You might also like
- Ferroresonance During Single-Phase Switching of Distribution TransformersDocument6 pagesFerroresonance During Single-Phase Switching of Distribution TransformersDiego Betancourt MejiaNo ratings yet
- Accessories - HeatsinksDocument3 pagesAccessories - Heatsinkstheodorakis017781No ratings yet
- BASIC OPERATING PRINCIPLES AND PILOT PROTOTYPE DEVELOPMENTDocument8 pagesBASIC OPERATING PRINCIPLES AND PILOT PROTOTYPE DEVELOPMENTtheodorakis017781No ratings yet
- Fast Circuit Simulation On Graphics Processing UniDocument7 pagesFast Circuit Simulation On Graphics Processing Unitheodorakis017781No ratings yet
- Tunnel Diode Transistor IcsDocument158 pagesTunnel Diode Transistor Icstheodorakis017781No ratings yet
- Explosive Pulsed Power - Experimental Capability at LLNLDocument9 pagesExplosive Pulsed Power - Experimental Capability at LLNLtheodorakis017781No ratings yet
- Homopolar Motor With Liquid Metal BrushesDocument7 pagesHomopolar Motor With Liquid Metal Brushestheodorakis017781No ratings yet
- High Power IgnitronsDocument145 pagesHigh Power Ignitronstheodorakis017781No ratings yet
- 6 Meter GS-35B Amplifier ConstructionDocument3 pages6 Meter GS-35B Amplifier Constructiontheodorakis017781No ratings yet
- Electronic Tubers & Construction PDFDocument7 pagesElectronic Tubers & Construction PDFtheodorakis017781No ratings yet
- Reluctance MotorDocument14 pagesReluctance Motortheodorakis017781No ratings yet
- SRM449TN 450Document2 pagesSRM449TN 450theodorakis017781No ratings yet
- Real-Time Simulation and Control of Reluctance MOTOR DRIVES at HIGH SPEEDDocument7 pagesReal-Time Simulation and Control of Reluctance MOTOR DRIVES at HIGH SPEEDtheodorakis017781No ratings yet
- Compact Pulsed PowerDocument1 pageCompact Pulsed Powertheodorakis017781No ratings yet
- Advances in Pulsed Power Technology 1-Opening Switches PDFDocument321 pagesAdvances in Pulsed Power Technology 1-Opening Switches PDFtheodorakis017781100% (1)
- Complete Us Patents of Nikola TeslaDocument499 pagesComplete Us Patents of Nikola TeslaBibleNut777No ratings yet
- Gigawatt Pulsed Power PDFDocument95 pagesGigawatt Pulsed Power PDFtheodorakis017781No ratings yet
- Sharing Battery Knowledge The Battery Univercity PDFDocument146 pagesSharing Battery Knowledge The Battery Univercity PDFtheodorakis017781No ratings yet
- Motor Selection ProceduresDocument80 pagesMotor Selection Procedurestheodorakis017781No ratings yet
- Tesla Coils and The Failure of Lumped-Element Circuit TheoryDocument9 pagesTesla Coils and The Failure of Lumped-Element Circuit Theorytheodorakis017781100% (1)
- Searl's Searl Effect Generator (SEG)Document130 pagesSearl's Searl Effect Generator (SEG)Chandan Kishore Chutia100% (5)
- Analysis of Beam Ray MachineDocument6 pagesAnalysis of Beam Ray Machinetheodorakis017781No ratings yet
- Distributed Integrated CircuitsDocument5 pagesDistributed Integrated Circuitstheodorakis017781No ratings yet
- Single Transistor Crystal Oscillator CircuitsDocument3 pagesSingle Transistor Crystal Oscillator CircuitsNiko GlamuzinaNo ratings yet
- Otto Rahn: Invisible RadiationsDocument230 pagesOtto Rahn: Invisible RadiationsDawne_Berry100% (1)
- Wideband AmplifiersDocument2 pagesWideband Amplifierstheodorakis017781100% (1)
- New Energy Technologies From Scalar FieldsDocument18 pagesNew Energy Technologies From Scalar FieldsPopovici Aurel DanNo ratings yet
- Water-Powered Cars & Inventors KilledDocument7 pagesWater-Powered Cars & Inventors Killedtheodorakis017781No ratings yet
- 1990 Signetics PLD Data HandbookDocument810 pages1990 Signetics PLD Data Handbooktheodorakis017781No ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Final Exam Questions - Electrical Fundamentals 2Document12 pagesFinal Exam Questions - Electrical Fundamentals 2Ahyad Arif Abdul Rahman100% (2)
- Concept of Power SystemDocument29 pagesConcept of Power SystemZiyad MohammedNo ratings yet
- Wound Rotor Repair Tips: Testing, Application and Failure AnalysisDocument14 pagesWound Rotor Repair Tips: Testing, Application and Failure Analysishino_kaguNo ratings yet
- DPDC EEE SolutionDocument8 pagesDPDC EEE Solutionmaruf048100% (1)
- Tutorial 2 (Answer)Document9 pagesTutorial 2 (Answer)NAYAB HASSANo ratings yet
- YL-195 Motor - Electric Traction & Electrical Control Trainer - YALONG (China) - Education Appliances - Office Supplies Products - DIYTradeDocument3 pagesYL-195 Motor - Electric Traction & Electrical Control Trainer - YALONG (China) - Education Appliances - Office Supplies Products - DIYTradeOmar HayatNo ratings yet
- C2000D6Document4 pagesC2000D6Gestión del Talento Humano GEMRANo ratings yet
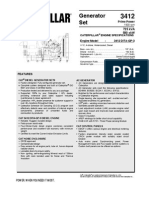
- Generator 3412 Set Prime Power Caterpillar EngineDocument7 pagesGenerator 3412 Set Prime Power Caterpillar Enginemoussa100% (3)
- Electrical Machines-IIDocument137 pagesElectrical Machines-IIgnathbl100% (1)
- 3512+1275+Kva+Prime+Low+Bsfc Emcp4Document6 pages3512+1275+Kva+Prime+Low+Bsfc Emcp4AlcatrazIINo ratings yet
- EL221-Electromechanical System Lab 07: D.C. MachineDocument17 pagesEL221-Electromechanical System Lab 07: D.C. MachineMuhammad AreebNo ratings yet
- S7L1D-G4 Wdg.312 - Technical Data SheetDocument9 pagesS7L1D-G4 Wdg.312 - Technical Data Sheet3efoo100% (1)
- DIN Wiring CodesDocument5 pagesDIN Wiring Codesgstipe50% (2)
- Mode of Operation:-1 Manual Mode 2 Auto Mode 3 Test Mode 4 Setting ModeDocument6 pagesMode of Operation:-1 Manual Mode 2 Auto Mode 3 Test Mode 4 Setting ModeshivanadarNo ratings yet
- 05 Transient Angle StabilityDocument109 pages05 Transient Angle StabilitysulemankhalidNo ratings yet
- Analysis of Steady State Performance of DFIG Under Different Power FactorsDocument59 pagesAnalysis of Steady State Performance of DFIG Under Different Power FactorsIvan Contrreras QuispeNo ratings yet
- 3100 Paralleling QST30 Service ManualDocument214 pages3100 Paralleling QST30 Service ManualVictor Julian Ortiz Porras0% (1)
- HGM6510 PDFDocument48 pagesHGM6510 PDFXnd DnsNo ratings yet
- EM Synchronous GeneratorDocument22 pagesEM Synchronous GeneratorDeepanshu SehgalNo ratings yet
- 18200314-Thermo King Sr-4 Single Temp Trailer Diagnoses ManualDocument659 pages18200314-Thermo King Sr-4 Single Temp Trailer Diagnoses Manualمعمر حميد100% (10)
- Physics ProjectDocument13 pagesPhysics ProjectDEEPAKNo ratings yet
- Pratica 2Document14 pagesPratica 2Eberton SantosNo ratings yet
- DC Generator Types and ComponentsDocument50 pagesDC Generator Types and ComponentsKazi Newaj FaisalNo ratings yet
- Generator Safety and Operation ManualDocument78 pagesGenerator Safety and Operation Manualcbeckdorf100% (1)
- Dse560 ManualDocument35 pagesDse560 ManualJaffer Hussain100% (6)
- Leroy Somer Rating Chart 4607j - enDocument24 pagesLeroy Somer Rating Chart 4607j - enEmraan MughalNo ratings yet
- GE G60 Training Manual FOR COA PP PDFDocument33 pagesGE G60 Training Manual FOR COA PP PDFamir ghasemifareNo ratings yet
- Top 200 electrical engineering interview questionsDocument94 pagesTop 200 electrical engineering interview questionsraj0% (2)
- 3 Phase 1500RPM Generating SetDocument2 pages3 Phase 1500RPM Generating SetAnamta KhanNo ratings yet
- Working Principle of Electric GeneratorDocument3 pagesWorking Principle of Electric Generatorsajjad ali0% (1)