You might also like
- The Year's Best Horror Stories - Karl Edward Wagner PDFDocument298 pagesThe Year's Best Horror Stories - Karl Edward Wagner PDFAmbaejo96100% (1)
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Easy Stretching PosturesDocument118 pagesEasy Stretching Postures김종빈100% (3)
- Safe City in Malaysia's ContextDocument8 pagesSafe City in Malaysia's Contextuyunaman100% (1)
- RHCSA Sa1 2 EXAM Questions (1) 1Document23 pagesRHCSA Sa1 2 EXAM Questions (1) 1hosnitmiNo ratings yet
- Substation DiaryDocument50 pagesSubstation Diaryrajat123sharmaNo ratings yet
- Senior Instrument Engineer Resume - AhammadDocument5 pagesSenior Instrument Engineer Resume - AhammadSayed Ahammad100% (1)
- ILS SystemDocument7 pagesILS SystemAneeb AhmedNo ratings yet
- Implementation of Inverted Pendulum Control, Plunks On Miscellaneous TacticsDocument6 pagesImplementation of Inverted Pendulum Control, Plunks On Miscellaneous TacticsirqoviNo ratings yet
- Modeling and Control of A Rotary Inverted PendulumDocument6 pagesModeling and Control of A Rotary Inverted PendulumsalmanNo ratings yet
- Low-Cost Microcontroller-Based Hover Control Design of A QuadcopterDocument7 pagesLow-Cost Microcontroller-Based Hover Control Design of A QuadcopterDanny AlejandroNo ratings yet
- Design of Robust Fuzzy Controllers For Aerospace ApplicationsDocument5 pagesDesign of Robust Fuzzy Controllers For Aerospace ApplicationsRitesh SinghNo ratings yet
- Optimal PID Controller Design of An Inverted Pendulum Dynamics A Hybrid Pole-Placement and Firefly Algorithm ApproachDocument6 pagesOptimal PID Controller Design of An Inverted Pendulum Dynamics A Hybrid Pole-Placement and Firefly Algorithm ApproachAraceli CastruitaNo ratings yet
- A Sliding Mode-Multimodel Control For A Sensorless Pumping SystemDocument6 pagesA Sliding Mode-Multimodel Control For A Sensorless Pumping SystemKatherine DukeNo ratings yet
- p311 PDFDocument9 pagesp311 PDFmohammad naseemNo ratings yet
- Fuzzy Logic Control vs. Conventional PID Control of An Inverted Pendulum RobotDocument6 pagesFuzzy Logic Control vs. Conventional PID Control of An Inverted Pendulum RobotMiguelNo ratings yet
- Performance Comparison Between LQR and PID Controller For An Inverted Pendulum SystemDocument5 pagesPerformance Comparison Between LQR and PID Controller For An Inverted Pendulum SystemSanjiv CrNo ratings yet
- Project 2 Report Baileyryan RoslynvansickleDocument15 pagesProject 2 Report Baileyryan Roslynvansickleapi-414830668No ratings yet
- Adaptive Fuzzy Controller: Application To The Control of The Temperature of A Dynamic Room in Real TimeDocument18 pagesAdaptive Fuzzy Controller: Application To The Control of The Temperature of A Dynamic Room in Real TimeLittle ChickNo ratings yet
- Position Control of A Pneumatic Levitation SystemDocument6 pagesPosition Control of A Pneumatic Levitation SystemJohn Ninaja CarballoNo ratings yet
- Design of Missile Two-Loop Auto-Pilot Pitch Using Root LocusDocument6 pagesDesign of Missile Two-Loop Auto-Pilot Pitch Using Root LocusLukkana VaraprasadNo ratings yet
- Regulationofapump Tank SensorsystemusingtwofractionalcontrollersDocument23 pagesRegulationofapump Tank SensorsystemusingtwofractionalcontrollersJosh GonzalesNo ratings yet
- Trajectory Tracking For The Magnetic Ball Levitation System Via Exact Feedforward Linearisation and GPI ControlDocument12 pagesTrajectory Tracking For The Magnetic Ball Levitation System Via Exact Feedforward Linearisation and GPI ControlChe ItoNo ratings yet
- Sliding Mode Control PHD ThesisDocument7 pagesSliding Mode Control PHD Thesisaflodnyqkefbbm100% (1)
- Double Integrator SystemsDocument4 pagesDouble Integrator SystemsRick GongNo ratings yet
- An Aeroload SimulatorDocument71 pagesAn Aeroload SimulatorNikunj AgarwalNo ratings yet
- SantaDocument11 pagesSantaVashik BedasieNo ratings yet
- Closedloop PID Control of Universal MotorDocument9 pagesClosedloop PID Control of Universal MotorabhywaNo ratings yet
- Simulation of Self-Tuning Pid-Type Fuzzy Adaptive Control of A Hvac SystemDocument7 pagesSimulation of Self-Tuning Pid-Type Fuzzy Adaptive Control of A Hvac SystemwendyNo ratings yet
- Crane State Space ModelDocument12 pagesCrane State Space ModelSarojakanti SahooNo ratings yet
- Moving Horizon Model Based Control in The Presence of Feedback NoiseDocument3 pagesMoving Horizon Model Based Control in The Presence of Feedback NoiseATSNo ratings yet
- Neural Network Sliding-Mode Position Controller For Induction Servo DriveDocument12 pagesNeural Network Sliding-Mode Position Controller For Induction Servo DriveumerNo ratings yet
- Design and Experimentation of A Self-Tuning PID Control Applied To The 3DOF HelicopterDocument21 pagesDesign and Experimentation of A Self-Tuning PID Control Applied To The 3DOF HelicopterMairaj-ud-din MuftiNo ratings yet
- Constraintoptimal Control For GyroscopeDocument7 pagesConstraintoptimal Control For GyroscopeInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Power System Stabilizers As Undergraduate Control Design ProjectsDocument8 pagesPower System Stabilizers As Undergraduate Control Design Projectsabhikirk99No ratings yet
- Research Article: Force Control For A Pneumatic Cylinder Using Generalized Predictive Controller ApproachDocument6 pagesResearch Article: Force Control For A Pneumatic Cylinder Using Generalized Predictive Controller ApproachShubham KaushikNo ratings yet
- Particle Swarm Optimization Based Sliding Mode Control of Variable Speed Wind Energy Conversion SystemDocument11 pagesParticle Swarm Optimization Based Sliding Mode Control of Variable Speed Wind Energy Conversion SystemBukan Syahrul Yasin LimpoNo ratings yet
- Identification and Optimization of Pi Parameters Based On Genetic Algorithm For Non Linear System Using MatlabDocument51 pagesIdentification and Optimization of Pi Parameters Based On Genetic Algorithm For Non Linear System Using Matlabjagateesan50% (2)
- Comparative Study Between The Conventional Regulators and Fuzzy Logic Controller: Application On The Induction MachineDocument17 pagesComparative Study Between The Conventional Regulators and Fuzzy Logic Controller: Application On The Induction Machinemechernene_aek9037No ratings yet
- Farid ArvaniDocument6 pagesFarid ArvaniDasuki FahmiNo ratings yet
- 1 From Classical Control To Fuzzy Logic ControlDocument15 pages1 From Classical Control To Fuzzy Logic Controljunior_moschen9663No ratings yet
- Letters: Stable and Optimal Fuzzy Control of Linear SystemsDocument7 pagesLetters: Stable and Optimal Fuzzy Control of Linear Systemsengelx1x2x3No ratings yet
- Fuzzy Control Distillation ColumnDocument5 pagesFuzzy Control Distillation ColumnhardmanpersonNo ratings yet
- Nurtac Akdag - Istanbul Technical UniversityDocument7 pagesNurtac Akdag - Istanbul Technical Universitykarthikeyan mpNo ratings yet
- Optimal Control of Inverted Pendulum Using Fuzzy Logic, PID & LQR ControllerDocument8 pagesOptimal Control of Inverted Pendulum Using Fuzzy Logic, PID & LQR Controllershekhar yadavNo ratings yet
- PIContoller Researchand DesignDocument14 pagesPIContoller Researchand DesignRASCOR VADERNo ratings yet
- Wind Turbine Control With Multiple Model Predictive ControlDocument6 pagesWind Turbine Control With Multiple Model Predictive ControlAngelo Sanchez IafantiNo ratings yet
- Rezumat Adrian DUKADocument0 pagesRezumat Adrian DUKADina GaranNo ratings yet
- Level Control in Horizontal Tank by Fuzzy Controller: Satean and Santi Wangnipparnto2 'DepartmentDocument4 pagesLevel Control in Horizontal Tank by Fuzzy Controller: Satean and Santi Wangnipparnto2 'DepartmentvndhilmechNo ratings yet
- Group 4 Lab 5Document16 pagesGroup 4 Lab 5Melaku DinkuNo ratings yet
- On Fractional P I Controllers: Some Tuning Rules For Robustness To Plant UncertaintiesDocument18 pagesOn Fractional P I Controllers: Some Tuning Rules For Robustness To Plant UncertaintiesabdieljosadacNo ratings yet
- Lab 5 Reportgroup Name IdDocument16 pagesLab 5 Reportgroup Name IdMelaku DinkuNo ratings yet
- WWW - Unlock PDF - Com 952928Document23 pagesWWW - Unlock PDF - Com 952928Davidleonardo GalindoNo ratings yet
- Turbine Governor ModelingDocument28 pagesTurbine Governor ModelingGuruxyz100% (1)
- An Adaptive Fuzzy Pid Control of Hydro-Turbine Governor: Xiao-Ying Zhang, Ming-Guang ZhangDocument5 pagesAn Adaptive Fuzzy Pid Control of Hydro-Turbine Governor: Xiao-Ying Zhang, Ming-Guang ZhangPadmo PadmundonoNo ratings yet
- Conventional and Intelligent Controller For Quarter Car Suspension SystemDocument4 pagesConventional and Intelligent Controller For Quarter Car Suspension SystemInternational Jpurnal Of Technical Research And ApplicationsNo ratings yet
- Fuzzy Control of Ac InductionDocument6 pagesFuzzy Control of Ac Inductionapi-19667371100% (1)
- Implementation: FullyDocument5 pagesImplementation: FullyMohit SoniNo ratings yet
- 0291 Icnsc231Document6 pages0291 Icnsc231Karthik Annamalai N RNo ratings yet
- Implementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicDocument4 pagesImplementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicJessica RossNo ratings yet
- Hard Disk Drive Servo ControlDocument20 pagesHard Disk Drive Servo ControlMohammad IkhsanNo ratings yet
- A Simulink Environment For Simulation and Control of Flexible Manipulator SystemsDocument6 pagesA Simulink Environment For Simulation and Control of Flexible Manipulator SystemsselvamNo ratings yet
- Ica20110200001 94894672Document8 pagesIca20110200001 94894672Anggara T NugrahaNo ratings yet
- Lab 5 ReportDocument12 pagesLab 5 ReportMelaku DinkuNo ratings yet
- ENGG 3490 Mechatronics Systems Design: Lab 3: Closed Loop ControlDocument11 pagesENGG 3490 Mechatronics Systems Design: Lab 3: Closed Loop ControlassnadNo ratings yet
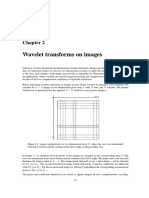
- Wavelet AnalysisDocument6 pagesWavelet AnalysislamuelNo ratings yet
- Wavelets On ImagesDocument8 pagesWavelets On ImageslamuelNo ratings yet
- Model Fuuzy PaperDocument20 pagesModel Fuuzy PaperlamuelNo ratings yet
- Cell Phone Based Voting MachineDocument56 pagesCell Phone Based Voting MachineHemant100% (5)
- Home Automation Using Phone (DTMF Touch-Tone) Final ReportDocument26 pagesHome Automation Using Phone (DTMF Touch-Tone) Final Reportv2brotherNo ratings yet
- Career GuidanceDocument41 pagesCareer GuidancelamuelNo ratings yet
- Career ChoiceDocument9 pagesCareer ChoicelamuelNo ratings yet
- 10 17 1 PB PDFDocument14 pages10 17 1 PB PDFnylorjayNo ratings yet
- What Is Low Immune FunctionDocument4 pagesWhat Is Low Immune FunctionlamuelNo ratings yet
- Master Pages:: Creating A Site-Wide Layout Using Master PagesDocument18 pagesMaster Pages:: Creating A Site-Wide Layout Using Master PagesCarlos LopezNo ratings yet
- Usm StanDocument5 pagesUsm StanClaresta JaniceNo ratings yet
- FROG Chapter08 PDFDocument37 pagesFROG Chapter08 PDF신재호No ratings yet
- RCA 1 and 2 Wafer CleanDocument3 pagesRCA 1 and 2 Wafer CleanJoonhyuk HwangNo ratings yet
- PLDP Report - Mba ProfDocument21 pagesPLDP Report - Mba ProfChaitanya NarvekarNo ratings yet
- CST 100 Course Syllabus Fall 2009Document4 pagesCST 100 Course Syllabus Fall 2009Naaman WoodNo ratings yet
- The Philosophical Foundations of Educational Research: A Beginner's GuideDocument6 pagesThe Philosophical Foundations of Educational Research: A Beginner's GuideGlorie RoxasNo ratings yet
- Phys101l Ex104Document2 pagesPhys101l Ex104koko BunchNo ratings yet
- Float Sink Lesson Plan 2Document3 pagesFloat Sink Lesson Plan 2api-388627256No ratings yet
- End of Semester ReflectionDocument3 pagesEnd of Semester Reflectionapi-242745290No ratings yet
- Resume Updated 12 31Document2 pagesResume Updated 12 31api-436752595No ratings yet
- NamdarDocument38 pagesNamdarthe next miamiNo ratings yet
- Intelligent Design of Industrial Steel Buildings - A BIM ApproachDocument8 pagesIntelligent Design of Industrial Steel Buildings - A BIM Approachshubham kothawadeNo ratings yet
- Cs 1410Document2 pagesCs 1410David DengNo ratings yet
- Module 4 - Instruction Set Architecture (ISA) v2 (Student) PDFDocument49 pagesModule 4 - Instruction Set Architecture (ISA) v2 (Student) PDFnedunilavanNo ratings yet
- Manual To KivyDocument2 pagesManual To KivyvalkmaxNo ratings yet
- Processes 05 00040 PDFDocument15 pagesProcesses 05 00040 PDFPedro Romel Nascimento HerbayNo ratings yet
- Dem Watershed DelineationDocument43 pagesDem Watershed DelineationHamse HusseinNo ratings yet
- Cs 50Document5 pagesCs 50bobNo ratings yet
- Concept Screening-PostedDocument16 pagesConcept Screening-PostedCintia NurliyanaNo ratings yet
- Oracle OTL Timecard Layout CustomicationDocument138 pagesOracle OTL Timecard Layout CustomicationFoolIshNo ratings yet
- Cap 05Document10 pagesCap 05haulam leeNo ratings yet
- Github & SourceTree Manual - 15831Document6 pagesGithub & SourceTree Manual - 15831Jose Cristian Cañaveras VelezNo ratings yet
- Land Reclamation in SingaporeDocument27 pagesLand Reclamation in SingaporeAbdul JabbarNo ratings yet