You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Coeficientes de InfluenciaDocument100 pagesCoeficientes de InfluenciaRicardo ColosimoNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- 6253 Engg MechanicsDocument177 pages6253 Engg MechanicsRicardo ColosimoNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Lumped vs. Distributed Systems PDFDocument2 pagesLumped vs. Distributed Systems PDFRicardo ColosimoNo ratings yet
- TM Chap15 Strain PDFDocument22 pagesTM Chap15 Strain PDFRicardo ColosimoNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- BME 332 Strain DeformationDocument15 pagesBME 332 Strain DeformationRicardo ColosimoNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Strain Chap 04Document37 pagesStrain Chap 04Ricardo ColosimoNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Deformation Gradient PDFDocument10 pagesDeformation Gradient PDFRicardo ColosimoNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Deformation PDFDocument66 pagesDeformation PDFRicardo ColosimoNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Continuum Mechanics - Strains and Deformations - WikiversityDocument8 pagesContinuum Mechanics - Strains and Deformations - WikiversityRicardo ColosimoNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- 2strain and Deformation - Mark PDFDocument44 pages2strain and Deformation - Mark PDFRicardo ColosimoNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- 2strain and Deformation - MarkDocument44 pages2strain and Deformation - MarkRicardo ColosimoNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Ch4 PDFDocument31 pagesCh4 PDFRicardo ColosimoNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- 990325master PDFDocument258 pages990325master PDFRicardo ColosimoNo ratings yet
- 3 - Gravimetric Analysis of Calcium and Hard Water - SDocument6 pages3 - Gravimetric Analysis of Calcium and Hard Water - SJon CranNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Ryton QC160N and QC160P: Polyphenylene Sulfide AlloysDocument2 pagesRyton QC160N and QC160P: Polyphenylene Sulfide AlloysJustin HendrixNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Fasco Draft Inducer Cross Reference GuideDocument16 pagesFasco Draft Inducer Cross Reference GuideRobNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Anton Paar - Inline PumpDocument45 pagesAnton Paar - Inline Pumpikuzma_1No ratings yet
- Industrial Meter CatalogDocument84 pagesIndustrial Meter CataloghotnatkapoorNo ratings yet
- Fishfarming LowresDocument56 pagesFishfarming LowresNomNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- MSDS Accepta LTD Accepta 3543Document5 pagesMSDS Accepta LTD Accepta 3543mechzarNo ratings yet
- 361-Article Text-1300-1-10-20230402Document7 pages361-Article Text-1300-1-10-20230402rayhan syahdeiniNo ratings yet
- Upply INE Anitization: Operation & Maintenance Manual Demineralization Water Treatment SystemDocument11 pagesUpply INE Anitization: Operation & Maintenance Manual Demineralization Water Treatment SystemHedi Ben MohamedNo ratings yet
- Catalogo Etaprime BNDocument18 pagesCatalogo Etaprime BNRicardo BarrosNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Blasting Design For TunnelsDocument51 pagesBlasting Design For TunnelsEdisonNo ratings yet
- Amtek Auto LTD: Company OverviewDocument3 pagesAmtek Auto LTD: Company OverviewThomas LeeNo ratings yet
- LPG Tanker WoolcottDocument80 pagesLPG Tanker WoolcottnickurfriendNo ratings yet
- Ethylbenzene ProductionDocument30 pagesEthylbenzene ProductionNurul Ain Ibrahim75% (4)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- BS en 01514-3-1997Document12 pagesBS en 01514-3-1997Samwel TarimoNo ratings yet
- Gravimetric Tuto Ans PDFDocument2 pagesGravimetric Tuto Ans PDFNisha Lauren VishvanathNo ratings yet
- Kamel 2004Document5 pagesKamel 2004Tetra Ethayle RahatNo ratings yet
- San Ace 60A25 E PDFDocument3 pagesSan Ace 60A25 E PDFThi NguyễnNo ratings yet
- Is 14268 - 2022-1Document16 pagesIs 14268 - 2022-1Ramudu Kodur100% (18)
- ITQ0100 To ITQ9000 Brochure PDFDocument14 pagesITQ0100 To ITQ9000 Brochure PDFhardik033No ratings yet
- SAN EPD (Rev 03)Document47 pagesSAN EPD (Rev 03)Venu Gopal100% (1)
- Mini ProjectDocument79 pagesMini ProjectadzhamNo ratings yet
- York Brochure Cadet PDFDocument2 pagesYork Brochure Cadet PDFDirectorio FotograficoNo ratings yet
- ASTM D 5861-Ensayo de Adhesión FRP A Sustrato MetálicoDocument2 pagesASTM D 5861-Ensayo de Adhesión FRP A Sustrato MetálicoFernando Alfredo Sepúlveda JiménezNo ratings yet
- A 723 - A 723M - 94 R99 - Qtcymy05nfi5oq - PDFDocument4 pagesA 723 - A 723M - 94 R99 - Qtcymy05nfi5oq - PDFZam DresNo ratings yet
- Flexpipe Systems Brochure AustraliaDocument6 pagesFlexpipe Systems Brochure AustraliapenjualgasNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
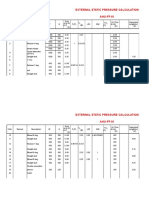
- External Static Pressure Calculation AHU-FF-01Document38 pagesExternal Static Pressure Calculation AHU-FF-01AslamNo ratings yet
- Glastic Standoffs InsulatorsDocument2 pagesGlastic Standoffs Insulatorsdanielliram993No ratings yet
- Sch3u Synthesis & DecompositionDocument32 pagesSch3u Synthesis & Decompositionben0706No ratings yet
- Guidelines For Sewage Works Design WSA-MOEDocument28 pagesGuidelines For Sewage Works Design WSA-MOEMichał KisielewskiNo ratings yet