You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Gcesoln 7Document7 pagesGcesoln 7api-3734333No ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Reduction of Organic Compounds With Sodium Borohydride-Transition Metal Salt Systems - Reduction of Organic Nitrile, Nitro and Amide Compounds To Primary AminesDocument4 pagesReduction of Organic Compounds With Sodium Borohydride-Transition Metal Salt Systems - Reduction of Organic Nitrile, Nitro and Amide Compounds To Primary AminesjavasoloNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Utkarsh Paper Class XI 17.10.2022Document11 pagesUtkarsh Paper Class XI 17.10.2022HarshNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Solubility of Water in Hydrocarbons - Hibbard & SchallaDocument27 pagesSolubility of Water in Hydrocarbons - Hibbard & SchallarschirtNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Co (NH3) 6Document1 pageCo (NH3) 6Ayotunde OnasanyaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- (Pp.401-411) Dry Method-Ex of Magmas and GelsDocument11 pages(Pp.401-411) Dry Method-Ex of Magmas and GelsJicah Mae LumbaoNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Ce8302 QBDocument10 pagesCe8302 QBPung Kang QinNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Combinepdf 1Document18 pagesCombinepdf 1Christian BlasNo ratings yet
- Bromination of ArenesDocument13 pagesBromination of ArenesDaniel O ZamoraNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Quantifying Trimethylamine and Trimethylamine-N-Oxide in Human Plasma: Interference From Endogenous Quaternary Ammonium CompoundsDocument3 pagesQuantifying Trimethylamine and Trimethylamine-N-Oxide in Human Plasma: Interference From Endogenous Quaternary Ammonium CompoundsVeneta GizdakovaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- GATE-PYQ-Topicwise Noor Ul Huda SirDocument585 pagesGATE-PYQ-Topicwise Noor Ul Huda SirSudha balakrishnan100% (2)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Fem Analysis of Jack-Up Spudcane Penetration PDFDocument10 pagesFem Analysis of Jack-Up Spudcane Penetration PDFSơn Nguyễn-LêNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Misconceptions in Physics StudentsDocument6 pagesMisconceptions in Physics StudentsAnonymous Zk2vW6ylNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Chemistry IA Example 2Document12 pagesChemistry IA Example 2Vanessa Tumanggor100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Oil and Your EngineDocument44 pagesOil and Your EngineAlberto PANo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- IGCSE BIOLOGY Exercises 01 Principles of BiologyDocument6 pagesIGCSE BIOLOGY Exercises 01 Principles of Biologyngole_96No ratings yet
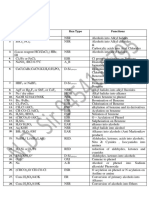
- Organic ReagentsDocument3 pagesOrganic ReagentsKushagra Rai100% (1)
- HOPPY: An Open-Source and Low-Cost Kit For Dynamic Robotics EducationDocument8 pagesHOPPY: An Open-Source and Low-Cost Kit For Dynamic Robotics Educationchoco bananaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Nazis Tried To Turn Sand in To GoldDocument9 pagesNazis Tried To Turn Sand in To GoldJorge Daniel Ferreira GranadosNo ratings yet
- Nuclear ChemistryDocument4 pagesNuclear ChemistryYe JinNo ratings yet
- ASTM E 45-2005 (E 2007) (E 2008) Standard Test Methods For Determining The Inclusion Content of SteelDocument19 pagesASTM E 45-2005 (E 2007) (E 2008) Standard Test Methods For Determining The Inclusion Content of SteelTausif LodhiNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Welded Nickel and Nickel-Cobalt Alloy Pipe: Standard Specification ForDocument5 pagesWelded Nickel and Nickel-Cobalt Alloy Pipe: Standard Specification ForZouhair BoukriNo ratings yet
- Australian National Measurement Institune - Monograph 7 - Pressure Measurement - Randall Anderson Et Al. - 2nd Edition - 2003Document246 pagesAustralian National Measurement Institune - Monograph 7 - Pressure Measurement - Randall Anderson Et Al. - 2nd Edition - 2003teewohdNo ratings yet
- LunaGrid Considerations For Developing An Expandable & Distributed Lunar Power GridDocument1 pageLunaGrid Considerations For Developing An Expandable & Distributed Lunar Power Gridewillia13No ratings yet
- Lab 3 Biological MoleculesDocument6 pagesLab 3 Biological Moleculesjohn NisNo ratings yet
- Z 200 Libs Analyser Laser Induced Breakdown Spectroscopy21 - 59 - 37Document2 pagesZ 200 Libs Analyser Laser Induced Breakdown Spectroscopy21 - 59 - 37BUTUCARU PETRICANo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Thermal InsulationDocument28 pagesThermal Insulationferozbabu100% (2)
- Fabrication and Tribological Behavior of Al2O3 (MoS2-BaSO4) LaminatedDocument8 pagesFabrication and Tribological Behavior of Al2O3 (MoS2-BaSO4) LaminatedMouna KallelNo ratings yet
- 9701 s10 QP 23Document12 pages9701 s10 QP 23Hubbak KhanNo ratings yet
- Postharvest Biology and Technology: A A A B C A D DDocument10 pagesPostharvest Biology and Technology: A A A B C A D DRestrepo JuanNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)