You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Modelling Discontinuous Rock With FLAC and UDECDocument50 pagesModelling Discontinuous Rock With FLAC and UDECAbhishek P SaiNo ratings yet
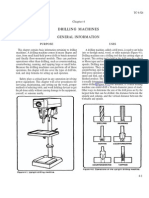
- Chapter 4 Drilling MachinesDocument24 pagesChapter 4 Drilling MachinesPRASAD326100% (14)
- Linear Elastic Solids: RD - Mech@yahoo - Co.in Ramadas ChennamsettiDocument23 pagesLinear Elastic Solids: RD - Mech@yahoo - Co.in Ramadas Chennamsettird_mechNo ratings yet
- Grinding Machine PDFDocument23 pagesGrinding Machine PDFNagi NayakNo ratings yet
- Nicholas W. Tschoegl (Auth.) - The Phenomenological Theory of Linear Viscoelastic Behavior - An Introduction-Springer-Verlag Berlin Heidelberg (1989) PDFDocument790 pagesNicholas W. Tschoegl (Auth.) - The Phenomenological Theory of Linear Viscoelastic Behavior - An Introduction-Springer-Verlag Berlin Heidelberg (1989) PDFulysesrrNo ratings yet
- Sonoco Tube TestingDocument10 pagesSonoco Tube TestingTes PlastNo ratings yet
- Soil Structure InteractionDocument20 pagesSoil Structure Interactionafsajghfd1No ratings yet
- ATENA - Theory Nonlinear RCDocument282 pagesATENA - Theory Nonlinear RCPreloxNo ratings yet
- The Advance Metalworking LatheDocument6 pagesThe Advance Metalworking LathePronina100% (1)
- DrillDocument1 pageDrillProninaNo ratings yet
- ТЭФ ВКРDocument2 pagesТЭФ ВКРProninaNo ratings yet
- НТБDocument8 pagesНТБPronina100% (1)
- Online Selection ExamplesDocument2 pagesOnline Selection ExamplesProninaNo ratings yet
- CompositesDocument7 pagesCompositesPronina100% (4)
- TorsionDocument14 pagesTorsionProninaNo ratings yet
- ReferenceDocument1 pageReferenceProninaNo ratings yet
- Chap 8Document11 pagesChap 8Michael Chuquiruna MuñozNo ratings yet
- Dimensionless Correlation For Sand Erosion of Families of Polymers PDFDocument4 pagesDimensionless Correlation For Sand Erosion of Families of Polymers PDFmoromartinsNo ratings yet
- LAD01163 Continnuum Mechanis CasoDocument6 pagesLAD01163 Continnuum Mechanis Casokeron nilesNo ratings yet
- Hypoplasticity PowerpointDocument163 pagesHypoplasticity PowerpointJuan AcostaNo ratings yet
- 122 TD4Document15 pages122 TD4Sebastiao SilvaNo ratings yet
- Advanced Hydrogeology PoroelasticityDocument52 pagesAdvanced Hydrogeology PoroelasticityBismarck GomesNo ratings yet
- Introduction to Nonlinear AnalysisDocument3 pagesIntroduction to Nonlinear AnalysisJorge Luis Garcia ZuñigaNo ratings yet
- Orthotropic Linear Elasticity LectureDocument13 pagesOrthotropic Linear Elasticity LectureGustavoNo ratings yet
- New Softening-Hardening Material Model in RS2Document8 pagesNew Softening-Hardening Material Model in RS2Anonymous D5s00DdUNo ratings yet
- Introduction To Nonlinear ElasticityDocument100 pagesIntroduction To Nonlinear Elasticitymathlouthi safaNo ratings yet
- Lecture 12Document19 pagesLecture 12Arpit DodiaNo ratings yet
- MET201 Mechanics of Solids - Generalized Hooke’s Law and Elastic ConstantsDocument19 pagesMET201 Mechanics of Solids - Generalized Hooke’s Law and Elastic ConstantsjoeyNo ratings yet
- Modelling Resilient Modulus of JKR's Crushed Rock Base MaterialDocument8 pagesModelling Resilient Modulus of JKR's Crushed Rock Base Materialpave_manNo ratings yet
- Capitulo 2 y 3Document49 pagesCapitulo 2 y 3Marco GuerreroNo ratings yet
- Tool Model Building and Research On Cutting Simulation Experiment of Ti6Al4VDocument21 pagesTool Model Building and Research On Cutting Simulation Experiment of Ti6Al4VhaceneNo ratings yet
- ME803 Continuum Mech. - Lec 1 - IntroductionDocument26 pagesME803 Continuum Mech. - Lec 1 - IntroductionAsif RahmanNo ratings yet
- ME803 SPRING 2021: Continuum MechanicsDocument27 pagesME803 SPRING 2021: Continuum MechanicsMuhammad Abdullah MeharNo ratings yet
- Combined Effect of Damage and Plastic Anisotropy On The Ductility Limit of Thin Metal SheetsDocument8 pagesCombined Effect of Damage and Plastic Anisotropy On The Ductility Limit of Thin Metal SheetsKrunal MoreyNo ratings yet
- Lecture 01Document22 pagesLecture 01Stefanos van DijkNo ratings yet
- Simplified Damage Plasticity Model For ConcreteDocument11 pagesSimplified Damage Plasticity Model For ConcreteTeo Peng KeatNo ratings yet
- Development of Constitutive Equations For Continuum, Beams and PlatesDocument10 pagesDevelopment of Constitutive Equations For Continuum, Beams and PlatesBhavya AnoohyaNo ratings yet
- A Simplified Deformation Gradient Theory and Its eDocument23 pagesA Simplified Deformation Gradient Theory and Its eSam GeraghtyNo ratings yet
- Class 12-13 Piezoelectric Materials-2Document13 pagesClass 12-13 Piezoelectric Materials-2ChandraKiranNo ratings yet
- BME 456 - Constitutive Equations - ElasticityDocument29 pagesBME 456 - Constitutive Equations - ElasticityhamimNo ratings yet
- Constitutive Equations in Continuum MechanicsDocument14 pagesConstitutive Equations in Continuum MechanicsahishbNo ratings yet