You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Som 2013 - 001 PDFDocument431 pagesSom 2013 - 001 PDFKumar SamreshNo ratings yet
- Exp 4Document8 pagesExp 4Kumar SamreshNo ratings yet
- Mixed Mode FractureDocument2 pagesMixed Mode FractureKumar SamreshNo ratings yet
- Crack Initiation Takes Place in A Direction Determined by The Stationary of The Energy Density Factor IDocument1 pageCrack Initiation Takes Place in A Direction Determined by The Stationary of The Energy Density Factor IKumar SamreshNo ratings yet
- Impact TestDocument4 pagesImpact TestKumar SamreshNo ratings yet
- Strain Measuring With The Help of Wheatstone BridgeDocument17 pagesStrain Measuring With The Help of Wheatstone BridgeKumar SamreshNo ratings yet
- At The Completion of The CourseDocument2 pagesAt The Completion of The Courseoday albuthbahakNo ratings yet
- Ossd U1Document26 pagesOssd U1huangjunxiang4No ratings yet
- Physics General (PHSG) Class Notes Department of Physics Rishi Bankim Chandra Evening CollegeDocument3 pagesPhysics General (PHSG) Class Notes Department of Physics Rishi Bankim Chandra Evening CollegeFavourite MoviesNo ratings yet
- Chapter 9 VibrationDocument83 pagesChapter 9 Vibration胡宇晟No ratings yet
- Curtain Wall Calculation PDFDocument134 pagesCurtain Wall Calculation PDFAlaaBadwy100% (1)
- Tarea 1 MunsonDocument4 pagesTarea 1 MunsonAlexander JohnsonNo ratings yet
- Str-A6051 52 53 59 61 62 69 79Document13 pagesStr-A6051 52 53 59 61 62 69 79Александр АндриановNo ratings yet
- Engineering Structures: Cengizhan Durucan, Murat DicleliDocument16 pagesEngineering Structures: Cengizhan Durucan, Murat DicleliJhon Smit Gonzales UscataNo ratings yet
- Physics Investigatory Project: Electromagnetic InductionDocument16 pagesPhysics Investigatory Project: Electromagnetic InductionRajesh ChoudharyNo ratings yet
- New Regulations For Geotech GermanyDocument10 pagesNew Regulations For Geotech GermanySâu HeoNo ratings yet
- Nanoacoustic WaveguidesDocument51 pagesNanoacoustic WaveguidesWoodrow FoxNo ratings yet
- 4 - Vectors and Tensors - Lesson4Document22 pages4 - Vectors and Tensors - Lesson4emmanuel FOYETNo ratings yet
- ch13 DynamicsDocument64 pagesch13 DynamicsIfea WongNo ratings yet
- Rate of Reaction FactorsDocument3 pagesRate of Reaction FactorsFungai mhlangaNo ratings yet
- JNTU World Geotech Engineering ExamDocument4 pagesJNTU World Geotech Engineering ExamDp VisheshNo ratings yet
- ADMmodule - STEM - GP12N-Id-28Document24 pagesADMmodule - STEM - GP12N-Id-28Jersa Mae MaravillaNo ratings yet
- Physics Investigatory ProjectDocument18 pagesPhysics Investigatory ProjectRΛJIBUL ISLΛMNo ratings yet
- Case Based CH-3 Motion in Straight LineDocument5 pagesCase Based CH-3 Motion in Straight LineGaneshNo ratings yet
- Cosmos 2007Document38 pagesCosmos 2007Oswaldo NeaveNo ratings yet
- Chapter 1 Units and VectorsDocument33 pagesChapter 1 Units and VectorslozzzzzNo ratings yet
- Observer-Based Monitoring of Heat ExchangersDocument10 pagesObserver-Based Monitoring of Heat ExchangersMiguel LópezNo ratings yet
- DividersDocument7 pagesDividersVenkatesh KarriNo ratings yet
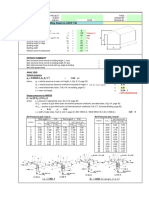
- Wind Analysis For Low-Rise Building, Based On ASCE 7-98Document2 pagesWind Analysis For Low-Rise Building, Based On ASCE 7-98reynoldNo ratings yet
- Asignment 2Document3 pagesAsignment 2EngrAneelKumarAkhaniNo ratings yet
- Archimedes' Principle and Buoyant ForcesDocument20 pagesArchimedes' Principle and Buoyant ForcesAnonymous yfkitRbSvZNo ratings yet
- Atomic Structure Basic ConceptsDocument39 pagesAtomic Structure Basic ConceptsTithiparna SenguptaNo ratings yet
- Dynamic Parameter Identification of The Universal Robots UR5 PDFDocument7 pagesDynamic Parameter Identification of The Universal Robots UR5 PDFAyman DamounNo ratings yet
- CH 04Document17 pagesCH 04Vishal PanwarNo ratings yet
- ASTM D287 - 12bDocument5 pagesASTM D287 - 12bmancjaNo ratings yet
- ABB Motors Technical Data SheetDocument1 pageABB Motors Technical Data SheetAgung AfrizalNo ratings yet