Ofdm Estimation and SuppressionBrudedo FuystolNo ratings yet
- Modified Pts With Fecs For Papr Reduction in Mimo-Ofdm System With Different SubcarriersDocument11 pagesModified Pts With Fecs For Papr Reduction in Mimo-Ofdm System With Different SubcarriersAnonymous bcDacMNo ratings yet
- Robust Endpoint Detection For Speech Recognition Based On Discriminative Feature ExtractionDocument4 pagesRobust Endpoint Detection For Speech Recognition Based On Discriminative Feature ExtractionMicro TuấnNo ratings yet
- Array Interpolation and Bias Reduction PDFDocument10 pagesArray Interpolation and Bias Reduction PDFMarisol HernandezNo ratings yet
- Low-PAPR OFDM Waveform Design For Radar and Communication SystemsDocument6 pagesLow-PAPR OFDM Waveform Design For Radar and Communication Systemssharmaald901No ratings yet
- Real Time Implementation of Adaptive Beam Former For Phased Array Radar Over DSP KitDocument10 pagesReal Time Implementation of Adaptive Beam Former For Phased Array Radar Over DSP KitAI Coordinator - CSC JournalsNo ratings yet
- Publications SmartAntennasDocument8 pagesPublications SmartAntennasCatherine PetersNo ratings yet
- Bearing Defect IdentificationDocument7 pagesBearing Defect Identificationmhsgh2003No ratings yet
- 0 5I18-IJAET0118718 - v6 - Iss6 - 2363-2372 PDFDocument10 pages0 5I18-IJAET0118718 - v6 - Iss6 - 2363-2372 PDFwin alfalahNo ratings yet
- Is The Horizontal Component of The Velocity Perpendicular To The AntennaDocument2 pagesIs The Horizontal Component of The Velocity Perpendicular To The Antennaanjali9myneniNo ratings yet
- Daubchies Filter PDFDocument10 pagesDaubchies Filter PDFThrisul KumarNo ratings yet
- Design of Stable IIR Digital Filters With Specified Group Delay ErrorsDocument6 pagesDesign of Stable IIR Digital Filters With Specified Group Delay ErrorsPushpendra DwivediNo ratings yet
- Multi-Dimensional Model Order SelectionDocument13 pagesMulti-Dimensional Model Order SelectionRodrigo RozárioNo ratings yet
- 3-Low-Complexity Joint Range and Doppler FMCW Radar Algorithm Based On Number of TargetsDocument14 pages3-Low-Complexity Joint Range and Doppler FMCW Radar Algorithm Based On Number of TargetsPAULO CÉSAR RIBEIRO MARCIANONo ratings yet
- Improving Middle Square Method RNG Using. 2011Document5 pagesImproving Middle Square Method RNG Using. 2011MustikaSariNo ratings yet
- Doa EstimationDocument8 pagesDoa Estimationanon_49540064No ratings yet
- Peak To Average Power Ratio in Digital CommunicationsDocument4 pagesPeak To Average Power Ratio in Digital CommunicationsAngel TrianoNo ratings yet
- Multiple Attenuation Via Predictive Deconvolution in The Radial DomainDocument20 pagesMultiple Attenuation Via Predictive Deconvolution in The Radial DomainDwi RomadianaNo ratings yet
- IOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringDocument7 pagesIOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- University 2 Marks Ans DTSSPDocument5 pagesUniversity 2 Marks Ans DTSSPsanth_213No ratings yet
- Effect of Carrier Frequency Offset On SER of OFDM SystemDocument5 pagesEffect of Carrier Frequency Offset On SER of OFDM SystemJournal of TelecommunicationsNo ratings yet
- R P A P R Mimo-Ofdm S: Educing The Eak To Verage Ower Atio OF YstemsDocument19 pagesR P A P R Mimo-Ofdm S: Educing The Eak To Verage Ower Atio OF YstemsAIRCC - IJCNCNo ratings yet
- Noise Reduction Method For Terrain Phase Estmation - Version 1.0Document6 pagesNoise Reduction Method For Terrain Phase Estmation - Version 1.0Sp LeeNo ratings yet
- An Overview of Space-Time Adaptive Processing For RadarDocument7 pagesAn Overview of Space-Time Adaptive Processing For RadarShiva KumarNo ratings yet
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- A Hybrid Transformation Technique For Advanced Video Coding: M. Ezhilarasan, P. ThambiduraiDocument7 pagesA Hybrid Transformation Technique For Advanced Video Coding: M. Ezhilarasan, P. ThambiduraiUbiquitous Computing and Communication JournalNo ratings yet
- UBICC-submitted 206 206Document11 pagesUBICC-submitted 206 206Ubiquitous Computing and Communication JournalNo ratings yet
- Ubiccjournalvolume2no3 4 43Document12 pagesUbiccjournalvolume2no3 4 43Ubiquitous Computing and Communication JournalNo ratings yet
- Ubicc-Cfn 113Document13 pagesUbicc-Cfn 113Ubiquitous Computing and Communication JournalNo ratings yet
- Ubiccjournalvolume2no3 2 28Document10 pagesUbiccjournalvolume2no3 2 28Ubiquitous Computing and Communication JournalNo ratings yet
- Hand-Size Variations Effect On Mobile Phone Texting SatisfactionDocument8 pagesHand-Size Variations Effect On Mobile Phone Texting SatisfactionUbiquitous Computing and Communication JournalNo ratings yet
- Ubiccjournalvolume2no3 1 25Document5 pagesUbiccjournalvolume2no3 1 25Ubiquitous Computing and Communication JournalNo ratings yet
- Ubiccform 240Document6 pagesUbiccform 240Ubiquitous Computing and Communication JournalNo ratings yet
- Ubiccjournalvolume2no3 6 70Document16 pagesUbiccjournalvolume2no3 6 70Ubiquitous Computing and Communication JournalNo ratings yet
- A Novel Opportunistic Spectrum Access For Applications in Cognitive RadioDocument5 pagesA Novel Opportunistic Spectrum Access For Applications in Cognitive RadioUbiquitous Computing and Communication JournalNo ratings yet
- Ubicc 68Document11 pagesUbicc 68Ubiquitous Computing and Communication JournalNo ratings yet
- Ubiccjournalvolume2no3 5 67Document9 pagesUbiccjournalvolume2no3 5 67Ubiquitous Computing and Communication JournalNo ratings yet
- Ubicc 624 624Document7 pagesUbicc 624 624Ubiquitous Computing and Communication JournalNo ratings yet
- Ubiccjournalvolume2no3 8 31Document8 pagesUbiccjournalvolume2no3 8 31Ubiquitous Computing and Communication JournalNo ratings yet
- Ubicc 200 200Document7 pagesUbicc 200 200Ubiquitous Computing and Communication JournalNo ratings yet
- JMA-9100 Instruction ManualDocument572 pagesJMA-9100 Instruction ManualLa DewaNo ratings yet
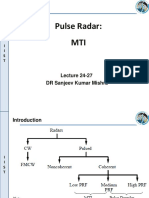
- Lecture 24-27-Pulse Radar-MTIDocument43 pagesLecture 24-27-Pulse Radar-MTIMiguel Andres AlonsoNo ratings yet
- Pundit PL 200 ManualDocument26 pagesPundit PL 200 ManualAlfredo Cerdeña Jr.No ratings yet
- Navigatie Brevet PDFDocument65 pagesNavigatie Brevet PDFNPTNo ratings yet
- Usm Go Plus Brochure English PDFDocument4 pagesUsm Go Plus Brochure English PDFKishorsing RajputNo ratings yet
- Radar Speed GunDocument27 pagesRadar Speed GunTareq Ziad60% (5)
- Radar 1Document67 pagesRadar 1mancangkulNo ratings yet
- SAR Signal ProcessingDocument84 pagesSAR Signal ProcessingDoha AbbasNo ratings yet
- Radar Manual2019Document24 pagesRadar Manual2019UNCLE STATIONARYNo ratings yet
- Digital Beamforming Architecture and Techniques FoDocument6 pagesDigital Beamforming Architecture and Techniques FoBharathidasan SugumaranNo ratings yet
- Radar Systems - Quick Guide: Basic Principle of RadarDocument5 pagesRadar Systems - Quick Guide: Basic Principle of Radargaurav tiwariNo ratings yet
- Geoscience and Remote Sensing, New Achievements PDFDocument516 pagesGeoscience and Remote Sensing, New Achievements PDFMagno JuniorNo ratings yet
- VanZyl CA Skripsie2020Document56 pagesVanZyl CA Skripsie2020lovejoy mhishiNo ratings yet