You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- M230enbr AaDocument8 pagesM230enbr Aajaved shaikh chaandNo ratings yet
- M N 2Document2 pagesM N 2Небојша МитровићNo ratings yet
- Technicalguidebook 1 10 en ReveDocument446 pagesTechnicalguidebook 1 10 en RevetheerawsNo ratings yet
- F700 Quick Set Up GuideDocument2 pagesF700 Quick Set Up GuideНебојша МитровићNo ratings yet
- Education DTC 380 PDFDocument6 pagesEducation DTC 380 PDFНебојша МитровићNo ratings yet
- 1451 48690501093V PDFDocument24 pages1451 48690501093V PDFНебојша МитровићNo ratings yet
- AC-machine With Frequency Converter With Immunity To Voltage DipsDocument5 pagesAC-machine With Frequency Converter With Immunity To Voltage DipsНебојша МитровићNo ratings yet
- DC Bus ParallelingDocument20 pagesDC Bus ParallelingНебојша МитровићNo ratings yet
- 2 Transformer Sizing CalculationDocument5 pages2 Transformer Sizing CalculationSamant SauravNo ratings yet
- N3ational Certification Examination 2004Document8 pagesN3ational Certification Examination 2004Brahmananda TaraiNo ratings yet
- Regulation For Installation and Maintenance of Metering SystemsDocument38 pagesRegulation For Installation and Maintenance of Metering Systemsnp1101992No ratings yet
- 1.coordinated Control of Grid-Connected Photovoltaic Reactive Power and Battery Energy Storage SDocument11 pages1.coordinated Control of Grid-Connected Photovoltaic Reactive Power and Battery Energy Storage SDMarcus115No ratings yet
- Catalogo Fuentes MWDocument100 pagesCatalogo Fuentes MWCharles TineoNo ratings yet
- Tai Sin Busway Catalogue 2019Document34 pagesTai Sin Busway Catalogue 2019Ngọc TrầnNo ratings yet
- EE8552 Unit-5Document48 pagesEE8552 Unit-5balafetNo ratings yet
- 26 09 13 Electrical Power Monitoring System - Data CentersDocument35 pages26 09 13 Electrical Power Monitoring System - Data CentersHujiLokoNo ratings yet
- Catalogue LEVER Power Solutions en 2017Document80 pagesCatalogue LEVER Power Solutions en 2017bhaskarjalanNo ratings yet
- Ac DC Power System Analysis Arrillaga, - JosDocument328 pagesAc DC Power System Analysis Arrillaga, - Josdjsb0067% (6)
- Product Data Sheet 3RT1044-1AK60: CONTACTOR, AC-3 30 KW/400 V, AC 110V 50HZ/120V 60HZ 3-POLE, SIZE S3, Screw ConnectionDocument4 pagesProduct Data Sheet 3RT1044-1AK60: CONTACTOR, AC-3 30 KW/400 V, AC 110V 50HZ/120V 60HZ 3-POLE, SIZE S3, Screw ConnectionmalekNo ratings yet
- Basic Electrical and Electronics EngineeringDocument2 pagesBasic Electrical and Electronics EngineeringDharani KumarNo ratings yet
- WDG 12 - Technical Data Sheet LV 804 XDocument8 pagesWDG 12 - Technical Data Sheet LV 804 XAmmar BaigNo ratings yet
- KVAh FAQsDocument5 pagesKVAh FAQsHemantNo ratings yet
- Lecture 20 PDFDocument12 pagesLecture 20 PDFRana Zeeshan UmerNo ratings yet
- Kilowatts (KW) To Volt-Amps (VA) Electrical ConveDocument1 pageKilowatts (KW) To Volt-Amps (VA) Electrical ConveLoay AlhanbalyNo ratings yet
- RectifierDocument10 pagesRectifierMahmoudA.AbdlsalamNo ratings yet
- Powerware UPS Product CatalogDocument28 pagesPowerware UPS Product Catalogjosebolis6550No ratings yet
- LAB6 EnaDocument13 pagesLAB6 EnaLaiba ShahzadNo ratings yet
- 8202-031 and 531 Electrical Theory Exam Spring 2017-pdf - AshxDocument10 pages8202-031 and 531 Electrical Theory Exam Spring 2017-pdf - Ashxnkxqbwqk22No ratings yet
- Samsung Plasma Training ManualDocument57 pagesSamsung Plasma Training Manualedsel72100% (2)
- Material and Equipment Standard For Arc Welding Equipment and AccessoriesDocument27 pagesMaterial and Equipment Standard For Arc Welding Equipment and AccessoriesRezaNo ratings yet
- SG3K-D/SG5K-D: String InverterDocument2 pagesSG3K-D/SG5K-D: String InverterMohamed El-sirNo ratings yet
- IES - Electronics Engineering - Network Theory PDFDocument83 pagesIES - Electronics Engineering - Network Theory PDFRaj KamalNo ratings yet
- PM2100 Family - User Guide PDFDocument78 pagesPM2100 Family - User Guide PDFdeskinielNo ratings yet
- IEC Standards & Power Factor CorrectionDocument165 pagesIEC Standards & Power Factor CorrectionArokia Kupri100% (3)
- Power Logic PM 1000 - DM 6000Document8 pagesPower Logic PM 1000 - DM 6000Thaynara LamounierNo ratings yet
- Attention: AAD03011 Instruction ManualDocument103 pagesAttention: AAD03011 Instruction ManualyounesNo ratings yet
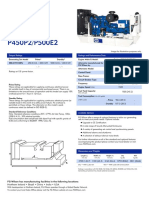
- P450P2 P500e2 (4PP) GB (0910)Document4 pagesP450P2 P500e2 (4PP) GB (0910)Juanita Pardo MirandaNo ratings yet