You might also like
- Chola MS: Motor Policy Schedule Cum Certificate of InsuranceDocument2 pagesChola MS: Motor Policy Schedule Cum Certificate of InsuranceSRI DURGA KEDARI0% (1)
- Introduction To Synthetic Aperture Sonar PDFDocument27 pagesIntroduction To Synthetic Aperture Sonar PDFnaivedya_mishraNo ratings yet
- Drypix 6000 12eDocument501 pagesDrypix 6000 12eraj_meditech100% (1)
- Nelson Tables All in One PDFDocument618 pagesNelson Tables All in One PDFAmulya Ramakrishna100% (7)
- Standard MissileDocument2 pagesStandard Missilemadox_3m100% (1)
- Telmisartan, ISMNDocument8 pagesTelmisartan, ISMNDenise EspinosaNo ratings yet
- Roadmap: B1+ Students' Book Audio ScriptsDocument44 pagesRoadmap: B1+ Students' Book Audio ScriptsThanh Dat Phan100% (4)
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- Denoising Techniques For Synthetic Aperture Radar Data - A ReviewDocument11 pagesDenoising Techniques For Synthetic Aperture Radar Data - A ReviewIAEME PublicationNo ratings yet
- Remote Sensing: Deep Learning For SAR Image DespecklingDocument20 pagesRemote Sensing: Deep Learning For SAR Image DespecklingCan AtalayNo ratings yet
- Imaging Radar Simulation in Realistic Environment Using Shooting and Bouncing Rays TechniqueDocument7 pagesImaging Radar Simulation in Realistic Environment Using Shooting and Bouncing Rays TechniqueAsd DsaNo ratings yet
- Dual-Tree Complex Wavelet Transform Based SAR Despeckling Using Interscale DependenceDocument9 pagesDual-Tree Complex Wavelet Transform Based SAR Despeckling Using Interscale DependenceNavdeep GoelNo ratings yet
- An Overview of SAR InterferometryDocument15 pagesAn Overview of SAR InterferometrySanjoy BasakNo ratings yet
- An Improved Edge Detection in SAR Color ImagesDocument5 pagesAn Improved Edge Detection in SAR Color ImagesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Measurement of The Spatial Frequency Response SFRDocument10 pagesMeasurement of The Spatial Frequency Response SFRpabloNo ratings yet
- Rajabi Specle Noise PDFDocument6 pagesRajabi Specle Noise PDFmalimarijoNo ratings yet
- Scale Space and Anisotropic Diffusion: Laplacian Gradient DivergenceDocument21 pagesScale Space and Anisotropic Diffusion: Laplacian Gradient DivergenceArkaprava BhowmikNo ratings yet
- Matas Bmvc02Document10 pagesMatas Bmvc02kkarthiksNo ratings yet
- Automatic Edgedetection SARimagesDocument14 pagesAutomatic Edgedetection SARimagesManasi NaikNo ratings yet
- A Denoising Algorithm For InSAR Surface Deformation AppilcationDocument5 pagesA Denoising Algorithm For InSAR Surface Deformation AppilcationSp LeeNo ratings yet
- Matas MSER PDFDocument10 pagesMatas MSER PDFTomislav LivnjakNo ratings yet
- Integration 2D Leslie ActaD1999Document7 pagesIntegration 2D Leslie ActaD1999Oscar FilippeschiNo ratings yet
- Liu 2017Document15 pagesLiu 2017AzizNo ratings yet
- Synthetic Aperture Radar Principles and Applications of AI in Automatic Target RecognitionDocument6 pagesSynthetic Aperture Radar Principles and Applications of AI in Automatic Target RecognitionoveiskntuNo ratings yet
- Isrm 11congress 2007 120Document4 pagesIsrm 11congress 2007 120rovinsonvazquezNo ratings yet
- Comparison of Edge Detectors: Ayaz Akram, Asad IsmailDocument9 pagesComparison of Edge Detectors: Ayaz Akram, Asad IsmailRamSharmaNo ratings yet
- Ijaret: ©iaemeDocument9 pagesIjaret: ©iaemeIAEME PublicationNo ratings yet
- Integrated Denoising and Unwrapping of Insar Phase Based On Markov Random FieldsDocument13 pagesIntegrated Denoising and Unwrapping of Insar Phase Based On Markov Random FieldsSakthidasan SankaranNo ratings yet
- Cutoff Rate and Signal Design For The Quasi-Static Rayleigh-Fading Space-Time ChannelDocument17 pagesCutoff Rate and Signal Design For The Quasi-Static Rayleigh-Fading Space-Time ChannelVijayShindeNo ratings yet
- Keuntungan Nambah PikselDocument5 pagesKeuntungan Nambah PikselNur RahmaNo ratings yet
- Multispectral Analysis of Satellite Images: AbstractDocument3 pagesMultispectral Analysis of Satellite Images: AbstractYanquiel Mansfarroll GonzalezNo ratings yet
- Introduction To Synthetic Aperture Sonar: Roy Edgar HansenDocument27 pagesIntroduction To Synthetic Aperture Sonar: Roy Edgar HansenKarelkatNo ratings yet
- Influence of Speckle Filtering On The Assessment of Agricultural Surface ParametersDocument3 pagesInfluence of Speckle Filtering On The Assessment of Agricultural Surface ParametersNguyen Ba DuyNo ratings yet
- inSAR Processing For DEM Generation PDFDocument8 pagesinSAR Processing For DEM Generation PDFJohn GkanatsiosNo ratings yet
- Niethammer2010 Dwi AtlasDocument12 pagesNiethammer2010 Dwi AtlasmarcniethammerNo ratings yet
- 重要-2008-Fabrizio Lombardini-3-D - SAR - Tomography - The - Multibaseline - Sector - Interpolation - ApproachDocument5 pages重要-2008-Fabrizio Lombardini-3-D - SAR - Tomography - The - Multibaseline - Sector - Interpolation - Approachchadavid1120No ratings yet
- Multifocal AntennaDocument5 pagesMultifocal AntennaLazni NalogNo ratings yet
- Image Segmentation by Using Edge DetectionDocument5 pagesImage Segmentation by Using Edge DetectionArivazhagan ArtNo ratings yet
- Bayesian Denoising of SAR Image: Y. Murali Mohan Babu, Dr. M.V. Subramanyam, Dr. M.N. Giri PrasadDocument3 pagesBayesian Denoising of SAR Image: Y. Murali Mohan Babu, Dr. M.V. Subramanyam, Dr. M.N. Giri PrasadsakethmohanNo ratings yet
- Sokos&Zahradnik Srl2013Document10 pagesSokos&Zahradnik Srl2013Buddy WalkerNo ratings yet
- Paper 3Document11 pagesPaper 3irjmssNo ratings yet
- IJE Volume 36 Issue 9 Pages 1589-1596 4Document8 pagesIJE Volume 36 Issue 9 Pages 1589-1596 4EXAM SECTIONNo ratings yet
- Sensors: Laser Sensors For Displacement, Distance and PositionDocument4 pagesSensors: Laser Sensors For Displacement, Distance and PositionLuis SánchezNo ratings yet
- Spatio-Temporal Saliency Based On Rare ModelDocument5 pagesSpatio-Temporal Saliency Based On Rare ModelSelva KumarNo ratings yet
- Mining Spectral Libraries To Study Sensors' Discrimination AbilityDocument9 pagesMining Spectral Libraries To Study Sensors' Discrimination AbilityLídia ValerioNo ratings yet
- Full Waveform Analysis For Long Range 3D Imaging Laser RadarDocument12 pagesFull Waveform Analysis For Long Range 3D Imaging Laser RadarmcgagliardiNo ratings yet
- Short 4Document7 pagesShort 4issam sayyafNo ratings yet
- Sar Tomography: An Advanced Tool For 4D Spaceborne Radar Scanning With Application To Imaging and Monitoring of Cities and Single BuildingsDocument9 pagesSar Tomography: An Advanced Tool For 4D Spaceborne Radar Scanning With Application To Imaging and Monitoring of Cities and Single BuildingsfakeNo ratings yet
- Dynamic Resolution of Image Edge Detection Technique Among Sobel, Log, and Canny AlgorithmsDocument5 pagesDynamic Resolution of Image Edge Detection Technique Among Sobel, Log, and Canny AlgorithmsijsretNo ratings yet
- Comparative Study of Edge Detection Algorithms Applying On The Grayscale Noisy Image Using Morphological FilterDocument7 pagesComparative Study of Edge Detection Algorithms Applying On The Grayscale Noisy Image Using Morphological FilterKenneth ReevesNo ratings yet
- Backprojection Autofocus For Synthetic Aperture RadarDocument7 pagesBackprojection Autofocus For Synthetic Aperture RadarkaredokNo ratings yet
- Sabor2 PDFDocument14 pagesSabor2 PDFlp111bjNo ratings yet
- Sipij 030606Document13 pagesSipij 030606sipijNo ratings yet
- Neuro-Fuzzy Synergism To The Intelligent System For Edge Detection and EnhancementDocument15 pagesNeuro-Fuzzy Synergism To The Intelligent System For Edge Detection and EnhancementsakthivelduraiNo ratings yet
- Spectral Mixture Analysis of Hyperspectral Remote Sensing DataDocument8 pagesSpectral Mixture Analysis of Hyperspectral Remote Sensing DataNish MarisNo ratings yet
- Image Compression Using Model: (EZW) E1'Document4 pagesImage Compression Using Model: (EZW) E1'vravisankarNo ratings yet
- HDR CFA Image RenderingDocument4 pagesHDR CFA Image RenderingJuanma FontNo ratings yet
- Efficient Stripmap SAR Raw Data Generation Taking Into Account Sensor Trajectory DeviationsDocument5 pagesEfficient Stripmap SAR Raw Data Generation Taking Into Account Sensor Trajectory Deviationsmani567No ratings yet
- A Fuzzy Graph-Based Segmentation For Marine and Maritime Applications in SAR ImagesDocument4 pagesA Fuzzy Graph-Based Segmentation For Marine and Maritime Applications in SAR ImagesMiqueias AmorimNo ratings yet
- Spacomm 2016 2 40 20009Document6 pagesSpacomm 2016 2 40 20009LêTiếnDungNo ratings yet
- Adaptive and Generic Corner Detection Based On The Accelerated Segment TestDocument14 pagesAdaptive and Generic Corner Detection Based On The Accelerated Segment Testqwerrty1029384756No ratings yet
- Principles of Synthetic Aperture RadarDocument12 pagesPrinciples of Synthetic Aperture RadarciaobubuNo ratings yet
- Automatic Crack Detection and Characterization During UltrasDocument6 pagesAutomatic Crack Detection and Characterization During Ultrasb3d.dharoharNo ratings yet
- VRC Sketch Radiance Caching For Participating MediaDocument1 pageVRC Sketch Radiance Caching For Participating MediaPavol IľkoNo ratings yet
- W1129Document16 pagesW1129Tamil VananNo ratings yet
- Cambridge Academic English Upper Intermediate DVD: An Integrated Skills Course For EAP by Martin Hewings Cef B2Document1 pageCambridge Academic English Upper Intermediate DVD: An Integrated Skills Course For EAP by Martin Hewings Cef B2Andrea FieldsNo ratings yet
- Lab S: Sampling and Aliasing: 0.1 Simple ExamplesDocument4 pagesLab S: Sampling and Aliasing: 0.1 Simple ExamplesAndrea FieldsNo ratings yet
- Assignment NOISE Lectures: Corbitt and Nergis Mavalvala and Write A Short Summary About The Methods ofDocument1 pageAssignment NOISE Lectures: Corbitt and Nergis Mavalvala and Write A Short Summary About The Methods ofAndrea FieldsNo ratings yet
- IntroductiontoMatlab Cse802Document20 pagesIntroductiontoMatlab Cse802Andrea FieldsNo ratings yet
- Lab 1 - DT Signals, Sampling, Frequency Entry Test Example QuestionsDocument2 pagesLab 1 - DT Signals, Sampling, Frequency Entry Test Example QuestionsAndrea FieldsNo ratings yet
- 9 HTK TutorialDocument17 pages9 HTK TutorialAndrea FieldsNo ratings yet
- Full Name: . Class: .Document2 pagesFull Name: . Class: .Andrea FieldsNo ratings yet
- Full Name: . Class: .Document3 pagesFull Name: . Class: .Andrea FieldsNo ratings yet
- The First Term Exam:) First Year Scientific StreamDocument3 pagesThe First Term Exam:) First Year Scientific StreamAndrea FieldsNo ratings yet
- Ipe - A Graphics Editor With L TEX Integration: Jan HlavacekDocument15 pagesIpe - A Graphics Editor With L TEX Integration: Jan HlavacekAndrea FieldsNo ratings yet
- Unit 24 - Lesson 36: Reading For Comprehension - Intensive ReadingDocument2 pagesUnit 24 - Lesson 36: Reading For Comprehension - Intensive ReadingAndrea FieldsNo ratings yet
- Tuerk-SV With Veridat Eurospeech03Document4 pagesTuerk-SV With Veridat Eurospeech03Andrea FieldsNo ratings yet
- The Cats Data: lm1 LM (HWT BWT Sex, Data Cats) lm1Document1 pageThe Cats Data: lm1 LM (HWT BWT Sex, Data Cats) lm1Andrea FieldsNo ratings yet
- Chapter Two Feasibility Study 2.0 Methods of Producing Ammonium Sulphate, ( (NH) SO)Document9 pagesChapter Two Feasibility Study 2.0 Methods of Producing Ammonium Sulphate, ( (NH) SO)Adeyoju RebeccaNo ratings yet
- Lesson 4Document10 pagesLesson 4Nagiri MuraliNo ratings yet
- Commissioning/Troubleshooting: Check List: C B A Yellow Grey Black TBPDocument2 pagesCommissioning/Troubleshooting: Check List: C B A Yellow Grey Black TBPmohamedNo ratings yet
- CF1900SS-DF Example Spec - Rev1Document1 pageCF1900SS-DF Example Spec - Rev1parsiti unnesNo ratings yet
- Relay Identification: Example CDG31FF002SACHDocument5 pagesRelay Identification: Example CDG31FF002SACHRohit RanaNo ratings yet
- QW PDFDocument45 pagesQW PDFkarthikeyan PNo ratings yet
- Foods 09 01560 PDFDocument10 pagesFoods 09 01560 PDFkim cheNo ratings yet
- Chapter 5 Pneumatic and Hydraulic Actuation SystemsDocument22 pagesChapter 5 Pneumatic and Hydraulic Actuation SystemsMukhammad FauzyNo ratings yet
- MultiCrystallineDataSheet - EN - SilikenDocument4 pagesMultiCrystallineDataSheet - EN - Silikensydneyaus2005No ratings yet
- Classification of Tooth StainingDocument4 pagesClassification of Tooth StainingYAMUNA M.D.S. PAEDODONTICS & PREVENTIVE DENTISTRYNo ratings yet
- Gummetal Zastosowania Kliniczne 0Document8 pagesGummetal Zastosowania Kliniczne 0ΑΛΕΞΑΝΔΡΟΣ ΣΤΕΦΑΝΗΣNo ratings yet
- 7UM512 CatalogueDocument12 pages7UM512 Cataloguebuianhtuan1980No ratings yet
- Water Treatment Lecture 4Document34 pagesWater Treatment Lecture 4pramudita nadiahNo ratings yet
- Application of Land Suitability AnalysisDocument16 pagesApplication of Land Suitability AnalysisHải Anh Nguyễn100% (1)
- PRICELIST E Katalogs IVD 06042023 INDOPUTRA - PDF TerbaruDocument6 pagesPRICELIST E Katalogs IVD 06042023 INDOPUTRA - PDF Terbaruseksi sspk sarprasNo ratings yet
- Prince Hydraulics Wolverine Adjustable Flow Control Valve Offered by PRC Industrial SupplyDocument1 pagePrince Hydraulics Wolverine Adjustable Flow Control Valve Offered by PRC Industrial SupplyPRC Industrial SupplyNo ratings yet
- Kim, KDM, Sim, SDM PDFDocument12 pagesKim, KDM, Sim, SDM PDFKavan Gt12No ratings yet
- Project Final PDFDocument98 pagesProject Final PDFNgonidzashe MhukaNo ratings yet
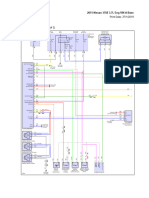
- 2015 Nissan 370Z 3.7L Eng VIN A BaseDocument69 pages2015 Nissan 370Z 3.7L Eng VIN A BaseData TécnicaNo ratings yet
- Geo-Technical Investigation On Black Cotton Soils: GeotechnicalinvestigationonblackcottonsoilsDocument5 pagesGeo-Technical Investigation On Black Cotton Soils: GeotechnicalinvestigationonblackcottonsoilsDevendrasinh PadhiyarNo ratings yet
- Heart of Dankness by Mark Haskell Smith - ExcerptDocument29 pagesHeart of Dankness by Mark Haskell Smith - ExcerptCrown Publishing GroupNo ratings yet
- Heil 4000 FeaturesDocument1 pageHeil 4000 FeaturesBogdan NgrNo ratings yet
- Eye Examination: Dr. Seng Serey / Prof .Kenn Freedman Prof - Kong PisethDocument78 pagesEye Examination: Dr. Seng Serey / Prof .Kenn Freedman Prof - Kong PisethSela KHNo ratings yet
- Lesson Plan 1 - Agriculture in Your LifeDocument6 pagesLesson Plan 1 - Agriculture in Your Lifeapi-235918896No ratings yet