You might also like
- 3.electrical SystemDocument10 pages3.electrical SystemAntonio UrcuyoNo ratings yet
- McDonnell Douglas DC 10 40 ElectricalDocument24 pagesMcDonnell Douglas DC 10 40 ElectricalEhsan Ul HaqueNo ratings yet
- Script - Power PointDocument4 pagesScript - Power PointmonicaNo ratings yet
- Aircraft Electrical Power Systems Simulation Using MATLABDocument9 pagesAircraft Electrical Power Systems Simulation Using MATLABRifdian AntoNo ratings yet
- SysML Inverted Pendulum SystemDocument17 pagesSysML Inverted Pendulum SystemAnonymous Xv4ESVhYUNo ratings yet
- Ata 24 B757Document268 pagesAta 24 B757Zeus Eqab50% (2)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Block Diagram of Electromechanical SystemDocument20 pagesBlock Diagram of Electromechanical SystemSandeep ReddyNo ratings yet
- Steering ElectronicDocument18 pagesSteering ElectronicpricopdanielNo ratings yet
- Control Tutorials For MATLAB and Simulink - Motor Speed - System ModelingDocument6 pagesControl Tutorials For MATLAB and Simulink - Motor Speed - System Modelingdisposable505No ratings yet
- Association of Batteries and Supercapacitors To Supply A Micro-Hybrid VehicleDocument6 pagesAssociation of Batteries and Supercapacitors To Supply A Micro-Hybrid VehicleEdu Daryl MacerenNo ratings yet
- Finite State Machines: Finite State Machine Next-State FunctionDocument5 pagesFinite State Machines: Finite State Machine Next-State FunctionAnish MathewNo ratings yet
- Aircraft Electrical Systems Manual ChapterDocument56 pagesAircraft Electrical Systems Manual ChapterIonut Ciprian CojocaruNo ratings yet
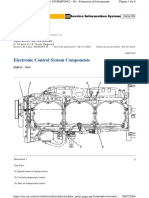
- Electronic Control System ComponentsDocument4 pagesElectronic Control System ComponentsThein Htoon lwinNo ratings yet
- Transient Stability Analysis of Power System Using MatlabDocument5 pagesTransient Stability Analysis of Power System Using MatlabSaddam HussainNo ratings yet
- The Speed Control of PMSMDocument5 pagesThe Speed Control of PMSMMehmet KırgözoğluNo ratings yet
- Vhdl-Ams Modeling of An Automotive Vibration Isolation Seating SystemDocument5 pagesVhdl-Ams Modeling of An Automotive Vibration Isolation Seating SystemKoti Subba Nara ArjunNo ratings yet
- MAN B&W Diesel ECSDocument15 pagesMAN B&W Diesel ECSmicudan100% (1)
- FS Station Tutorial Explains C-130 FlightDocument20 pagesFS Station Tutorial Explains C-130 FlightJulian Esteban CardenasNo ratings yet
- Automatic Generation ControlDocument5 pagesAutomatic Generation ControlMuhammad Nizamuddin100% (1)
- Lab 1Document4 pagesLab 1Abdalla Fathy100% (1)
- Electronic Control System Components C27Document6 pagesElectronic Control System Components C27insano008No ratings yet
- Bala ProjectDocument7 pagesBala ProjectKaruna Reddy YennapusaNo ratings yet
- Controls Lab Report-1 ModelingDocument5 pagesControls Lab Report-1 ModelingMahin AkhtarNo ratings yet
- Module - 2Document9 pagesModule - 2AshwiniNo ratings yet
- PLC Speed Control of AC Motors With VSDDocument6 pagesPLC Speed Control of AC Motors With VSDManuel Henríquez SantanaNo ratings yet
- B767 ATA 24 Student BookDocument73 pagesB767 ATA 24 Student BookElijah Paul Merto100% (6)
- Modeling and Simulation of The DC Motor Using Matlab and LabviewDocument6 pagesModeling and Simulation of The DC Motor Using Matlab and LabviewnghiepmechanNo ratings yet
- 1574744335252-Je Ldce2Document44 pages1574744335252-Je Ldce2Ponnurangam VeluNo ratings yet
- BLDC SimulationDocument4 pagesBLDC SimulationSiva GuruNo ratings yet
- Modelling BLDC Motor Drive Using Sensored and Sensorless ControlDocument10 pagesModelling BLDC Motor Drive Using Sensored and Sensorless ControlvishiwizardNo ratings yet
- Pi Control System Based Speed Control of DC Motor Using MicrocontrollerDocument13 pagesPi Control System Based Speed Control of DC Motor Using MicrocontrollerAnkit BhardwajNo ratings yet
- UPS SystemDocument4 pagesUPS SystemMadhu JbNo ratings yet
- ETAP User Guide 7 0Document448 pagesETAP User Guide 7 0mrivero1983No ratings yet
- Ata 24 Electrical Power PDFDocument67 pagesAta 24 Electrical Power PDFAaron Harvey75% (4)
- 5.CS Lab Manual R14Document80 pages5.CS Lab Manual R14Kh KhalilNo ratings yet
- DC MotorDocument5 pagesDC Motorjiwani87No ratings yet
- Investigation On The Dual Functions of Generator As Reactive Power SupportDocument5 pagesInvestigation On The Dual Functions of Generator As Reactive Power SupportJAMESJANUSGENIUS5678No ratings yet
- Excitation SystemDocument13 pagesExcitation SystemKVVNo ratings yet
- Simulation of D.C. Machines Transient Behaviors: Teaching and ResearchDocument7 pagesSimulation of D.C. Machines Transient Behaviors: Teaching and ResearchJames SilvaNo ratings yet
- Unit 5 Excitation Control: Unit 5.1 Basic Informations of Systems Unit 5.2 Electronic Excitation SystemDocument19 pagesUnit 5 Excitation Control: Unit 5.1 Basic Informations of Systems Unit 5.2 Electronic Excitation SystemBala RajuNo ratings yet
- SENR6982 - Systems Operation PDFDocument14 pagesSENR6982 - Systems Operation PDFmetanirvanaNo ratings yet
- b777 ELECTRICAL SYSTEM PDFDocument8 pagesb777 ELECTRICAL SYSTEM PDFmsbantel65410% (1)
- PLC Application For Speed Control of AC Motors With Variable Speed VS DriveDocument5 pagesPLC Application For Speed Control of AC Motors With Variable Speed VS DriveLevi FondaNo ratings yet
- U17AEI7203 Lecture 5Document7 pagesU17AEI7203 Lecture 5SenthilKumarSNo ratings yet
- c108 - WWW - Matlabi.ir - DC Motor Position Control Using State Space TechniqueDocument6 pagesc108 - WWW - Matlabi.ir - DC Motor Position Control Using State Space TechniqueMuhammad Ahsan AyubNo ratings yet
- DC Motor Speed Transfer Function and State-Space ModelingDocument13 pagesDC Motor Speed Transfer Function and State-Space ModelingMohamed Elsayed HarbNo ratings yet
- Componentes Del Sistema de Control ElectronicoDocument6 pagesComponentes Del Sistema de Control ElectronicoLuis TepezanoNo ratings yet
- Electrical E1Document57 pagesElectrical E1Ratna Kumar100% (1)
- C15 Electronic Control SystemDocument5 pagesC15 Electronic Control SystemTakaNo ratings yet
- Upec 2Document7 pagesUpec 2manjusingNo ratings yet
- UPS SystemDocument4 pagesUPS Systemमृत्युंजय झाNo ratings yet
- Techteach - No Simview DC Motor IndexDocument3 pagesTechteach - No Simview DC Motor IndexDiabloNo ratings yet
- Eec - Pcu - FadecDocument9 pagesEec - Pcu - FadecWilliam XavierNo ratings yet
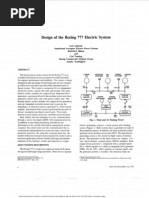
- Design of Boeing 777 Electrical System IEEE AES Magazine July 1992Document8 pagesDesign of Boeing 777 Electrical System IEEE AES Magazine July 1992pwc2102No ratings yet
- Improvement of Performance - FullDocument8 pagesImprovement of Performance - FullTJPRC PublicationsNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Use Expansion Peds ManualDocument16 pagesUse Expansion Peds ManualHotesse De L'air InfohasNo ratings yet
- Nasa Sobre El Uso de Dispositivos Electronicos PortatilesDocument28 pagesNasa Sobre El Uso de Dispositivos Electronicos Portatilesnosferatus_18No ratings yet
- Nasa Sobre El Uso de Dispositivos Electronicos PortatilesDocument28 pagesNasa Sobre El Uso de Dispositivos Electronicos Portatilesnosferatus_18No ratings yet
- Use Expansion Peds ManualDocument16 pagesUse Expansion Peds ManualHotesse De L'air InfohasNo ratings yet
- Use Expansion Peds ManualDocument16 pagesUse Expansion Peds ManualHotesse De L'air InfohasNo ratings yet
- Hauppauge NY Office Contact DetailsDocument3 pagesHauppauge NY Office Contact DetailsLuis Antonio Reyes GarciaNo ratings yet
- DC Motor Dynamics Data Acquisition, Parameters Estimation and Implementation of Cascade ControlDocument5 pagesDC Motor Dynamics Data Acquisition, Parameters Estimation and Implementation of Cascade ControlAlisson Magalhães Silva MagalhãesNo ratings yet
- PESO Online Explosives-Returns SystemDocument1 pagePESO Online Explosives-Returns Systemgirinandini0% (1)
- IoT BASED HEALTH MONITORING SYSTEMDocument18 pagesIoT BASED HEALTH MONITORING SYSTEMArunkumar Kuti100% (2)
- Briana SmithDocument3 pagesBriana SmithAbdul Rafay Ali KhanNo ratings yet
- Propiedades Grado 50 A572Document2 pagesPropiedades Grado 50 A572daniel moreno jassoNo ratings yet
- Brick TiesDocument15 pagesBrick TiesengrfarhanAAANo ratings yet
- تاااتتاااDocument14 pagesتاااتتاااMegdam Sameeh TarawnehNo ratings yet
- FX15Document32 pagesFX15Jeferson MarceloNo ratings yet
- Water Jet CuttingDocument15 pagesWater Jet CuttingDevendar YadavNo ratings yet
- Attributes and DialogsDocument29 pagesAttributes and DialogsErdenegombo MunkhbaatarNo ratings yet
- Orc & Goblins VII - 2000pts - New ABDocument1 pageOrc & Goblins VII - 2000pts - New ABDave KnattNo ratings yet
- Pom Final On Rice MillDocument21 pagesPom Final On Rice MillKashif AliNo ratings yet
- Main Research PaperDocument11 pagesMain Research PaperBharat DedhiaNo ratings yet
- Marketing Plan for Monuro Clothing Store Expansion into CroatiaDocument35 pagesMarketing Plan for Monuro Clothing Store Expansion into CroatiaMuamer ĆimićNo ratings yet
- Leaked David Fry II Conversation Regarding Loopholes and Embezzlement at AFK Gamer LoungeDocument6 pagesLeaked David Fry II Conversation Regarding Loopholes and Embezzlement at AFK Gamer LoungeAnonymous iTNFz0a0No ratings yet
- GIS Multi-Criteria Analysis by Ordered Weighted Averaging (OWA) : Toward An Integrated Citrus Management StrategyDocument17 pagesGIS Multi-Criteria Analysis by Ordered Weighted Averaging (OWA) : Toward An Integrated Citrus Management StrategyJames DeanNo ratings yet
- Kami Export - BuildingtheTranscontinentalRailroadWEBQUESTUsesQRCodes-1Document3 pagesKami Export - BuildingtheTranscontinentalRailroadWEBQUESTUsesQRCodes-1Anna HattenNo ratings yet
- TOGAF 9 Foundation Part 1 Exam Preparation GuideDocument114 pagesTOGAF 9 Foundation Part 1 Exam Preparation GuideRodrigo Maia100% (3)
- Ujian Madrasah Kelas VIDocument6 pagesUjian Madrasah Kelas VIrahniez faurizkaNo ratings yet
- STAT100 Fall19 Test 2 ANSWERS Practice Problems PDFDocument23 pagesSTAT100 Fall19 Test 2 ANSWERS Practice Problems PDFabutiNo ratings yet
- Lifespan Development Canadian 6th Edition Boyd Test BankDocument57 pagesLifespan Development Canadian 6th Edition Boyd Test Bankshamekascoles2528zNo ratings yet
- Tigo Pesa Account StatementDocument7 pagesTigo Pesa Account StatementPeter Ngicur Carthemi100% (1)
- WSP Global EnvironmentDocument20 pagesWSP Global EnvironmentOrcunNo ratings yet
- ITU SURVEY ON RADIO SPECTRUM MANAGEMENT 17 01 07 Final PDFDocument280 pagesITU SURVEY ON RADIO SPECTRUM MANAGEMENT 17 01 07 Final PDFMohamed AliNo ratings yet
- Nama: Yetri Muliza Nim: 180101152 Bahasa Inggris V Reading Comprehension A. Read The Text Carefully and Answer The Questions! (40 Points)Document3 pagesNama: Yetri Muliza Nim: 180101152 Bahasa Inggris V Reading Comprehension A. Read The Text Carefully and Answer The Questions! (40 Points)Yetri MulizaNo ratings yet
- Astera Data Integration BootcampDocument4 pagesAstera Data Integration BootcampTalha MehtabNo ratings yet
- IGCSE Chemistry Section 5 Lesson 3Document43 pagesIGCSE Chemistry Section 5 Lesson 3Bhawana SinghNo ratings yet
- Archlinux 之 之 之 之 Lmap 攻 略 ( 攻 略 ( 攻 略 ( 攻 略 ( 1 、 环 境 准 备 ) 、 环 境 准 备 ) 、 环 境 准 备 ) 、 环 境 准 备 )Document16 pagesArchlinux 之 之 之 之 Lmap 攻 略 ( 攻 略 ( 攻 略 ( 攻 略 ( 1 、 环 境 准 备 ) 、 环 境 准 备 ) 、 环 境 准 备 ) 、 环 境 准 备 )Goh Ka WeeNo ratings yet
- ESA Knowlage Sharing - Update (Autosaved)Document20 pagesESA Knowlage Sharing - Update (Autosaved)yared BerhanuNo ratings yet