You might also like
- Sistemas Eléctricos de Potencia - Corto Circuito MonofasicoDocument29 pagesSistemas Eléctricos de Potencia - Corto Circuito MonofasicoFrank GalvanNo ratings yet
- Capítulos de El Chavo AnimadoDocument5 pagesCapítulos de El Chavo Animadouncpfiee100% (1)
- Preguntas y Respuestas DINÁMICADocument9 pagesPreguntas y Respuestas DINÁMICAEliana GNo ratings yet
- Datos Tecnicos IchuñaDocument7 pagesDatos Tecnicos IchuñauncpfieeNo ratings yet
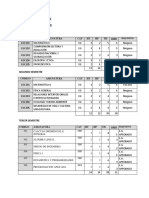
- Nuevo Plan de Estudios-Fiee PDFDocument5 pagesNuevo Plan de Estudios-Fiee PDFuncpfieeNo ratings yet
- Fuente SimetricaDocument6 pagesFuente SimetricauncpfieeNo ratings yet
- Nuevo Plan de Estudios-Fiee PDFDocument5 pagesNuevo Plan de Estudios-Fiee PDFuncpfieeNo ratings yet
- Diseno Electrificacion Rural CorregidoDocument67 pagesDiseno Electrificacion Rural CorregidoJosé ArteagaNo ratings yet
- Elementos Basicos de WordDocument9 pagesElementos Basicos de WorduncpfieeNo ratings yet
- CuadriculadoDocument2 pagesCuadriculadouncpfieeNo ratings yet
- Sistemas de Potencia - Aná88Document32 pagesSistemas de Potencia - Aná88uncpfieeNo ratings yet
- Fuente SimetricaDocument6 pagesFuente SimetricauncpfieeNo ratings yet
- Solicito Practicas Pre-ProfecionalesDocument1 pageSolicito Practicas Pre-ProfecionalesuncpfieeNo ratings yet
- Flujo Optimo de PotenciaDocument26 pagesFlujo Optimo de PotenciauncpfieeNo ratings yet
- Sistemas de Potencia - Aná777Document25 pagesSistemas de Potencia - Aná777uncpfieeNo ratings yet
- Configuracion IP Wifi-UncpDocument2 pagesConfiguracion IP Wifi-UncpuncpfieeNo ratings yet
- Sistemas de Potencia - Aná777Document25 pagesSistemas de Potencia - Aná777uncpfieeNo ratings yet
- 1.1-Tec - Del Dis de Comp en Serie en Dom TiempoDocument138 pages1.1-Tec - Del Dis de Comp en Serie en Dom TiempoGisela Nateros MartinezNo ratings yet
- 1.1-Tec - Del Dis de Comp en Serie en Dom TiempoDocument138 pages1.1-Tec - Del Dis de Comp en Serie en Dom TiempoGisela Nateros MartinezNo ratings yet
- SOLICITUD DesmatriculaDocument1 pageSOLICITUD DesmatriculaMiguel Vargas H0% (1)
- Labor Maq IIDocument10 pagesLabor Maq IIuncpfieeNo ratings yet
- FormulacionDocument7 pagesFormulacionuncpfieeNo ratings yet
- Problem A Sinteres Simple 2Document9 pagesProblem A Sinteres Simple 2uncpfieeNo ratings yet
- 2080 - PR SPA - Vers OI 16-50Document60 pages2080 - PR SPA - Vers OI 16-50uncpfieeNo ratings yet
- Solicitud DesDocument1 pageSolicitud DesuncpfieeNo ratings yet
- CARTA de ACEPTACION - Practicas ProfesionalesDocument1 pageCARTA de ACEPTACION - Practicas ProfesionalesHaxel P. GarciaNo ratings yet
- Personajes Ilustres - Biografía de Santiago Antúnez de Mayolo - Universidad Nacional Mayor de San Marcos - UNMSMDocument3 pagesPersonajes Ilustres - Biografía de Santiago Antúnez de Mayolo - Universidad Nacional Mayor de San Marcos - UNMSMuncpfieeNo ratings yet
- (499879240) Restauracion-panel-a4-Leonn-CamayoDocument2 pages(499879240) Restauracion-panel-a4-Leonn-CamayouncpfieeNo ratings yet
- Horario Fiee 2013Document17 pagesHorario Fiee 2013Frank GalvanNo ratings yet
- MantaroDocument4 pagesMantaroronaldscriNo ratings yet
- Semana 7 - Regla de TresDocument9 pagesSemana 7 - Regla de TresEspinoza ErickNo ratings yet
- Verano César Vallejo Semana 03 - AritméticaDocument12 pagesVerano César Vallejo Semana 03 - AritméticaHECTOR CAMPOSNo ratings yet
- Disen o - Ciclo Basico SecundariaDocument31 pagesDisen o - Ciclo Basico SecundariaLoolaNo ratings yet
- Resumen Regla de TresDocument9 pagesResumen Regla de Tresmaria cuentasNo ratings yet
- Cuadernillo Ciencias 10ADocument40 pagesCuadernillo Ciencias 10AJarcox FirewolfNo ratings yet
- Urbanización en Tlaxcala-Apizaco. Capítulo VDocument25 pagesUrbanización en Tlaxcala-Apizaco. Capítulo VIsmael CuamatziNo ratings yet
- Cuadernillo Quinto 2022 Ibert OctubreDocument22 pagesCuadernillo Quinto 2022 Ibert OctubreIbert Francisco HernandezNo ratings yet
- Practica #4 2ºDocument5 pagesPractica #4 2ºMarleni Orbegoso LabrinNo ratings yet
- Matematica VI CicloDocument5 pagesMatematica VI CicloROSAMARIE POMA PEÑANo ratings yet
- FICHA 4 Matemática: Los Proyectos Mejoran Nuestra ComunidadDocument8 pagesFICHA 4 Matemática: Los Proyectos Mejoran Nuestra ComunidadBruno BeltranNo ratings yet
- Tema IDocument10 pagesTema Iornan floresNo ratings yet
- Tabla PeriodicaDocument3 pagesTabla Periodicahenry0% (1)
- Segundo Secundaria 1Document2 pagesSegundo Secundaria 1Euler Gomez PanduroNo ratings yet
- Práctica 1Document11 pagesPráctica 1Dustin AxelNo ratings yet
- EDO Eval I U 2b 202250Document9 pagesEDO Eval I U 2b 202250ADALBERTO JOSUE MONTERO CHUMBAYNo ratings yet
- Matriz CompetenciasDocument8 pagesMatriz CompetenciasFredy GamarraNo ratings yet
- Docslide - Us Informe Test de Bond FinalDocument22 pagesDocslide - Us Informe Test de Bond FinalAugusto FrezNo ratings yet
- Prueba 6º Entrada Matematica Sireva 2015 OkDocument15 pagesPrueba 6º Entrada Matematica Sireva 2015 OkSogei KatitaNo ratings yet
- Ley Combinada de Los GasesDocument8 pagesLey Combinada de Los GasesAdrianaEdithGonzalezNo ratings yet
- Indicadores de Logros 7° Misael CamachoDocument6 pagesIndicadores de Logros 7° Misael CamachoSalazar MisaelNo ratings yet
- Transicion de Peralte-CaminosDocument36 pagesTransicion de Peralte-CaminosManuelCardenazNo ratings yet
- Ejercicios de La Funci N LinealDocument14 pagesEjercicios de La Funci N LinealMauricio Ramirez HerreraNo ratings yet
- Clases Semana 19Document11 pagesClases Semana 19Lucia CuviNo ratings yet
- Magnitudes CompuestaDocument5 pagesMagnitudes CompuestaLiliana LagosNo ratings yet
- Contenidos 6to.Document11 pagesContenidos 6to.janettmelgar100% (1)
- On - Off PIDDocument30 pagesOn - Off PIDAsbel Taha Y-Katy VeraNo ratings yet
- Accin de ControlDocument1 pageAccin de ControlGoizane Alonso HolgadoNo ratings yet
- Relaciones Geométricas - Igualdad, Homotecia - Semejanza (Apuntes)Document3 pagesRelaciones Geométricas - Igualdad, Homotecia - Semejanza (Apuntes)Sergio BoggeroNo ratings yet