You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- EM000039Rev1 PDFDocument1 pageEM000039Rev1 PDFGustavo RiveraNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Data Flow Diagrams PDFDocument9 pagesData Flow Diagrams PDFYasmine2410No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Project of InternshipDocument2 pagesProject of InternshipSurendra PatelNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Vertical Take Off and LandingDocument126 pagesVertical Take Off and LandingMukesh JindalNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- ICON Catalog LocationsDocument16 pagesICON Catalog LocationsTools StuffsNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- 1.5SMC Series-1864824 PDFDocument8 pages1.5SMC Series-1864824 PDFRizwan RanaNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Velocloud OverviewDocument29 pagesVelocloud OverviewFebri RawlinsNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- REE Copy PDFDocument9 pagesREE Copy PDFJake ZozobradoNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Cable Ties DatasheetDocument7 pagesCable Ties DatasheetGovind ChaudhariNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- RT 67Document11 pagesRT 67dinesh kumarNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
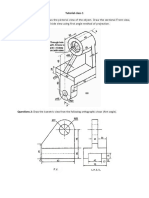
- Tutorial Class 1 Questions 1Document2 pagesTutorial Class 1 Questions 1Bố Quỳnh ChiNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Simple and Compound Gear TrainDocument2 pagesSimple and Compound Gear TrainHendri Yoga SaputraNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Isuzu 4hk1x Sheet HRDocument4 pagesIsuzu 4hk1x Sheet HRMuhammad Haqi Priyono100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Computer Laboratory Maintenance Plan and ScheduleDocument5 pagesComputer Laboratory Maintenance Plan and ScheduleJm Valiente100% (3)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Exterity g44 Serie 1.2 ManualDocument87 pagesExterity g44 Serie 1.2 Manualruslan20851No ratings yet
- Iso 9974-2Document4 pagesIso 9974-2willianNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Surveying Civil Engineering Pictorial Booklet 15 English MediumDocument125 pagesSurveying Civil Engineering Pictorial Booklet 15 English MediumtnstcnpalanisamyNo ratings yet
- Heat ExchangersDocument25 pagesHeat ExchangersMohammed Kabiruddin100% (7)
- METCALDocument28 pagesMETCALa1006aNo ratings yet
- CP 001 - 18 - PP - Eng - 00 - CP Umk450t (2018) 18VR5K01 (Eng)Document52 pagesCP 001 - 18 - PP - Eng - 00 - CP Umk450t (2018) 18VR5K01 (Eng)Honda almagrorepuestosNo ratings yet
- Uses of The Components of Crude Oil As FuelsDocument6 pagesUses of The Components of Crude Oil As FuelsPearl LawrenceNo ratings yet
- Planning and Site Investigation in TunnellingDocument6 pagesPlanning and Site Investigation in TunnellingJean DalyNo ratings yet
- CE 411 Lecture 03 - Moment AreaDocument27 pagesCE 411 Lecture 03 - Moment AreaNophiNo ratings yet
- Udemy Course DescriptionDocument1 pageUdemy Course DescriptionZain AbidNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Brochure FDP - EG 16.08.2021-1-2-2Document3 pagesBrochure FDP - EG 16.08.2021-1-2-2sri sivaNo ratings yet
- MC9S12XD128 ProcessadorDocument1,350 pagesMC9S12XD128 ProcessadorMarcelo OemNo ratings yet
- Tailless AircraftDocument17 pagesTailless AircraftVikasVickyNo ratings yet
- Crisfield - Vol1 - NonLinear Finite Element Analysis of Solids and Structures EssentialsDocument360 pagesCrisfield - Vol1 - NonLinear Finite Element Analysis of Solids and Structures EssentialsAnonymous eCD5ZRNo ratings yet
- 2g SSV Drive Test Report 154128 - Yos - SudrsoDocument8 pages2g SSV Drive Test Report 154128 - Yos - SudrsohimmuraaNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- CST 336 Final Project Computown DocumentationDocument12 pagesCST 336 Final Project Computown Documentationapi-461214598No ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)